Research of microprocessor device and software for remote control of a robotic system
DOI:
https://doi.org/10.15587/2706-5448.2024.297339Keywords:
robotic systems, IoT, microcontrollers, wireless communication channels, remote control, S.BUS, ESP32, FreeRTOSAbstract
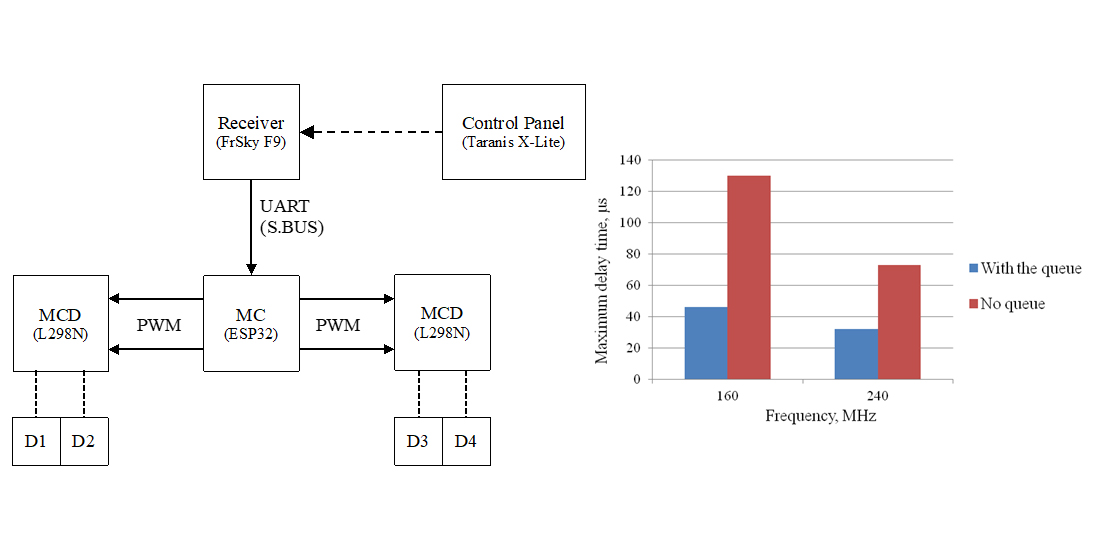
The modern stage of the development of intelligent robotic systems is characterized by the expansion of fields of application, which is due to autonomous work and decision-making in conditions of uncertainty. The object of research is the system of remote control of robotic systems. During the remote control of robotic systems, problems arise that are associated with the use of wireless communication in real time. The article analyzes software and hardware implementations of various remote control systems suitable for use as part of autonomous robotic systems and analyzes promising microcontroller platforms for implementing a remote control device for a robotic system. A brief review of existing protocols for transmitting control signals using radio communication equipment and microprocessor platforms for the development of embedded systems is performed, among which a solution is selected for research. Several approaches to the control of a robotic system are highlighted – control using a wired connection and corresponding protocols, control via wireless communication or via the Internet, control via general-purpose network protocols. The target platform is chosen and justified, and the S.BUS protocol is analyzed with the provision of an algorithm for obtaining the values of the control channels from the S.BUS package. The structure and algorithm of functioning of the microprocessor remote control system based on the ESP32 microcontroller and the FreeRTOS OS are given. A study of the operation process of the proposed remote control system is carried out, for which it is placed on the chassis of a ground autonomous robotic system with four-wheel drive, and the delay time of the control signal from the receiver to the engine control modules is determined. According to the conducted analysis, the expediency of using specialized radio communication equipment with the S.BUS protocol for controlling executive devices as part of a robotic system, for precise movement control in real time, is shown.
References
- Chen, L., Dong, X., Sun, Y., Su, Z. (2019). Real-time Image Transmission and Operation Control for Power Transmission Line Patrol using Unmanned Aerial Vehicle. 25th International Conference on Electricity Distribution. Madrid, 3–6 June 2019. Paper No. 488. doi: https://doi.org/10.34890/79
- Shafique, K., Khawaja, B. A., Sabir, F., Qazi, S., Mustaqim, M. (2020). Internet of Things (IoT) for Next-Generation Smart Systems: A Review of Current Challenges, Future Trends and Prospects for Emerging 5G-IoT Scenarios. IEEE Access, 8, 23022–23040. doi: https://doi.org/10.1109/access.2020.2970118
- Bonarini, A., Matteucci, M., Migliavacca, M., Rizzi, D. (2014). R2P: An open source hardware and software modular approach to robot prototyping. Robotics and Autonomous Systems, 62 (7), 1073–1084. doi: https://doi.org/10.1016/j.robot.2013.08.009
- Cederberg, P., Olsson, M., Bolmsjö, G. (2002). Virtual triangulation sensor development, behavior simulation and CAR integration applied to robotic arc-welding. Journal of Intelligent and Robotic Systems, 35, 365–379. doi: https://doi.org/10.1023/a:1022306821640
- Bolmsjö, G., Cederberg, P., Olsson, M. (2002). Remote Control of a Standard ABB Robot System in Real Time Using the Robot Application Protocol (RAP). Proceedings of the 33rd ISR (International Symposium on Robotics). Stockholm.
- Duong, P. M., Hoang, T. T., Vinh, T. Q. (2010). Control of an Internet-based Robot System Using the Real-time Transport Protocol. Proc of the 5th Vietnam Conference on Mechatronics. doi: https://doi.org/10.48550/arXiv.1707.05456
- Migliavacca, M., Bonarini, A., Matteucci, M. (2013). RTCAN: a Real-Time CAN-Bus Protocol for Robotic Applications. Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), 353–360. doi: https://doi.org/10.5220/0004484303530360
- Ishak, K. A., Ishak, M. K., Roslan, M. I. (2018). Design of Robotic Arm Controller based on Internet of Things (IoT). Journal of Telecommunication, Electronic and Computer Engineering, 10 (2-3), 5–9.
- Grocholsky, B., Bayraktar, S., Kumar, V., Taylor, C. J., Pappas, G.; Ang, M. H., Khatib, O. (Eds.) (2006). Synergies in Feature Localization by Air-Ground Robot Teams. Experimental Robotics IX. Springer Tracts in Advanced Robotics. Vol. 21. Berlin, Heidelberg: Springer, 352–361. doi: https://doi.org/10.1007/1155224634
- ESP32 Technical Reference Manual. Version 5.0 Espressif Systems (2023). Available at: https://www.espressif.com/sites/default/files/documentation/esp32technical_reference_manual_en.pdf
- ESP32 Series Datasheet. Version 4.3 Espressif Systems (2023). Available at: https://www.espressif.com/sites/default/files/documentation/esp32_datasheet_en.pdf
- Maier, A., Sharp, A., Vagapov, Y. (2017). Comparative analysis and practical implementation of the ESP32 microcontroller module for the internet of things. 2017 Internet Technologies and Applications (ITA). IEEE: Piscataway, 143–148. doi: https://doi.org/10.1109/itecha.2017.8101926
- Hangan, A., Chiru, C.-G., Arsene, D., Czako, Z., Lisman, D. F., Mocanu, M., Pahontu, B., Predescu, A., Sebestyen, G. (2022). Advanced Techniques for Monitoring and Management of Urban Water Infrastructures – An Overview. Water, 14 (14), 2174. doi: https://doi.org/10.3390/w14142174
- Allafi, I., Iqbal, T. (2017). Design and implementation of a low cost web server using ESP32 for real-time photovoltaic system monitoring. 2017 IEEE Electrical Power and Energy Conference (EPEC). IEEE: Piscataway. doi: https://doi.org/10.1109/epec.2017.8286184
- Carducci, C. G. C., Monti, A., Schraven, M. H., Schumacher, M., Mueller, D. (2019). Enabling ESP32-based IoT Applications in Building Automation Systems. 2019 II Workshop on Metrology for Industry 4.0 and IoT (MetroInd4.0&IoT). IEEE: Piscataway, 306–311. doi: https://doi.org/10.1109/metroi4.2019.8792852
- Taştan, M., Gökozan, H. (2019). Real-Time Monitoring of Indoor Air Quality with Internet of Things-Based E-Nose. Applied Sciences, 9 (16), 3435. doi: https://doi.org/10.3390/app9163435
- FreeRTOS. Available at: https://docs.espressif.com/projects/esp-idf/en/latest/esp32/api-reference/system/freertos.html Last accessed: 15.11.2022
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2024 Andrii Zuiev, Viktoriia Krylova, Anatolii Hapon, Stanislav Honcharov

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.





