Usage of a computer cluster for physics simulations using bullet engine and OpenCL
DOI:
https://doi.org/10.15587/2706-5448.2023.285543Keywords:
3D space, continuous space, collision solution, collision detection, cloud technologies, distributed computing, high-performance computingAbstract
The study focuses on using a computer cluster for implementing real-time physical simulations, responding to a growing need for such use in various sectors, including medicine, video processing, automated transport management, robotics, and visualisation. The object of research is cluster and cloud technologies for conducting costly physical simulations for specific sectors, particularly high-budget and entertainment ones, such as cinematography and interactive entertainment.
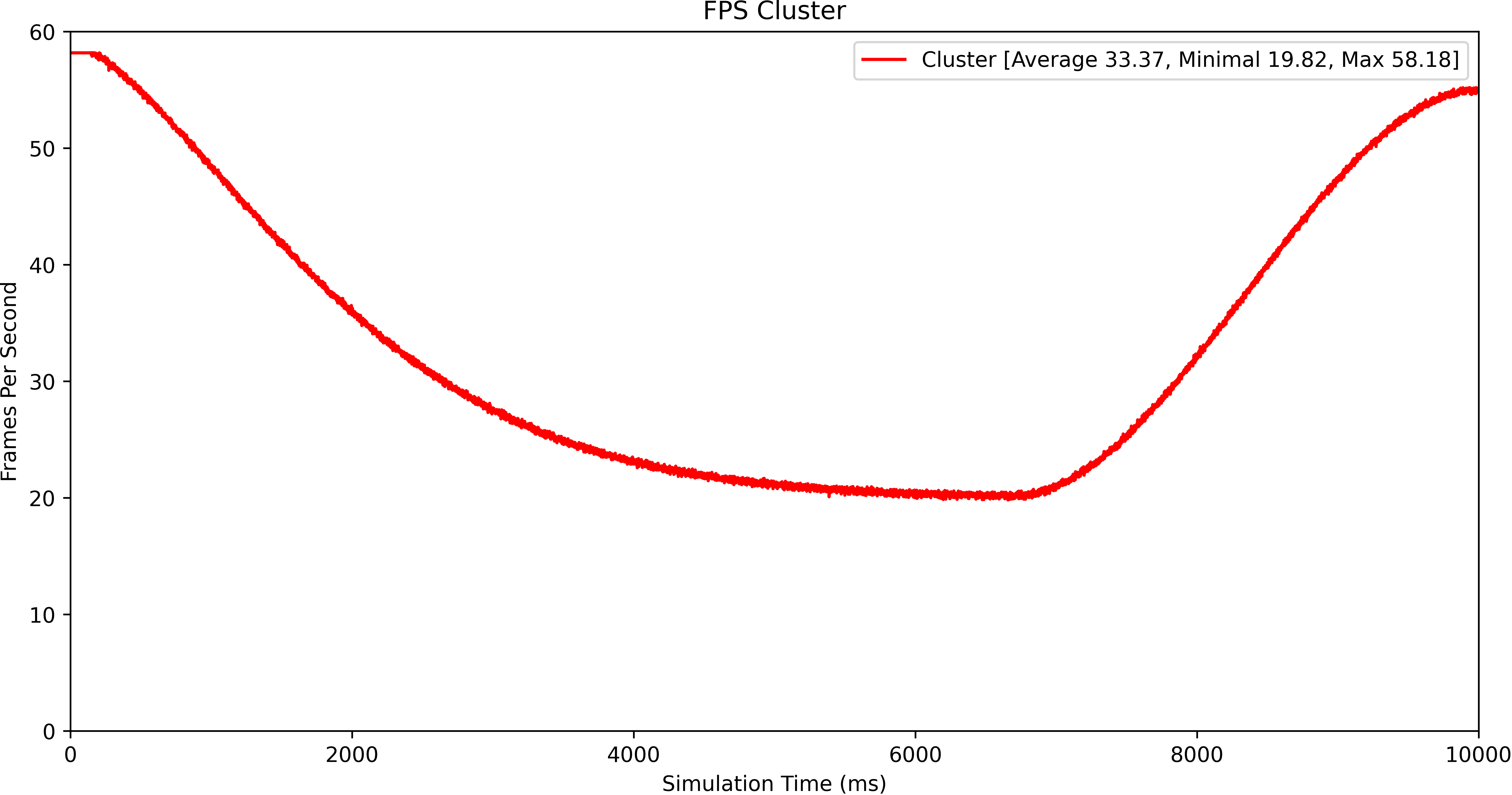
Research methods include using a modified Bullet engine to carry out physical simulations, integrated with OpenCL to work with the cluster. The choice of these technologies was determined by their high performance and adaptability to cluster systems. The research was based on a typical Bullet framework’s benchmark falling tower scene with the primary goal of measuring computational performance in frames per second.
Results showed that the use of clusters is not advisable in environments with a low network throughput and the use of non-uniform computers. Under those conditions, simulations using a cluster become unstable with many objects and contacts between them and show a degradation in performance by an average of 50–60 % (to values of 10–20 frames per second).
Despite the intermediate results of calculations on the cluster, the study met the expectations within the goals set and resources available. These results have significant implications for the further development of cluster and cloud technologies in physical simulations, providing valuable information about the limitations and capabilities of these systems.
References
- Lewis, N. S., Winter, A. O., Bonus, J., Motley, M. R., Eberhard, M. O., Arduino, P., Lehman, D. E. (2023). Open-source simulation of strongly-coupled fluid-structure interaction between non-conformal interfaces. Frontiers in Built Environment, 9. doi: https://doi.org/10.3389/fbuil.2023.1120518
- Merchant, N., Sampson, A. T., Boiko, A., Falconer, R. E. (2023). Dense agent-based HPC simulation of cell physics and signaling with real-time user interactions. Frontiers in Computer Science, 5. doi: https://doi.org/10.3389/fcomp.2023.1085867
- Jorissen, K., Vila, F. D., Rehr, J. J. (2012). A high performance scientific cloud computing environment for materials simulations. Computer Physics Communications, 183 (9), 1911–1919. doi: https://doi.org/10.1016/j.cpc.2012.04.010
- Serpa, Y. R., Rodrigues, M. A. F. (2020). Broad Phase Collision Detection: New Methodology and Solution for Standardized Analysis of Algorithms. Anais Estendidos Da Conference on Graphics, Patterns and Images (SIBRAPI Estendido 2020). doi: https://doi.org/10.5753/sibgrapi.est.2020.12982
- Cohen, J. D., Lin, M. C., Manocha, D., Ponamgi, M. (1995). I-COLLIDE. Proceedings of the 1995 Symposium on Interactive 3D Graphics – SI3D ’95. doi: https://doi.org/10.1145/199404.199437
- Kockara, S., Halic, T., Iqbal, K., Bayrak, C., Rowe, R. (2007). Collision detection: A survey. 2007 IEEE International Conference on Systems, Man and Cybernetics. doi: https://doi.org/10.1109/icsmc.2007.4414258
- Xiaoguang, A., Ling, L. (2016). A Study of Collision Detection Algorithm Based on Cloud Computing Model. 2016 International Conference on Intelligent Transportation, Big Data & Smart City (ICITBS). doi: https://doi.org/10.1109/icitbs.2016.9
- Erez, T., Tassa, Y., Todorov, E. (2015). Simulation tools for model-based robotics: Comparison of Bullet, Havok, MuJoCo, ODE and PhysX. 2015 IEEE International Conference on Robotics and Automation (ICRA). doi: https://doi.org/10.1109/icra.2015.7139807
- Larsson, T., Akenine-Möller, T. (2006). A dynamic bounding volume hierarchy for generalized collision detection. Computers & Graphics, 30 (3), 450–459. doi: https://doi.org/10.1016/j.cag.2006.02.011
- Barak, A., Ben-Nun, T., Levy, E., Shiloh, A. (2010). A package for OpenCL based heterogeneous computing on clusters with many GPU devices. 2010 IEEE International Conference On Cluster Computing Workshops and Posters (CLUSTER WORKSHOPS). doi: https://doi.org/10.1109/clusterwksp.2010.5613086
- Yoon, J., Son, B., Lee, D. (2023). Comparative Study of Physics Engines for Robot Simulation with Mechanical Interaction. Applied Sciences, 13 (2), 680. doi: https://doi.org/10.3390/app13020680
- Chau, S.-C., Fu, A. W.-C. (2004). Load Balancing between Heterogeneous Computing Clusters. Lecture Notes in Computer Science, 75–82. doi: https://doi.org/10.1007/978-3-540-24679-4_19
- Ströter, D., Mueller-Roemer, J. S., Stork, A., Fellner, D. W. (2020). OLBVH: octree linear bounding volume hierarchy for volumetric meshes. The Visual Computer, 36 (10-12), 2327–2340. doi: https://doi.org/10.1007/s00371-020-01886-6
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Oleksandr Beznosyk, Oleksandr Syrotiuk

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.





