Моделювання процесу управління FANET на етапі розгортання та оперативного управління
DOI:
https://doi.org/10.15587/2706-5448.2023.290033Ключові слова:
наземно-повітряна комунікаційна мережа, FANET, цільові функції, етап розгортання, оперативне управління, оптимізація, прогнозування, динамічна топологіяАнотація
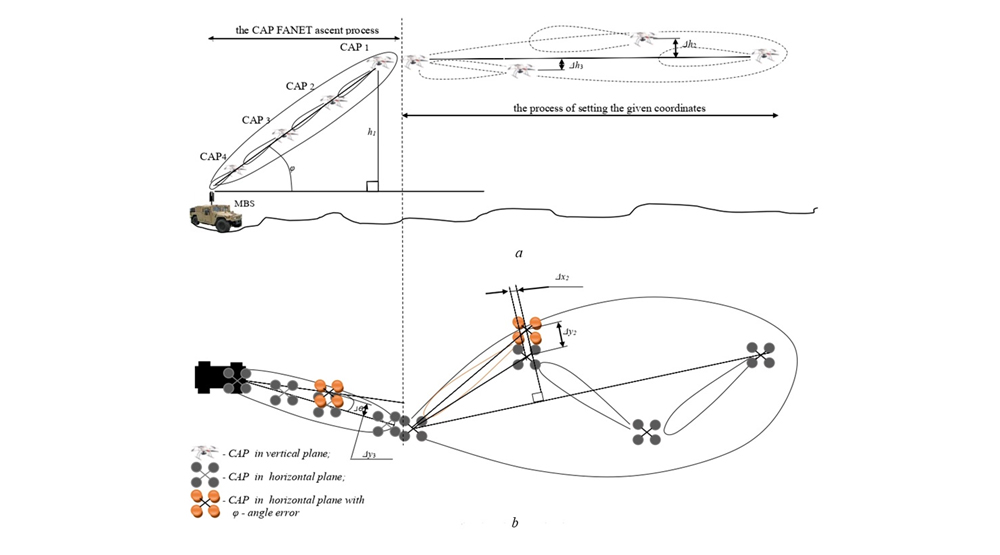
Об’єктом дослідження є процес керування повітряною мережею комунікаційних аероплатформ класу FANET (Flying Ad-Hoc Network), що є складовою наземно-повітряної комунікаційної мережі, і виконаної на безпілотних літальних апаратах (БПЛА) роторного типу класу міні, на етапі розгортання та оперативного управління. Дослідження направлене на формалізацію процесу управління комунікаційними аероплатформами повітряної комунікаційної мережі під час реалізації задач управління двох класів – класу задач управління переміщенням та класу комунікаційних задач. Проведений аналіз даної предметної області показав, що задачі управління на етапі розгортання та оперативного управління повітряною підмережою являють собою багатопараметричну оптимізаційну задачу, і вимагають формування управляючих рішень на фізичному, канальному та мережевому рівні моделі взаємодії відкритих систем OSI. Задачі, що пов’язані із адаптивним управлінням радіопокриття в зонах (географічних районах місцевості), в тому числі кластеризації наземних абонентів (комунікаційних вузлів) не розглядались, і стосуються процесів на транспортному та прикладному рівнях. Разом з тим, в роботі показано математичний апарат підходу компенсації відхилень траєкторії польоту КА (БПЛА) в умовах направлених завад, при цьому це дозволить сформувати управляючі рішення для адаптивного управління діаграмою направленості на виході передаючого тракту. Така компенсація здійснюється за рахунок прийомів алгоритмічного обміну зондами (повідомленнями) між мобільною базовою станцією та комунікаційними аероплатформами з певною періодичністю – рішення на канальному та мережевому рівні, та використання технологій Multi User MIMO. Ця технологія дозволяє забезпечити інформаційний обмін з кількома клієнтськими пристроями одночасно, а не послідовно, шляхом відправки зондів до кількох КА по одному каналу, використовуючи кілька передавальних та приймальних антен, а розрахунок канальних коефіцієнтів дозволяє здійснити оцінку азимутального та елеваційного кутів відхилення.
Посилання
- Dakov, S., Dakova, L. (2019). Improving the reliability of software-defined network. Information Systems and Technologies Security, 1 (1), 66–78. doi: https://doi.org/10.17721/ists.2019.1.66-78
- Thamizhmaran, K. (2020). Performance of Mobile Ad-Hoc Network. Journal of VLSI Design and Signal Processing, 6 (2), 22–25. doi: https://doi.org/10.46610/jovdsp.2020.v06i02.005
- Bieliakov, R., Fesenko, O. (2023). Mobility model of a special purpose terrestrial communication network. Computer-integrated technologies: education, science, production, 51, 130–138. doi: https://doi.org/10.36910/6775-2524-0560-2023-51-17
- Romaniuk, V. A., Bieliakov, R. О. (2023). Objective control functions of FANET communication nodes of land-air network. Computer-integrated technologies: education, science, production, 50, 125–130. doi: https://doi.org/10.36910/6775-2524-0560-2023-50-19
- Menna, B., Villar, S., Acosta, G. (2019). Navigation System for MACÁBOT an Autonomous Surface Vehicles Using GPS Aided Strapdown Inertial Navigation System. IEEE Latin America Transactions, 17 (6), 1009–1019. doi: https://doi.org/10.1109/tla.2019.8896824
- Munguía, R. (2014). A GPS-aided inertial navigation system in direct configuration. Journal of Applied Research and Technology, 12 (4), 803–814. doi: https://doi.org/10.1016/s1665-6423(14)70096-3
- Bieliakov, R. O., Radzivilov, H. D., Fesenko, O. D., Vasylchenko, V. V., Tsaturian, O. G., Shyshatskyi, A. V., Romanenko, V. P. (2019). Method of the intelligent system construction of automatic control of unmanned aircraft apparatus. Radio Electronics, Computer Science, Control, 1. doi: https://doi.org/10.15588/1607-3274-2019-1-20
- Delamer, J.-A., Watanabe, Y., Chanel, C. P. C. (2021). Safe path planning for UAV urban operation under GNSS signal occlusion risk. Robotics and Autonomous Systems, 142, 103800. doi: https://doi.org/10.1016/j.robot.2021.103800
- Li, Q., Li, K., Liang, W. (2023). A zero-velocity update method based on neural network and Kalman filter for vehicle-mounted inertial navigation system. Measurement Science and Technology, 34 (4), 045110. doi: https://doi.org/10.1088/1361-6501/acabde
- Bi, S., Ma, L., Shen, T., Xu, Y., Li, F. (2021). Neural network assisted Kalman filter for INS/UWB integrated seamless quadrotor localization. PeerJ Computer Science, 7, e630. doi: https://doi.org/10.7717/peerj-cs.630
- Park, K.-S., Kim, S.-H., Guerra Padilla, G. E., Kim, K.-J., Yu, K.-H. (2018). Operational Performance Evaluation of Remote Controllers for Manual Control of UAV. Journal of Institute of Control, Robotics and Systems, 24 (4), 315–320. doi: https://doi.org/10.5302/j.icros.2018.18.8001
- Nguyen, M. D., Le, L. B., Girard, A. (2022). Integrated UAV Trajectory Control and Resource Allocation for UAV-Based Wireless Networks With Co-Channel Interference Management. IEEE Internet of Things Journal, 9 (14), 12754–12769. doi: https://doi.org/10.1109/jiot.2021.3138374
- Khan, M. A., Qureshi, I. M., Khan, I. U., Nasim, A., Javed, U., Khan, W. (2018). On the Performance of Flying Ad-hoc Networks (FANETs) with Directional Antennas. 2018 5th International Multi-Topic ICT Conference (IMTIC). doi: https://doi.org/10.1109/imtic.2018.8467274
- Zhang, L., Tao, C., Yang, G. (2011). Wireless Positioning: Fundamentals, Systems and State of the Art Signal Processing Techniques. Cellular Networks – Positioning, Performance Analysis, Reliability. doi: https://doi.org/10.5772/14841
- Fakharian, A., Gustafsson, T., Mehrfam, M. (2011). Adaptive Kalman filtering based navigation: An IMU/GPS integration approach. 2011 International Conference on Networking, Sensing and Control. doi: https://doi.org/10.1109/icnsc.2011.5874871
- Li, J., Zhang, X. (2014). Two-dimensional angle estimation for monostatic MIMO arbitrary array with velocity receive sensors and unknown locations. Digital Signal Processing, 24, 34–41. doi: https://doi.org/10.1016/j.dsp.2013.08.005
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2023 Robert Bieliakov, Oleksii Fesenko

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.






