Development of a hardware-software system for gesture recognition based on electro-impedance, electromyographic, and force-myographic signals
DOI:
https://doi.org/10.15587/2706-5448.2025.340600Keywords:
bionic manipulators, control, electrical impedance, electromyography, force myography, signals, analysis, proportional, anthropomorphicAbstract
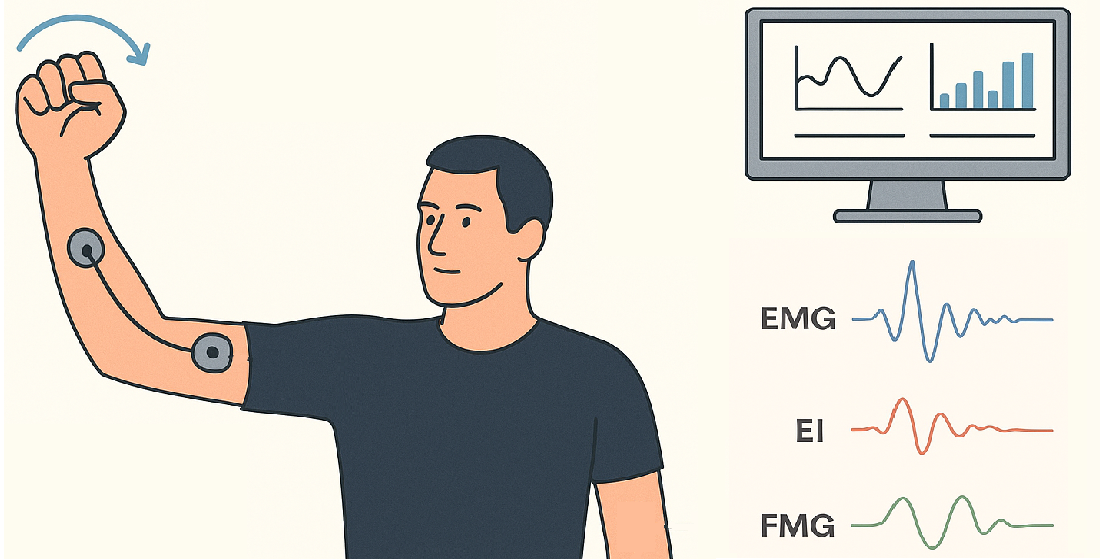
The object of the research is the process of gesture recognition and proportional assessment of muscle activity using electromyographic (EMG), electroimpedance (EI), and force myographic (FMG) signals. The subject of the research is methods and means of collecting and analyzing these signals to increase the accuracy of gesture recognition and assessment of muscle activity in real time.
The research is aimed at developing an integrated hardware and software system for collecting and analyzing EMG, EI, and FMG signals for gesture recognition and proportional assessment of muscle activity.
The problem that needs to be solved is the lack of reliable multimodal platforms capable of providing simultaneous acquisition, filtering, and digital processing of biosignals of various natures in real time. Existing solutions are limited to one or two modalities, are characterized by low noise immunity, and require complex equipment, which complicates practical use.
The proposed solution is based on the use of Ag/AgCl surface electrodes, piezoelectric and capacitive sensors in combination with multi-channel ADCs. Optimized filtering and amplification, digital processing and synchronization of signals, as well as data transfer via USB or UART to a personal computer, are implemented. The software performs frequency analysis based on the fast Fourier transform, visualization, and export of results.
Experimental studies have confirmed that the obtained signals correlate with motor activity: an increase in grip strength is accompanied by an increase in the amplitudes of FMG and EI, which allows for proportional control. The choice of optimal filtering frequencies, gain coefficients, and methods of sensor mounting made it possible to minimize noise and distortion, and the use of multi-channel ADCs ensured the processing of large volumes of data online.
The innovation of the development lies in the integration of bioelectrical and mechanical channels into a single multi-channel platform with support for up to 8 channels, high spatial and temporal resolution, and flexible architecture. This ensures high reliability and practical applicability of the system in rehabilitation, diagnostics, and control of bionic devices.
References
- Manoilenko, O. P., Kalinina, K. R., Lebedenko, Yu. O., Didyk, M. A. (2023). Intelligent control systems of COBOT-TYPE mechatronic systems using ML technologies. Technologies and Engineering, 6 (17), 31–40. https://doi.org/10.30857/2786-5371.2023.6.3
- Pavlenko, T. I., Shylo, N. Yu. (2019). Analysis of collaborative robots. Avtomatyzatsiia ta pryladobuduvannia. Kharkiv: KhNURE, 179–182. Available at: http://openarchive.nure.ua/handle/document/10312
- Dvorakevych, A. O., Gurayevskyi, A. A., Stasyshyn, A. R., Gurayevskyi, A.-D. A., Shevchuk, D. V., Kalinchuk, O. O. (2022). The first experience of using robot-assisted surgery in childhood in Ukraine. Paediatric Surgery (Ukraine), 4 (77), 91–95. https://doi.org/10.15574/ps.2022.77.91
- Shahsavari, H., Matourypour, P., Ghiyasvandian, S., Ghorbani, A., Bakhshi, F., Mahmoudi, M. et al. (2020). Upper limb amputation; Care needs for reintegration to life: An integrative review. International Journal of Orthopaedic and Trauma Nursing, 38, 100773. https://doi.org/10.1016/j.ijotn.2020.100773
- Park, S., Meeker, C., Weber, L. M., Bishop, L., Stein, J., Ciocarlie, M. (2019). Multimodal Sensing and Interaction for a Robotic Hand Orthosis. IEEE Robotics and Automation Letters, 4 (2), 315–322. https://doi.org/10.1109/lra.2018.2890199
- Kusche, R., Ryschka, M. (2019). Combining Bioimpedance and EMG Measurements for Reliable Muscle Contraction Detection. IEEE Sensors Journal, 19 (23), 11687–11696. https://doi.org/10.1109/jsen.2019.2936171
- Mao, H., Fang, P., Li, G. (2021). Simultaneous estimation of multi-finger forces by surface electromyography and accelerometry signals. Biomedical Signal Processing and Control, 70, 103005. https://doi.org/10.1016/j.bspc.2021.103005
- Olsson, A. E., Malešević, N., Björkman, A., Antfolk, C. (2021). Learning regularized representations of categorically labelled surface EMG enables simultaneous and proportional myoelectric control. Journal of NeuroEngineering and Rehabilitation, 18 (1). https://doi.org/10.1186/s12984-021-00832-4
- Chen, C., Yu, Y., Ma, S., Sheng, X., Lin, C., Farina, D. et al. (2020). Hand gesture recognition based on motor unit spike trains decoded from high-density electromyography. Biomedical Signal Processing and Control, 55, 101637. https://doi.org/10.1016/j.bspc.2019.101637
- Del Vecchio, A., Holobar, A., Falla, D., Felici, F., Enoka, R. M., Farina, D. (2020). Tutorial: Analysis of motor unit discharge characteristics from high-density surface EMG signals. Journal of Electromyography and Kinesiology, 53, 102426. https://doi.org/10.1016/j.jelekin.2020.102426
- Al-Harosh, M. B., Shchukin, S. I. (2017). Peripheral vein detection using electrical impedance method. Journal of Electrical Bioimpedance, 8 (1), 79–83. https://doi.org/10.5617/jeb.4560
- Xiao, Z. G., Menon, C. (2019). A Review of Force Myography Research and Development. Sensors, 19 (20), 4557. https://doi.org/10.3390/s19204557
- Belyea, A., Englehart, K., Scheme, E. (2019). FMG Versus EMG: A Comparison of Usability for Real-Time Pattern Recognition Based Control. IEEE Transactions on Biomedical Engineering, 66 (11), 3098–3104. https://doi.org/10.1109/tbme.2019.2900415
- Ha, N., Withanachchi, G. P., Yihun, Y. (2019). Performance of Forearm FMG for Estimating Hand Gestures and Prosthetic Hand Control. Journal of Bionic Engineering, 16 (1), 88–98. https://doi.org/10.1007/s42235-019-0009-4
- Ebied, A., Kinney-Lang, E., Escudero, J. (2021). Higher order tensor decomposition for proportional myoelectric control based on muscle synergies. Biomedical Signal Processing and Control, 67, 102523. https://doi.org/10.1016/j.bspc.2021.102523
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Anton Pastushenko

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.






