Дослідження мікропроцесорного пристрою та програмного забезпечення системи дистанційного керування робототехнічною системою
DOI:
https://doi.org/10.15587/2706-5448.2024.297339Ключові слова:
робототехнічні системи, IoT, мікроконтролерні засоби, бездротові канали зв'язку, дистанційне керування, S.BUS, ESP32, FreeRTOSАнотація
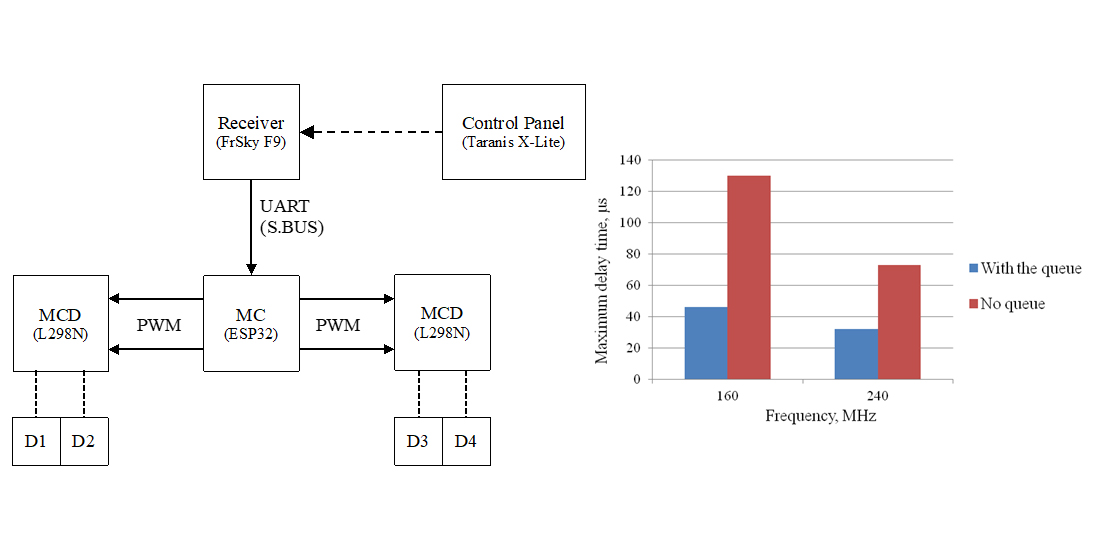
Сучасний етап розвитку інтелектуальних роботехнічних систем характеризується розширенням галузей застосування, що обумовлено автономною роботою та прийняття рішення в умовах невизначеності. Об’єктом дослідження є система дистанційного керування роботехнічними системами. Під час дистанційного керування роботехнічними системами виникають проблеми, які пов’язані з використанням бездротового зв'язку в реальному масштабі часу. У статті проведено аналіз програмно-апаратних реалізацій різних систем дистанційного керування, придатних для використання в складі автономних робототехнічних систем та аналіз перспективних мікроконтролерних платформ для реалізації пристрою дистанційного керування робототехнічною системою. Виконано короткий огляд існуючих протоколів передачі сигналів керування за допомогою апаратури радіозв’язку та мікропроцесорних платформ для розробки вбудованих систем, серед яких обрано рішення для проведення досліджень. Було виділено декілька підходів до керування робототехнічною системою – керування за допомогою дротового з'єднання та відповідних протоколів, керування за бездротовим зв'язком або через Інтернет, керування через мережеві протоколи загального призначення. Здійснено вибір та обґрунтування цільової платформи та виконано аналіз протоколу S.BUS з наданням алгоритму отримання значень каналів керування з пакету S.BUS. Наведено структуру та алгоритм функціонування мікропроцесорної системи дистанційного керування на основі мікроконтролеру ESP32 та ОС FreeRTOS. Проведено дослідження процесу функціонування запропонованої системи дистанційного керування, для чого вона була розміщена на шасі наземної автономної робототехнічної системи з чотирьох колісним ходом, та встановлено час затримки надходження сигналу керування від приймача до модулів керування двигунами. Відповідно до проведеного аналізу показано доцільність використання спеціалізованої апаратури радіозв'язку з протоколом S.BUS для керування виконуючими пристроями у складі робототехнічної системи, для точного контролю руху у реальному масштабі часу.
Посилання
- Chen, L., Dong, X., Sun, Y., Su, Z. (2019). Real-time Image Transmission and Operation Control for Power Transmission Line Patrol using Unmanned Aerial Vehicle. 25th International Conference on Electricity Distribution. Madrid, 3–6 June 2019. Paper No. 488. doi: https://doi.org/10.34890/79
- Shafique, K., Khawaja, B. A., Sabir, F., Qazi, S., Mustaqim, M. (2020). Internet of Things (IoT) for Next-Generation Smart Systems: A Review of Current Challenges, Future Trends and Prospects for Emerging 5G-IoT Scenarios. IEEE Access, 8, 23022–23040. doi: https://doi.org/10.1109/access.2020.2970118
- Bonarini, A., Matteucci, M., Migliavacca, M., Rizzi, D. (2014). R2P: An open source hardware and software modular approach to robot prototyping. Robotics and Autonomous Systems, 62 (7), 1073–1084. doi: https://doi.org/10.1016/j.robot.2013.08.009
- Cederberg, P., Olsson, M., Bolmsjö, G. (2002). Virtual triangulation sensor development, behavior simulation and CAR integration applied to robotic arc-welding. Journal of Intelligent and Robotic Systems, 35, 365–379. doi: https://doi.org/10.1023/a:1022306821640
- Bolmsjö, G., Cederberg, P., Olsson, M. (2002). Remote Control of a Standard ABB Robot System in Real Time Using the Robot Application Protocol (RAP). Proceedings of the 33rd ISR (International Symposium on Robotics). Stockholm.
- Duong, P. M., Hoang, T. T., Vinh, T. Q. (2010). Control of an Internet-based Robot System Using the Real-time Transport Protocol. Proc of the 5th Vietnam Conference on Mechatronics. doi: https://doi.org/10.48550/arXiv.1707.05456
- Migliavacca, M., Bonarini, A., Matteucci, M. (2013). RTCAN: a Real-Time CAN-Bus Protocol for Robotic Applications. Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), 353–360. doi: https://doi.org/10.5220/0004484303530360
- Ishak, K. A., Ishak, M. K., Roslan, M. I. (2018). Design of Robotic Arm Controller based on Internet of Things (IoT). Journal of Telecommunication, Electronic and Computer Engineering, 10 (2-3), 5–9.
- Grocholsky, B., Bayraktar, S., Kumar, V., Taylor, C. J., Pappas, G.; Ang, M. H., Khatib, O. (Eds.) (2006). Synergies in Feature Localization by Air-Ground Robot Teams. Experimental Robotics IX. Springer Tracts in Advanced Robotics. Vol. 21. Berlin, Heidelberg: Springer, 352–361. doi: https://doi.org/10.1007/1155224634
- ESP32 Technical Reference Manual. Version 5.0 Espressif Systems (2023). Available at: https://www.espressif.com/sites/default/files/documentation/esp32technical_reference_manual_en.pdf
- ESP32 Series Datasheet. Version 4.3 Espressif Systems (2023). Available at: https://www.espressif.com/sites/default/files/documentation/esp32_datasheet_en.pdf
- Maier, A., Sharp, A., Vagapov, Y. (2017). Comparative analysis and practical implementation of the ESP32 microcontroller module for the internet of things. 2017 Internet Technologies and Applications (ITA). IEEE: Piscataway, 143–148. doi: https://doi.org/10.1109/itecha.2017.8101926
- Hangan, A., Chiru, C.-G., Arsene, D., Czako, Z., Lisman, D. F., Mocanu, M., Pahontu, B., Predescu, A., Sebestyen, G. (2022). Advanced Techniques for Monitoring and Management of Urban Water Infrastructures – An Overview. Water, 14 (14), 2174. doi: https://doi.org/10.3390/w14142174
- Allafi, I., Iqbal, T. (2017). Design and implementation of a low cost web server using ESP32 for real-time photovoltaic system monitoring. 2017 IEEE Electrical Power and Energy Conference (EPEC). IEEE: Piscataway. doi: https://doi.org/10.1109/epec.2017.8286184
- Carducci, C. G. C., Monti, A., Schraven, M. H., Schumacher, M., Mueller, D. (2019). Enabling ESP32-based IoT Applications in Building Automation Systems. 2019 II Workshop on Metrology for Industry 4.0 and IoT (MetroInd4.0&IoT). IEEE: Piscataway, 306–311. doi: https://doi.org/10.1109/metroi4.2019.8792852
- Taştan, M., Gökozan, H. (2019). Real-Time Monitoring of Indoor Air Quality with Internet of Things-Based E-Nose. Applied Sciences, 9 (16), 3435. doi: https://doi.org/10.3390/app9163435
- FreeRTOS. Available at: https://docs.espressif.com/projects/esp-idf/en/latest/esp32/api-reference/system/freertos.html Last accessed: 15.11.2022
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2024 Andrii Zuiev, Viktoriia Krylova, Anatolii Hapon, Stanislav Honcharov

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.






