Minimization of ships' passing path in the field of risks
DOI:
https://doi.org/10.15587/2706-5448.2023.276419Keywords:
risk field, optimal passing, gradient procedure, minimization of passing path, given risk ellipse, automatic moduleAbstract
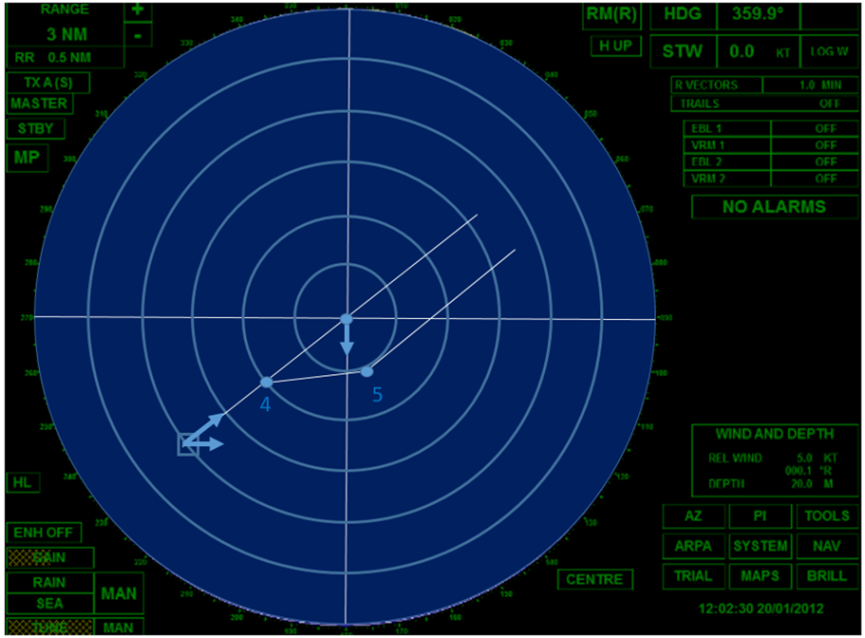
The object of research is the processes of automatic optimal passing of ships in the field of risks. ARPA (automatic radar plotting aid) is used on modern ships to track targets and pass from them. ARPA is an automated system that assumes the presence of an operator in the loop of information processing and management. Today, operator interventions in control processes are quite significant and often lead to an increase in the number of accidents and disasters. Recently, specialists have been paying more and more attention to the automation of ship control processes. The most promising direction of automation is the use of automatic control modules in automated systems. In this case, the shipmaster only decides to use the automatic module and observes its operation. An example of an automatic module in an automated system is autosteering, which has been used on ships for over 100 years.
The paper considers the method of automatic optimal passing of ships in the field of risks. The method allows to minimize the path of passing, provided that the given collision risk is not exceeded. The obtained results are explained by the use of an on-board computer for the calculation of controls. In the on-board computer, at each step of the calculation, a field of risks is built. For the position point of the ship in the field of risks, there is a field gradient and a direction of movement of the ship perpendicular to the gradient. The direction of movement of the ship at each point is tangent to the trajectory of passing – an ellipse of equal risk. The ellipse of equal risks is used as a motion program for the formation of controls that ensure the movement of the ship along the ellipse of a given risk during the passing process.
The developed method can be used for the development of automatic modules for managing the passing of ships in the field of risks.
References
- Radar navigation and ship collision avoidance. Nautical almanac. Available at: https://www.nauticalalmanac.it/en/navigation-astronomy/radar-navigation-maneuvering-board.html
- Bole, A., Wall, A., Norris, A. (2013). Radar and ARPA manual: Radar, AIS and Target Tracking for Marine Radar Users. Butterworth-Heinemann, 552. doi: https://doi.org/10.1016/c2010-0-68325-8
- Pipchenko, A. (2018). Radar Plotting or... Do we really understand what ARPA does? Available at: https://learnmarine.com/blog/Radar-Plotting-or...-Do-we-really-understand-what-ARPA-does?
- Johansen, T. A., Cristoforo, A., Perez, T. (2016). Ship Collision Avoidance Using Scenario-Based Model Predictive Control. IFAC.
- Shen, H., Hashimoto, H., Matsuda, A., Taniguchi, Y., Terada, D., Guo, C. (2019). Automatic collision avoidance of multiple ships based on deep Q-learning. Applied Ocean Research, 86, 268–288. doi: https://doi.org/10.1016/j.apor.2019.02.020
- Huang, Y., Chen, L., van Gelder, P. H. A. J. M. (2019). Generalized velocity obstacle algorithm for preventing ship collisions at sea. Ocean Engineering, 173, 142–156. doi: https://doi.org/10.1016/j.oceaneng.2018.12.053
- Lisowski, J. (2004). Multi-step matrix game with the risk of ship collision, Risk Analysis IV, Wit Press. Computational Mechanics Publications: Southampton and Boston, 669–680.
- Lisowski, J. (2004). The multistage positional game of process decision in marine collision situations. Proc. of the XV International Conference on Systems Science. Wroclaw, 1–10.
- Hua, J., Yan, X., Liu, W., Shi, C. (2018). Risk function of collision between ships based on ship domain. Journal of Marine Science and Engineering, 6 (4), 124.
- Mamenko, P., Zinchenko, S., Kobets, V., Nosov, P., Popovych, I.; Babichev, S., Lytvynenko, V. (Eds.) (2021). Solution of the Problem of Optimizing Route with Using the Risk Criterion. Lecture Notes on Data Engineering and Communications Technologies. Cham: Springer, 77, 252–265. doi: https://doi.org/10.1007/978-3-030-82014-5_17
- Zinchenko, S. M., Mateichuk, V. M., Nosov, P. S., Popovych, I. S., Appazov, E. S. (2020). Improving the accuracy of automatic control with mathematical meter model in on-board controller. Radio Electronics, Computer Science, Control, 4, 197–207. doi: https://doi.org/10.15588/1607-3274-2020-4-19
- Niu, H., Lu, Y., Savvaris, A., Tsourdos, A. (2016). Efficient Path Planning Algorithms for Unmanned Surface Vehicle. IFAC-PapersOnLine, 49 (23), 121–126. doi: https://doi.org/10.1016/j.ifacol.2016.10.331
- Huang, Y., Chen, L., Negenborn, R. R., van Gelder, P. H. A. J. M. (2020). A ship collision avoidance system for human-machine cooperation during collision avoidance. Ocean Engineering, 217, 107913. doi: https://doi.org/10.1016/j.oceaneng.2020.107913
- Huang, Y., Chen, L., Chen, P., Negenborn, R. R., van Gelder, P. H. A. J. M. (2020). Ship collision avoidance methods: State-of-the-art. Safety Science, 121, 451–473. doi: https://doi.org/10.1016/j.ssci.2019.09.018
- Zinchenko, S., Mamenko, P., Grosheva, O., Mateychuk, V. (2019). Automatic control of the vessel’s movement under external conditions. Scientific Bulletin Kherson State Maritime Academy, 2 (21), 10–15. doi: https://doi.org/10.33815/2313-4763.2019.2.21.010-015
- Zinchenko, S., Nosov, P., Mateichuk, V., Mamenko, P., Grosheva, O., Popovych, I. (2019). Automatic collision avoidance system with many targets, including maneuvering ones. Bulletin of the Karaganda University. “Physics” Series, 96 (4), 69–79. doi: https://doi.org/10.31489/2019ph4/69-79
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Pavlo Mamenko

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.





