Improving safety and efficiency for fixed-wing UAVs by utilizing an unmanned ground platform
DOI:
https://doi.org/10.15587/2706-5448.2025.339881Keywords:
unmanned ground platform, UAV, military personnel safety, remote launch, modelingAbstract
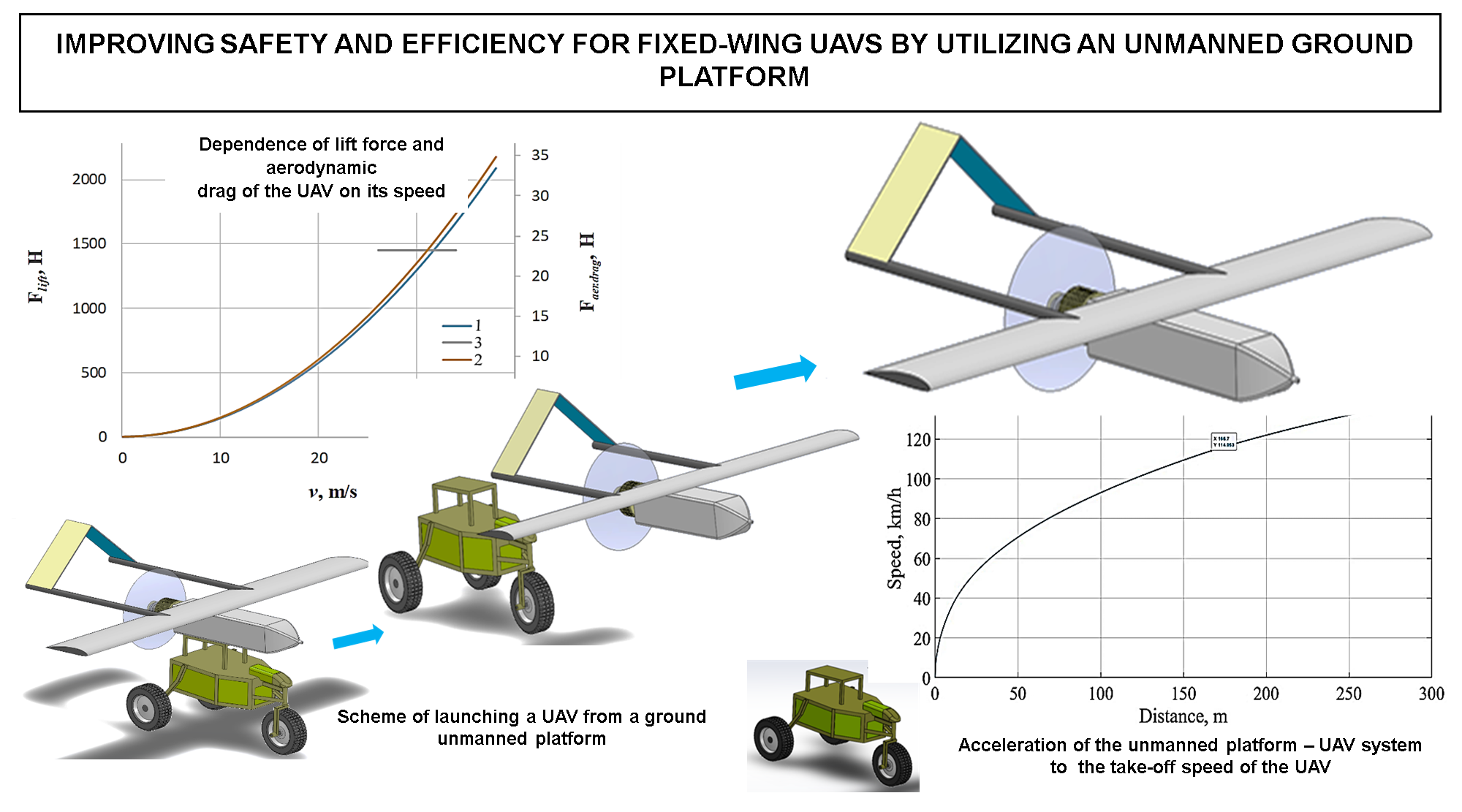
The object of this research was the launch process of fixed-wing unmanned aerial vehicles. Military unmanned aerial vehicle systems are rapidly improving and becoming increasingly effective on the battlefield and in the enemy's rear. However, the complex and dynamic environment of modern warfare significantly impacts the preparation and launch of UAVs. Therefore, ensuring the maximum safety of these operations is one of the key factors influencing the overall effectiveness of these systems. At the same time, the launch operation requires personnel to be in an open area, making it a critical task to find solutions to protect UAV crews from enemy attacks. A possible solution is the remote control of the UAV launch. This article proposes using unmanned ground platforms for the remote launch of fixed-wing UAVs to reduce the probability of enemy strikes against crews and equipment. The research included modeling and comparing the launch of a fixed-wing UAV from a runway and with the help of an unmanned ground platform. The modeling results showed that launching from the platform reduces the takeoff distance by 39.1% (from 273.6 m to 166.7 m) and the operation time by more than half (from ~23 s to 9.2 s). This overall reduction will decrease the probability of the unmanned equipment being struck by the enemy. An additional advantage of this method is reduced fuel consumption. It also allows for the use of a propeller that is more efficient for flight, which is not possible with a traditional runway takeoff. Reducing the strength requirements for the drone's airframe allows for a decrease in its mass, which, in turn, increases the mass of the warhead or reconnaissance equipment.
References
- Onyshchenko, S., Skryl, V., Hlushko, A., Maslii, O. (2023). Inclusive Development Index. Proceedings of the 4th International Conference on Building Innovations. Cham: Springer, 779–790. https://doi.org/10.1007/978-3-031-17385-1_66
- Laktionov, O., Yanko, A., Pedchenko, N. (2024). Identification of air targets using a hybrid clustering algorithm. Eastern-European Journal of Enterprise Technologies, 5 (4 (131)), 89–95. https://doi.org/10.15587/1729-4061.2024.314289
- Yanko, A., Pedchenko, N., Kruk, O. (2024). Enhancing the protection of automated ground robotic platforms in the conditions of radio electronic warfare. Naukovyi Visnyk Natsionalnoho Hirnychoho Universytetu, 6, 136–142. https://doi.org/10.33271/nvngu/2024-6/136
- Laktionov, O., Yanko, A., Hlushko, A. (2024). Development of a hardware-software solution for detection of complex-shaped objects in video stream. Technology Audit and Production Reserves, 6 (2 (80)), 35–40. https://doi.org/10.15587/2706-5448.2024.319799
- Barabash, O., Kyrianov, A. (2023). Development of control laws of unmanned aerial vehicles for performing group flight at the straight-line horizontal flight stage. Advanced Information Systems, 7 (4), 13–20. https://doi.org/10.20998/2522-9052.2023.4.02
- Xiaoning, Z. (2020). Analysis of military application of UAV swarm technology. 2020 3rd International Conference on Unmanned Systems (ICUS), 1200–1204. https://doi.org/10.1109/icus50048.2020.9274974
- Jackman, A. (2019). Consumer drone evolutions: trends, spaces, temporalities, threats. Defense & Security Analysis, 35 (4), 362–383. https://doi.org/10.1080/14751798.2019.1675934
- Edward, M. (2009). Exploring Transportation Applications of Small Unmanned Aircraft. Ite Journal, 79, 32–36. Available at: https://www.researchgate.net/publication/298279257_Exploring_Transportation_Applications_of_Small_Unmanned_Aircraft
- Yue, S. (2013). Small Unmanned Aircraft: Theory and Practice R. W. Beard and T. W. McLain Princeton University Press. 6 Oxford Street, Woodstock, OX20 1TW, UK. 2012. 300pp. Illustrated. £69.95. ISBN 978-0-691-14921-9. The Aeronautical Journal, 117 (1194), 861–861. https://doi.org/10.1017/s0001924000008496
- Cabarbaye, A., Leal, R. L., Fabiani, P., Estrada, M. B. (2016). VTOL aircraft concept, suitable for unmanned applications, with equivalent performance compared to conventional aeroplane. 2016 International Conference on Unmanned Aircraft Systems (ICUAS), 219–226. https://doi.org/10.1109/icuas.2016.7502649
- Liu, D., Liu, G., Hong, G. (2016). Analysis of Onboard Takeoff and Landing Characteristics for Unmanned Aerial Vehicles. AIAA Modeling and Simulation Technologies Conference. https://doi.org/10.2514/6.2016-3376
- Novaković, Z., Medar, N. (2013). Analysis of a UAV Bungee Cord Launching Device. Scientific Technical Review, 63 (3), 41–47. Available at: http://www.vti.mod.gov.rs/ntp/rad2013/3-13/6/6.pdf
- Lütjens, K., Lau, A., Pfeiffer, T., Loth, S., Gollnick, V., Klimek, H. et al. (2012). Airport2030-Lösungen für den effizienten Lufttransport der Zukunft. Deutscher Luft- und Raumfahrtkongress, 1–10. Available at: https://www.dglr.de/publikationen/2012/281494.pdf
- Austin, R. (2010). Unmanned aircraft systems: UAVS design, development and deployment. John Wiley & Sons Ltd. https://doi.org/10.1002/9780470664797
- Zhen, Z., Jiang, J., Wang, X., Li, K. (2017). Modeling, control design, and influence analysis of catapult-assisted take-off process for carrier-based aircrafts. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 232 (13), 2527–2540. https://doi.org/10.1177/0954410017715278
- Wang, Z., Gong, Z., Zhang, C., He, J., Mao, S. (2021). Flight Test of L1 Adaptive Control on 120-kg-Class Electric Vertical Take-Off and Landing Vehicles. IEEE Access, 9, 163906–163928. https://doi.org/10.1109/access.2021.3132963
- Fahlstrom, P. G., Gleason, T. J. (2012). Introduction to UAV Systems, Fourth Edition. https://doi.org/10.1002/9781118396780
- Novaković, Z., Medar, N. (2014). Design of UAV Elastic Cord Catapult. OTEH 2014. 6th International Scientific Conference on Defensive Technologies, 141–150. Available at: https://www.scribd.com/document/326791980/Zbornik-radova-sa-OTEH-2014
- Bertola, L., Cox, T., Wheeler, P., Garvey, S., Morvan, H. (2015). Electromagnetic launch systems for civil aircraft assisted take-off. Archives of Electrical Engineering, 64 (4), 535–546. https://doi.org/10.1515/aee-2015-0039
- Kloesel, K., Sayles, E., Wright, M., Marriott, D., Kuznetsov, S., Holland, L., Pickrel, J. (2009). First Stage of a Highly Reliable Reusable Launch System. AIAA SPACE 2009 Conference & Exposition. https://doi.org/10.2514/6.2009-6805
- Yi, Z., Heping, W. (2006). A study of structure weight estimating for high altitude long endurence (hale) unmanned aerial vehicle (UAV). ICAS-Secretariat-25th Congr. Int. Counc. Aeronaut. Sci. Available at: https://www.icas.org/icas_archive/ICAS2006/PAPERS/019.PDF
- Yanko, A., Krasnobayev, V., Martynenko, A. (2023). Influence of the number system in residual classes on the fault tolerance of the computer system. Radioelectronic and Computer Systems, 3, 159–172. https://doi.org/10.32620/reks.2023.3.13
- Ruban, I., Volk, M., Filimonchuk, T., Ivanisenko, I., Risukhin, M., Romanenkov, Y. (2018). The Method for Ensuring the Survivability of Distributed Computing in Heterogeneous Computer Systems. 2018 International Scientific-Practical Conference Problems of Infocommunications. Science and Technology (PIC S&T), 233–237. https://doi.org/10.1109/infocommst.2018.8632099
- Ponochovniy, Y., Bulba, E., Yanko, A., Hozbenko, E. (2018). Influence of diagnostics errors on safety: Indicators and requirements. 2018 IEEE 9th International Conference on Dependable Systems, Services and Technologies (DESSERT), 53–57. https://doi.org/10.1109/dessert.2018.8409098
- Alsaidi, B., Joe, W. Y., Akbar, M. (2019). Computational Analysis of 3D Lattice Structures for Skin in Real-Scale Camber Morphing Aircraft. Aerospace, 6 (7), 79. https://doi.org/10.3390/aerospace6070079
- Onyshchenko, S., Zhyvylo, Y., Hlushko, A., Bilko, S. (2024). Cyber risk management technology to strengthen the information security of the national economy. Naukovyi Visnyk Natsionalnoho Hirnychoho Universytetu, 5, 136–142. https://doi.org/10.33271/nvngu/2024-5/136
- Semenov, S., Jian, Y., Jiang, H., Chernykh, O., Binkovska, A. (2025). Mathematical model of intelligent UAV flight path planning. Advanced Information Systems, 9 (1), 49–61. https://doi.org/10.20998/2522-9052.2025.1.06
- Hrubel, M., Kraynyk, L., Mikhalieva, M., Zalypka, V., Manziak, M., Khoma, V. et al. (2024). Improving a methodology for estimating the cross-country ability of all-wheel-drive vehicles. Eastern-European Journal of Enterprise Technologies, 2 (1 (128)), 64–72. https://doi.org/10.15587/1729-4061.2024.302833
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Nazar Pedchenko, Alina Yanko, Oleksandr Laktionov, Bohdan Boriak

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.






