Розробка апаратно-програмної системи розпізнавання жестів на основі електроімпедансних, електроміографічних та форсміографічних сигналів
DOI:
https://doi.org/10.15587/2706-5448.2025.340600Ключові слова:
біонічні маніпулятори, керування, електроімпедансна, електроміографія, механоміографія, сигнали, аналіз, пропорційне, антропоморфнеАнотація
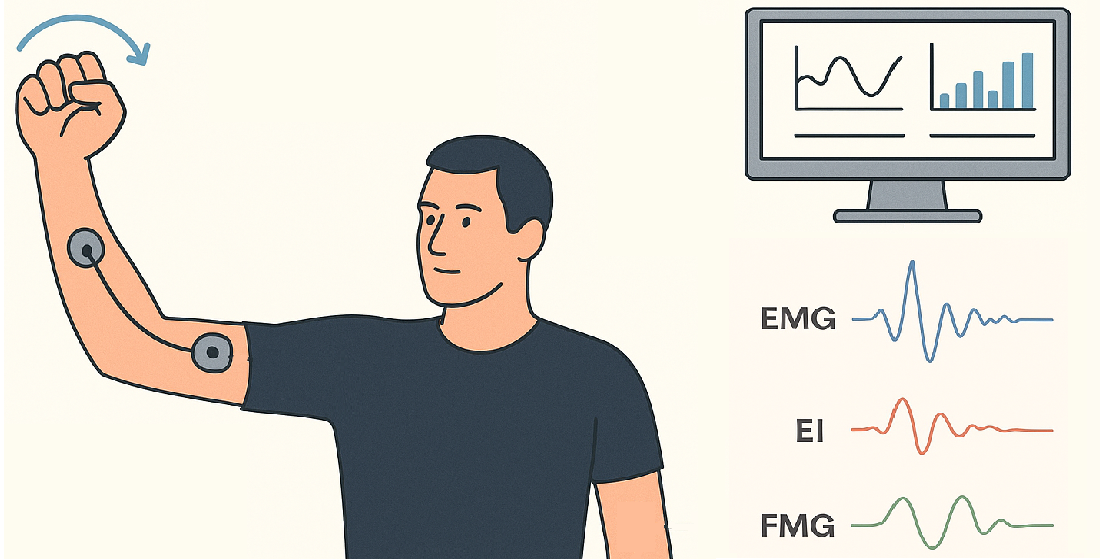
Об’єкт дослідження – процес розпізнавання жестів та пропорційної оцінки м’язової активності за електроміографічними (ЕМГ), електроімпедансними (ЕІ) та форсміографічними (ФМГ) сигналами. Предмет дослідження – методи та засоби збору й аналізу цих сигналів для підвищення точності розпізнавання жестів і оцінки м’язової активності в реальному часі.
Дослідження направлене на розроблення інтегрованої апаратно-програмної системи збору та аналізу ЕМГ, ЕІ та ФМГ сигналів для розпізнавання жестів і пропорційної оцінки м’язової активності.
Проблема, що потребувала вирішення, полягає у відсутності надійних мультимодальних платформ, здатних забезпечити одночасне отримання, фільтрацію та цифрову обробку біосигналів різної природи в режимі реального часу. Існуючі рішення обмежені однією або двома модальностями, характеризуються низькою завадостійкістю та потребують складної апаратури, що ускладнює практичне використання.
Запропоноване рішення базується на використанні поверхневих електродів Ag/AgCl, п’єзоелектричних і ємнісних сенсорів у поєднанні з багатоканальними АЦП. Реалізовано оптимізовану фільтрацію й підсилення, цифрову обробку та синхронізацію сигналів, а також передачу даних через USB або UART на персональний комп’ютер. Програмне забезпечення виконує частотний аналіз на основі швидкого перетворення Фур’є, візуалізацію та експорт результатів.
Експериментальні дослідження підтвердили, що отримані сигнали корелюють із руховою активністю: зростання сили захвату супроводжується підвищенням амплітуд ФМГ та ЕІ, що дозволяє реалізувати пропорційне керування. Вибір оптимальних частот фільтрації, коефіцієнтів підсилення та способів кріплення сенсорів дозволив мінімізувати шум і спотворення, а використання багатоканальних АЦП забезпечило обробку великих обсягів даних у режимі онлайн.
Інноваційність розробки полягає в інтеграції біоелектричних та механічних каналів у єдину багатоканальну платформу з підтримкою до 8 каналів, високою просторовою й часовою роздільністю та гнучкою архітектурою. Це забезпечує високу надійність і практичну придатність системи у реабілітації, діагностиці та керуванні біонічними пристроями.
Посилання
- Manoilenko, O. P., Kalinina, K. R., Lebedenko, Yu. O., Didyk, M. A. (2023). Intelligent control systems of COBOT-TYPE mechatronic systems using ML technologies. Technologies and Engineering, 6 (17), 31–40. https://doi.org/10.30857/2786-5371.2023.6.3
- Pavlenko, T. I., Shylo, N. Yu. (2019). Analysis of collaborative robots. Avtomatyzatsiia ta pryladobuduvannia. Kharkiv: KhNURE, 179–182. Available at: http://openarchive.nure.ua/handle/document/10312
- Dvorakevych, A. O., Gurayevskyi, A. A., Stasyshyn, A. R., Gurayevskyi, A.-D. A., Shevchuk, D. V., Kalinchuk, O. O. (2022). The first experience of using robot-assisted surgery in childhood in Ukraine. Paediatric Surgery (Ukraine), 4 (77), 91–95. https://doi.org/10.15574/ps.2022.77.91
- Shahsavari, H., Matourypour, P., Ghiyasvandian, S., Ghorbani, A., Bakhshi, F., Mahmoudi, M. et al. (2020). Upper limb amputation; Care needs for reintegration to life: An integrative review. International Journal of Orthopaedic and Trauma Nursing, 38, 100773. https://doi.org/10.1016/j.ijotn.2020.100773
- Park, S., Meeker, C., Weber, L. M., Bishop, L., Stein, J., Ciocarlie, M. (2019). Multimodal Sensing and Interaction for a Robotic Hand Orthosis. IEEE Robotics and Automation Letters, 4 (2), 315–322. https://doi.org/10.1109/lra.2018.2890199
- Kusche, R., Ryschka, M. (2019). Combining Bioimpedance and EMG Measurements for Reliable Muscle Contraction Detection. IEEE Sensors Journal, 19 (23), 11687–11696. https://doi.org/10.1109/jsen.2019.2936171
- Mao, H., Fang, P., Li, G. (2021). Simultaneous estimation of multi-finger forces by surface electromyography and accelerometry signals. Biomedical Signal Processing and Control, 70, 103005. https://doi.org/10.1016/j.bspc.2021.103005
- Olsson, A. E., Malešević, N., Björkman, A., Antfolk, C. (2021). Learning regularized representations of categorically labelled surface EMG enables simultaneous and proportional myoelectric control. Journal of NeuroEngineering and Rehabilitation, 18 (1). https://doi.org/10.1186/s12984-021-00832-4
- Chen, C., Yu, Y., Ma, S., Sheng, X., Lin, C., Farina, D. et al. (2020). Hand gesture recognition based on motor unit spike trains decoded from high-density electromyography. Biomedical Signal Processing and Control, 55, 101637. https://doi.org/10.1016/j.bspc.2019.101637
- Del Vecchio, A., Holobar, A., Falla, D., Felici, F., Enoka, R. M., Farina, D. (2020). Tutorial: Analysis of motor unit discharge characteristics from high-density surface EMG signals. Journal of Electromyography and Kinesiology, 53, 102426. https://doi.org/10.1016/j.jelekin.2020.102426
- Al-Harosh, M. B., Shchukin, S. I. (2017). Peripheral vein detection using electrical impedance method. Journal of Electrical Bioimpedance, 8 (1), 79–83. https://doi.org/10.5617/jeb.4560
- Xiao, Z. G., Menon, C. (2019). A Review of Force Myography Research and Development. Sensors, 19 (20), 4557. https://doi.org/10.3390/s19204557
- Belyea, A., Englehart, K., Scheme, E. (2019). FMG Versus EMG: A Comparison of Usability for Real-Time Pattern Recognition Based Control. IEEE Transactions on Biomedical Engineering, 66 (11), 3098–3104. https://doi.org/10.1109/tbme.2019.2900415
- Ha, N., Withanachchi, G. P., Yihun, Y. (2019). Performance of Forearm FMG for Estimating Hand Gestures and Prosthetic Hand Control. Journal of Bionic Engineering, 16 (1), 88–98. https://doi.org/10.1007/s42235-019-0009-4
- Ebied, A., Kinney-Lang, E., Escudero, J. (2021). Higher order tensor decomposition for proportional myoelectric control based on muscle synergies. Biomedical Signal Processing and Control, 67, 102523. https://doi.org/10.1016/j.bspc.2021.102523
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2025 Anton Pastushenko

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.






