Development of a grip force recognition system based on EMG signals and neural networks
DOI:
https://doi.org/10.15587/2706-5448.2025.334613Keywords:
electromyography, prosthetics, training, neural network, sensor, vibration, feedback, capture, control, managementAbstract
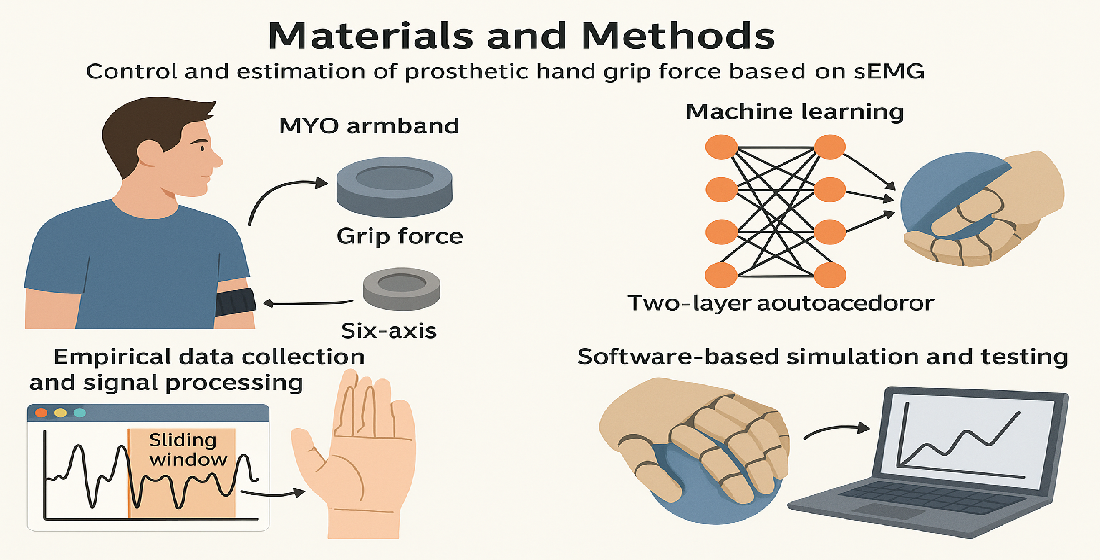
The object of research is a bionic prosthesis control system that uses EMG signals read using the MYO bracelet, as well as feedback sensors to determine the grip force. In the context of the development of modern bioengineering and neurotechnology, this system is aimed at ensuring accurate and adaptive control of the prosthetic hand, taking into account the user's intentions.
The problem considered in the research is to recognize the grip force of a bionic hand based on EMG signals and transmit feedback to the user. Special attention is paid to the use of a deep neural network for classifying force levels and developing a real-time signal processing technique. The task is to create a stable and user-friendly grip control system.
The essence of the results obtained is to create an experimental system that classifies the grip force of objects with a bionic hand with high accuracy (95%). The system is based on a neural network with a two-layer autoencoder, trained on labeled and unlabeled data. To improve the accuracy of the model, the temporal characteristics of EMG signals were used: MAV, RMS, SD and WL.
The results are explained by effective biosignal processing and machine learning. The division of force into 8 levels and the use of a fuzzy controller ensured stable control of the grip and the transfer of information to the user via vibration feedback. The system was successfully tested in real time.
The innovation lies in the integration of the MYO bracelet, force sensor and FSR with deep learning. This provides accurate force classification and natural feedback, which increases controllability and ease of use.
The use of the system provides new opportunities in prosthetics: it more accurately conveys the user's intentions, reduces errors and increases comfort. The results have the potential for clinical implementation to improve modern prostheses.
References
- Ghorbani Siavashani, A., Yousefi-Koma, A., Vedadi, A. (2023). Estimation and early prediction of grip force based on sEMG signals and deep recurrent neural networks. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 45 (5). https://doi.org/10.1007/s40430-023-04070-8
- Rahimi, F., Badamchizadeh, M. A., Sîmpetru, R. C., Ghaemi, S., Eskofier, B. M., Vecchio, A. D. (2024). Simultaneous Control of Human Hand Joint Positions and Grip Force via HD-EMG and Deep Learning. https://doi.org/10.48550/arXiv.2410.23986
- Samek, W., Montavon, G., Lapuschkin, S., Anders, C. J., Muller, K.-R. (2021). Explaining Deep Neural Networks and Beyond: A Review of Methods and Applications. Proceedings of the IEEE, 109 (3), 247–278. https://doi.org/10.1109/jproc.2021.3060483
- Cai, Z., Qu, M., Han, M., Wu, Z., Wu, T., Liu, M., Yu, H. (2024). Prediction and Fitting of Nonlinear Dynamic Grip Force of the Human Upper Limb Based on Surface Electromyographic Signals. Sensors, 25 (1), 13. https://doi.org/10.3390/s25010013
- Mao, H., Fang, P., Zheng, Y., Tian, L., Li, X., Wang, P. et al. (2023). Continuous grip force estimation from surface electromyography using generalized regression neural network. Technology and Health Care, 31 (2), 675–689. https://doi.org/10.3233/thc-220283
- Wang, M., Zhao, C., Barr, A., Fan, H., Yu, S., Kapellusch, J., Harris Adamson, C. (2021). Hand Posture and Force Estimation Using Surface Electromyography and an Artificial Neural Network. Human Factors: The Journal of the Human Factors and Ergonomics Society, 65 (3), 382–402. https://doi.org/10.1177/00187208211016695
- Xu, B., Zhang, K., Yang, X., Liu, D., Hu, C., Li, H., Song, A. (2022). Natural grasping movement recognition and force estimation using electromyography. Frontiers in Neuroscience, 16. https://doi.org/10.3389/fnins.2022.1020086
- Sittiruk, T., Sengchuai, K., Booranawong, A., Neranon, P., Phukpattaranont, P. (2024). Force estimation for human–robot interaction using electromyogram signals from varied arm postures. EURASIP Journal on Advances in Signal Processing, 2024 (1). https://doi.org/10.1186/s13634-024-01183-7
- Barański, R., Wojnicz, W., Zagrodny, B., Ludwicki, M., Sobierajska-Rek, A. (2024). Towards hand grip force assessment by using EMG estimators. Measurement, 226, 114137. https://doi.org/10.1016/j.measurement.2024.114137
- Lin, C., Chen, C., Cui, Z., Zhu, X. (2024). A Bi-GRU-attention neural network to identify motor units from high-density surface electromyographic signals in real time. Frontiers in Neuroscience, 18. https://doi.org/10.3389/fnins.2024.1306054
- Abood, J., Sameer Mohammed, A., Ismaeel, S., Hassan, M. (2024). Predicting hand grip force based on muscle electromyographic activity using artificial intelligence and neural networks. International Journal of Disabilities Sports and Health Sciences. https://doi.org/10.33438/ijdshs.1423907
- Raj, R. G., Fox, M. R., Narayanan, R. M. (2021). Target Classification in Synthetic Aperture Radar Images Using Quantized Wavelet Scattering Networks. Sensors, 21 (15), 4981. https://doi.org/10.3390/s21154981
- Vu, P. P., Vaskov, A. K., Lee, C., Jillala, R. R., Wallace, D. M., Davis, A. J. et al. (2023). Long-term upper-extremity prosthetic control using regenerative peripheral nerve interfaces and implanted EMG electrodes. Journal of Neural Engineering, 20 (2), 026039. https://doi.org/10.1088/1741-2552/accb0c
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Anton Pastushenko

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.






