Мінімізація шляху розходження суден у полі ризиків
DOI:
https://doi.org/10.15587/2706-5448.2023.276419Ключові слова:
поле ризиків, оптимальне розходження, градієнтна процедура, мінімізація шляху розходження, еліпс заданого ризику, автоматичний модульАнотація
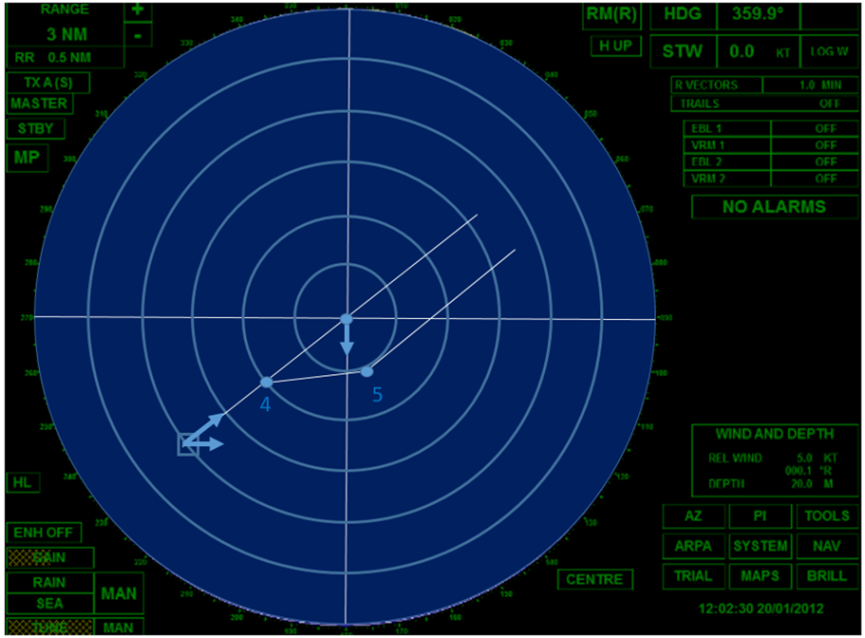
Об’єктом дослідження є процеси автоматичного оптимального розходження суден у полі ризиків. На сучасних суднах, для супроводження цілей та розходження з ними, використовується ARPA (automatic radar plotting aid). ARPA є автоматизованою системою, яка передбачає наявність оператора у контурі обробки інформації та управління. На сьогоднішній день втручання оператора у процеси керування досить значні та часто ведуть до збільшення кількості аварій та катастроф. Останнім часом спеціалісти все більше уваги звертають на автоматизацію процесів керування судном. Найбільш перспективним напрямком автоматизації є застосування автоматичних модулів керування у автоматизованих системах. У цьому випадку судноводій лише приймає рішення про використання автоматичного модуля та спостерігає за його роботою. Прикладом автоматичного модуля у автоматизованій системі є авторульовий, який використовується на суднах вже більше 100 років.
У роботі розглянуто метод автоматичного оптимального розходження суден у полі ризиків. Метод дозволяє мінімізувати шлях розходження, за умови не перевищення заданого ризику зіткнення. Отримані результати пояснюються використанням бортового обчислювача для розрахунку керувань. У бортовому обчислювачі, на кожному кроці обчислення, будується поле ризиків. Для точки положення судна у полі ризиків знаходиться градієнт поля та напрямок руху судна, перпендикулярний градієнту. Напрямку руху судна у кожній точці є дотичними до траєкторії розходження – еліпсу рівного ризику. Еліпс рівних ризиків використовується як програма руху для формування керувань, що забезпечують рух судна по еліпсу заданого ризику у процесі розходження.
Розроблений метод може використовуватися для розробки автоматичних модулів керування розходженням суден у полі ризиків.
Посилання
- Radar navigation and ship collision avoidance. Nautical almanac. Available at: https://www.nauticalalmanac.it/en/navigation-astronomy/radar-navigation-maneuvering-board.html
- Bole, A., Wall, A., Norris, A. (2013). Radar and ARPA manual: Radar, AIS and Target Tracking for Marine Radar Users. Butterworth-Heinemann, 552. doi: https://doi.org/10.1016/c2010-0-68325-8
- Pipchenko, A. (2018). Radar Plotting or... Do we really understand what ARPA does? Available at: https://learnmarine.com/blog/Radar-Plotting-or...-Do-we-really-understand-what-ARPA-does?
- Johansen, T. A., Cristoforo, A., Perez, T. (2016). Ship Collision Avoidance Using Scenario-Based Model Predictive Control. IFAC.
- Shen, H., Hashimoto, H., Matsuda, A., Taniguchi, Y., Terada, D., Guo, C. (2019). Automatic collision avoidance of multiple ships based on deep Q-learning. Applied Ocean Research, 86, 268–288. doi: https://doi.org/10.1016/j.apor.2019.02.020
- Huang, Y., Chen, L., van Gelder, P. H. A. J. M. (2019). Generalized velocity obstacle algorithm for preventing ship collisions at sea. Ocean Engineering, 173, 142–156. doi: https://doi.org/10.1016/j.oceaneng.2018.12.053
- Lisowski, J. (2004). Multi-step matrix game with the risk of ship collision, Risk Analysis IV, Wit Press. Computational Mechanics Publications: Southampton and Boston, 669–680.
- Lisowski, J. (2004). The multistage positional game of process decision in marine collision situations. Proc. of the XV International Conference on Systems Science. Wroclaw, 1–10.
- Hua, J., Yan, X., Liu, W., Shi, C. (2018). Risk function of collision between ships based on ship domain. Journal of Marine Science and Engineering, 6 (4), 124.
- Mamenko, P., Zinchenko, S., Kobets, V., Nosov, P., Popovych, I.; Babichev, S., Lytvynenko, V. (Eds.) (2021). Solution of the Problem of Optimizing Route with Using the Risk Criterion. Lecture Notes on Data Engineering and Communications Technologies. Cham: Springer, 77, 252–265. doi: https://doi.org/10.1007/978-3-030-82014-5_17
- Zinchenko, S. M., Mateichuk, V. M., Nosov, P. S., Popovych, I. S., Appazov, E. S. (2020). Improving the accuracy of automatic control with mathematical meter model in on-board controller. Radio Electronics, Computer Science, Control, 4, 197–207. doi: https://doi.org/10.15588/1607-3274-2020-4-19
- Niu, H., Lu, Y., Savvaris, A., Tsourdos, A. (2016). Efficient Path Planning Algorithms for Unmanned Surface Vehicle. IFAC-PapersOnLine, 49 (23), 121–126. doi: https://doi.org/10.1016/j.ifacol.2016.10.331
- Huang, Y., Chen, L., Negenborn, R. R., van Gelder, P. H. A. J. M. (2020). A ship collision avoidance system for human-machine cooperation during collision avoidance. Ocean Engineering, 217, 107913. doi: https://doi.org/10.1016/j.oceaneng.2020.107913
- Huang, Y., Chen, L., Chen, P., Negenborn, R. R., van Gelder, P. H. A. J. M. (2020). Ship collision avoidance methods: State-of-the-art. Safety Science, 121, 451–473. doi: https://doi.org/10.1016/j.ssci.2019.09.018
- Zinchenko, S., Mamenko, P., Grosheva, O., Mateychuk, V. (2019). Automatic control of the vessel’s movement under external conditions. Scientific Bulletin Kherson State Maritime Academy, 2 (21), 10–15. doi: https://doi.org/10.33815/2313-4763.2019.2.21.010-015
- Zinchenko, S., Nosov, P., Mateichuk, V., Mamenko, P., Grosheva, O., Popovych, I. (2019). Automatic collision avoidance system with many targets, including maneuvering ones. Bulletin of the Karaganda University. “Physics” Series, 96 (4), 69–79. doi: https://doi.org/10.31489/2019ph4/69-79
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2023 Pavlo Mamenko

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.






