FANET management process simulation at the deployment and operation stage
DOI:
https://doi.org/10.15587/2706-5448.2023.290033Keywords:
ground-to-air communication network, FANET, objective functions, deployment phase, operational management, prediction, dynamic topologyAbstract
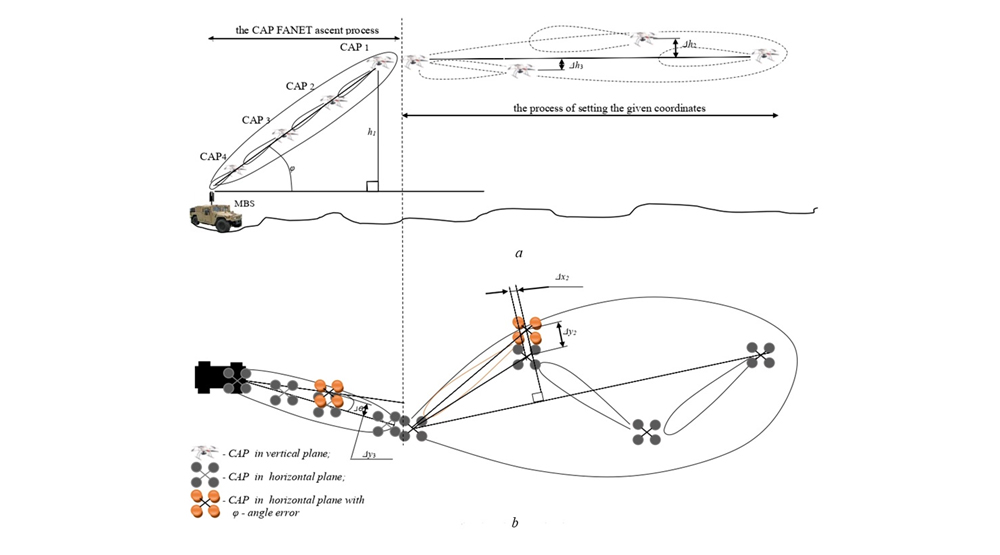
The object of the study is the process of managing the air network of air communication platforms of the FANET class (Flying Ad-Hoc Network), which is a component of the ground-air communication network, and which is performed on rotary unmanned aerial vehicles (UAVs) of the mini class, at the stage of deployment and operational management. The scientific research is aimed at the managing process formalization of aerial communication platforms of the air communication network in the implementation of two classes of management tasks – the class of traffic management tasks and the class of communication tasks. The analysis of this subject area showed that the management tasks at the stage of deployment and operational management of the air subnet are a multi-parameter optimization task and require the formation of control solutions at the OSI physical, channel and network levels, open systems interaction model. Tasks related to the adaptive management of radio coverage in zones (geographic areas of the area), including the clustering of terrestrial subscribers (communication nodes), were not considered, and relate to processes at the transport and application levels. At the same time, the article shows the mathematical apparatus of the approach to the compensation of the deviations of the trajectory of an unmanned aerial vehicle (UAV) in the conditions of a directional obstacle, which will allow the formation of control solutions for adaptive control, directional patterns at the output of the transmission path. Such compensation is carried out using methods of algorithmic exchange of probes (messages) between the mobile base station and communication platforms with a certain periodicity – solutions at the channel and network levels, as well as the use of Multi User MIMO technologies. This technology allows for information exchange with several client devices at the same time, and not sequentially, sending probes to several spacecraft on one channel, using several transmitting and receiving antennas, and the calculation of channel coefficients allows to estimate the azimuthal angle of deviation and the angle of elevation.
References
- Dakov, S., Dakova, L. (2019). Improving the reliability of software-defined network. Information Systems and Technologies Security, 1 (1), 66–78. doi: https://doi.org/10.17721/ists.2019.1.66-78
- Thamizhmaran, K. (2020). Performance of Mobile Ad-Hoc Network. Journal of VLSI Design and Signal Processing, 6 (2), 22–25. doi: https://doi.org/10.46610/jovdsp.2020.v06i02.005
- Bieliakov, R., Fesenko, O. (2023). Mobility model of a special purpose terrestrial communication network. Computer-integrated technologies: education, science, production, 51, 130–138. doi: https://doi.org/10.36910/6775-2524-0560-2023-51-17
- Romaniuk, V. A., Bieliakov, R. О. (2023). Objective control functions of FANET communication nodes of land-air network. Computer-integrated technologies: education, science, production, 50, 125–130. doi: https://doi.org/10.36910/6775-2524-0560-2023-50-19
- Menna, B., Villar, S., Acosta, G. (2019). Navigation System for MACÁBOT an Autonomous Surface Vehicles Using GPS Aided Strapdown Inertial Navigation System. IEEE Latin America Transactions, 17 (6), 1009–1019. doi: https://doi.org/10.1109/tla.2019.8896824
- Munguía, R. (2014). A GPS-aided inertial navigation system in direct configuration. Journal of Applied Research and Technology, 12 (4), 803–814. doi: https://doi.org/10.1016/s1665-6423(14)70096-3
- Bieliakov, R. O., Radzivilov, H. D., Fesenko, O. D., Vasylchenko, V. V., Tsaturian, O. G., Shyshatskyi, A. V., Romanenko, V. P. (2019). Method of the intelligent system construction of automatic control of unmanned aircraft apparatus. Radio Electronics, Computer Science, Control, 1. doi: https://doi.org/10.15588/1607-3274-2019-1-20
- Delamer, J.-A., Watanabe, Y., Chanel, C. P. C. (2021). Safe path planning for UAV urban operation under GNSS signal occlusion risk. Robotics and Autonomous Systems, 142, 103800. doi: https://doi.org/10.1016/j.robot.2021.103800
- Li, Q., Li, K., Liang, W. (2023). A zero-velocity update method based on neural network and Kalman filter for vehicle-mounted inertial navigation system. Measurement Science and Technology, 34 (4), 045110. doi: https://doi.org/10.1088/1361-6501/acabde
- Bi, S., Ma, L., Shen, T., Xu, Y., Li, F. (2021). Neural network assisted Kalman filter for INS/UWB integrated seamless quadrotor localization. PeerJ Computer Science, 7, e630. doi: https://doi.org/10.7717/peerj-cs.630
- Park, K.-S., Kim, S.-H., Guerra Padilla, G. E., Kim, K.-J., Yu, K.-H. (2018). Operational Performance Evaluation of Remote Controllers for Manual Control of UAV. Journal of Institute of Control, Robotics and Systems, 24 (4), 315–320. doi: https://doi.org/10.5302/j.icros.2018.18.8001
- Nguyen, M. D., Le, L. B., Girard, A. (2022). Integrated UAV Trajectory Control and Resource Allocation for UAV-Based Wireless Networks With Co-Channel Interference Management. IEEE Internet of Things Journal, 9 (14), 12754–12769. doi: https://doi.org/10.1109/jiot.2021.3138374
- Khan, M. A., Qureshi, I. M., Khan, I. U., Nasim, A., Javed, U., Khan, W. (2018). On the Performance of Flying Ad-hoc Networks (FANETs) with Directional Antennas. 2018 5th International Multi-Topic ICT Conference (IMTIC). doi: https://doi.org/10.1109/imtic.2018.8467274
- Zhang, L., Tao, C., Yang, G. (2011). Wireless Positioning: Fundamentals, Systems and State of the Art Signal Processing Techniques. Cellular Networks – Positioning, Performance Analysis, Reliability. doi: https://doi.org/10.5772/14841
- Fakharian, A., Gustafsson, T., Mehrfam, M. (2011). Adaptive Kalman filtering based navigation: An IMU/GPS integration approach. 2011 International Conference on Networking, Sensing and Control. doi: https://doi.org/10.1109/icnsc.2011.5874871
- Li, J., Zhang, X. (2014). Two-dimensional angle estimation for monostatic MIMO arbitrary array with velocity receive sensors and unknown locations. Digital Signal Processing, 24, 34–41. doi: https://doi.org/10.1016/j.dsp.2013.08.005
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Robert Bieliakov, Oleksii Fesenko

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.






