Розробка системи розпізнавання сили захоплення на основі EMG-сигналів та нейронних мереж
DOI:
https://doi.org/10.15587/2706-5448.2025.334613Ключові слова:
електроміографія, протезування, навчання, нейромережа, датчик, вібрація, зворотний, захоплення, контроль, керуванняАнотація
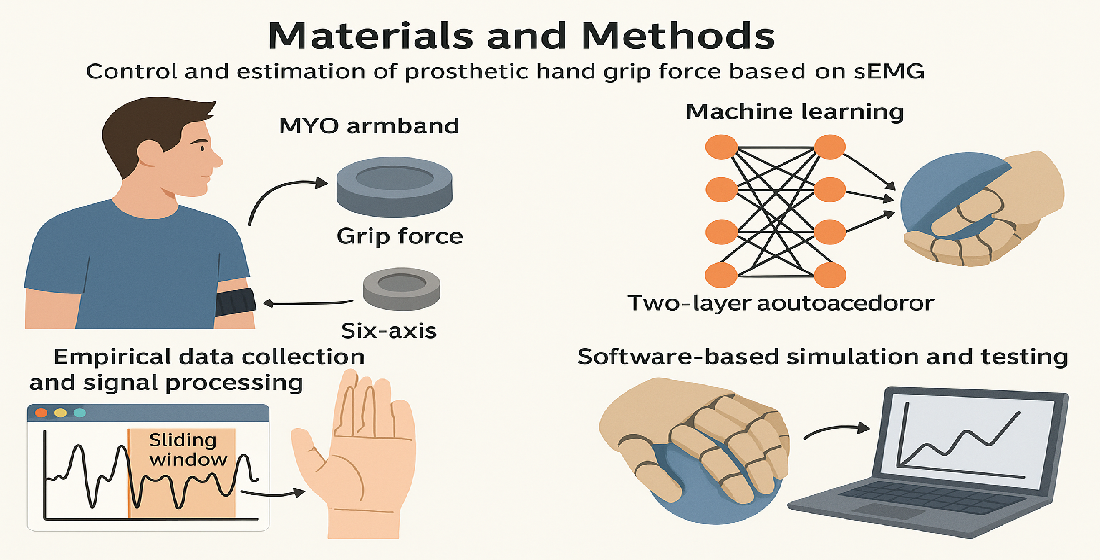
Об’єктом дослідження є система керування біонічним протезом, яка використовує ЕМГ-сигнали, зчитані за допомогою браслета MYO, а також сенсори зворотного зв’язку для визначення сили захоплення. У контексті розвитку сучасної біоінженерії та нейротехнологій дана система спрямована на забезпечення точного й адаптивного управління протезною рукою з урахуванням намірів користувача.
Проблема, що розглядається у дослідженні, полягає в розпізнаванні сили захоплення біонічною кистю на основі ЕМГ-сигналів та передачі зворотного зв’язку користувачу. Особлива увага приділяється застосуванню глибинної нейронної мережі для класифікації рівнів сили та розробці методики обробки сигналів у реальному часі. Завданням є створення стабільної та зручної у використанні системи управління захопленням.
Суть отриманих результатів полягає у створенні експериментальної системи, яка з високою точністю (95%) класифікує силу стискання об’єктів біонічною рукою. Система базується на нейронній мережі з двошаровим автокодером, навченої на маркованих і немаркованих даних. Для підвищення точності моделі використано часові характеристики ЕМГ-сигналів: MAV, RMS, SD та WL.
Результати пояснюються ефективною обробкою біосигналів і машинним навчанням. Поділ сили на 8 рівнів і використання нечіткого контролера забезпечили стабільне керування захопленням та передачу інформації користувачу через вібраційний зворотний зв’язок. Система успішно протестована в реальному часі.
Інноваційність полягає в інтеграції браслета MYO, силового датчика й FSR із глибинним навчанням. Це забезпечує точну класифікацію сили та природний зворотний зв’язок, що підвищує керованість і зручність користування.
Застосування системи дає нові можливості у протезуванні: точніше передає наміри користувача, знижує помилки й підвищує комфорт. Результати мають потенціал клінічного впровадження для покращення сучасних протезів.
Посилання
- Ghorbani Siavashani, A., Yousefi-Koma, A., Vedadi, A. (2023). Estimation and early prediction of grip force based on sEMG signals and deep recurrent neural networks. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 45 (5). https://doi.org/10.1007/s40430-023-04070-8
- Rahimi, F., Badamchizadeh, M. A., Sîmpetru, R. C., Ghaemi, S., Eskofier, B. M., Vecchio, A. D. (2024). Simultaneous Control of Human Hand Joint Positions and Grip Force via HD-EMG and Deep Learning. https://doi.org/10.48550/arXiv.2410.23986
- Samek, W., Montavon, G., Lapuschkin, S., Anders, C. J., Muller, K.-R. (2021). Explaining Deep Neural Networks and Beyond: A Review of Methods and Applications. Proceedings of the IEEE, 109 (3), 247–278. https://doi.org/10.1109/jproc.2021.3060483
- Cai, Z., Qu, M., Han, M., Wu, Z., Wu, T., Liu, M., Yu, H. (2024). Prediction and Fitting of Nonlinear Dynamic Grip Force of the Human Upper Limb Based on Surface Electromyographic Signals. Sensors, 25 (1), 13. https://doi.org/10.3390/s25010013
- Mao, H., Fang, P., Zheng, Y., Tian, L., Li, X., Wang, P. et al. (2023). Continuous grip force estimation from surface electromyography using generalized regression neural network. Technology and Health Care, 31 (2), 675–689. https://doi.org/10.3233/thc-220283
- Wang, M., Zhao, C., Barr, A., Fan, H., Yu, S., Kapellusch, J., Harris Adamson, C. (2021). Hand Posture and Force Estimation Using Surface Electromyography and an Artificial Neural Network. Human Factors: The Journal of the Human Factors and Ergonomics Society, 65 (3), 382–402. https://doi.org/10.1177/00187208211016695
- Xu, B., Zhang, K., Yang, X., Liu, D., Hu, C., Li, H., Song, A. (2022). Natural grasping movement recognition and force estimation using electromyography. Frontiers in Neuroscience, 16. https://doi.org/10.3389/fnins.2022.1020086
- Sittiruk, T., Sengchuai, K., Booranawong, A., Neranon, P., Phukpattaranont, P. (2024). Force estimation for human–robot interaction using electromyogram signals from varied arm postures. EURASIP Journal on Advances in Signal Processing, 2024 (1). https://doi.org/10.1186/s13634-024-01183-7
- Barański, R., Wojnicz, W., Zagrodny, B., Ludwicki, M., Sobierajska-Rek, A. (2024). Towards hand grip force assessment by using EMG estimators. Measurement, 226, 114137. https://doi.org/10.1016/j.measurement.2024.114137
- Lin, C., Chen, C., Cui, Z., Zhu, X. (2024). A Bi-GRU-attention neural network to identify motor units from high-density surface electromyographic signals in real time. Frontiers in Neuroscience, 18. https://doi.org/10.3389/fnins.2024.1306054
- Abood, J., Sameer Mohammed, A., Ismaeel, S., Hassan, M. (2024). Predicting hand grip force based on muscle electromyographic activity using artificial intelligence and neural networks. International Journal of Disabilities Sports and Health Sciences. https://doi.org/10.33438/ijdshs.1423907
- Raj, R. G., Fox, M. R., Narayanan, R. M. (2021). Target Classification in Synthetic Aperture Radar Images Using Quantized Wavelet Scattering Networks. Sensors, 21 (15), 4981. https://doi.org/10.3390/s21154981
- Vu, P. P., Vaskov, A. K., Lee, C., Jillala, R. R., Wallace, D. M., Davis, A. J. et al. (2023). Long-term upper-extremity prosthetic control using regenerative peripheral nerve interfaces and implanted EMG electrodes. Journal of Neural Engineering, 20 (2), 026039. https://doi.org/10.1088/1741-2552/accb0c
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2025 Anton Pastushenko

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.






