Using redundant control to optimize control torque
DOI:
https://doi.org/10.15587/2706-5448.2023.282042Keywords:
navigation safety, human factor, intelligent vehicles, automated system, optimal controls, automatic control moduleAbstract
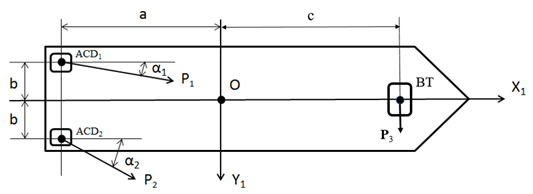
The object of research is the process of automatic control of the redundant structure of the vessel's executive devices for extreme rotation in the yaw channel. Traditionally, redundant structures have been used to improve the reliability of automated control systems and the maneuverability of vessels. At the same time, control redundancy can also be used to optimize control processes, thereby reducing fuel consumption, increasing control forces and moments, and reducing the time required to perform operations. This allows gaining advantages in movement over vessels not equipped with optimization modules. The paper considers the optimal management of the redundant structure of an offshore vessel, which ensures the rotational movement of the vessel around the center of rotation with the maximum angular velocity. As well as simultaneous maintenance of a given position or movement in the longitudinal and lateral channel, taking into account control restrictions. This problem is reduced to a nonlinear optimization problem with nonlinear and linear control constraints. The method, algorithmic and software of the module of extreme rotation of the vessel with a redundant structure of executive devices have been developed. The workability and efficiency of the developed method, algorithmic and software are verified by mathematical modeling in the closed circuit «Control Object – Control System». The results of the conducted experiment showed that the use of optimal control allows, in comparison with traditional methods of splitting controls, to increase the control moment and angular speed of rotation by 1.5–2 times. The obtained opportunities are explained by the use of a mathematical model of the redundant control structure and the optimization procedure for calculating optimal controls in the on-board computer of the automated system. The developed method can be used on vessels, provided it is integrated into the existing automated system of the on-board computer with an open architecture, to increase the capabilities of automatic traffic control.
References
- Podder, T. K., Sarkar, N. (2001). Fault-tolerant control of an autonomous underwater vehicle under thruster redundancy. Robotics and Autonomous Systems, 34 (1), 39–52. doi: https://doi.org/10.1016/s0921-8890(00)00100-7
- Zemlyakov, A. S. (2001). Control the angular position of a spacecraft with an excess gyrodin structure. Bulletin of Kazan State Technical University, 4, 56–62.
- Lebedev, D. V. (2008). Momentum unloading excessive reaction-wheel system of a spacecraft. Journal of Computer and Systems Sciences International, 47 (4), 613–620. doi: https://doi.org/10.1134/s1064230708040138
- Xue, L., Yang, B., Wang, X., Cai, G., Shan, B., Chang, H. (2023). MIMU Optimal Redundant Structure and Signal Fusion Algorithm Based on a Non-Orthogonal MEMS Inertial Sensor Array. Micromachines, 14 (4), 759. doi: https://doi.org/10.3390/mi14040759
- Chiurazzi, M., Alcaide, J. O., Diodato, A., Menciassi, A., Ciuti, G. (2023). Spherical Wrist Manipulator Local Planner for Redundant Tasks in Collaborative Environments. Sensors, 23 (2), 677. doi: https://doi.org/10.3390/s23020677
- Liu, Y., Wang, L., Yu, Y., Zhang, J., Shu, B. (2022). Optimization of redundant degree of freedom in robot milling considering chatter stability. doi: https://doi.org/10.21203/rs.3.rs-1360661/v1
- Gao, W., Tang, Q., Yao, J., Yang, Y. (2020). Automatic motion planning for complex welding problems by considering angular redundancy. Robotics and Computer-Integrated Manufacturing, 62, 101862. doi: https://doi.org/10.1016/j.rcim.2019.101862
- Navi – Trainer 5000. Transas offshore simulator (2012). Transas MIP Ltd.
- Zinchenko, S., Kobets, V., Tovstokoryi, O., Nosov, P., Popovych, I. (2023). Intelligent System Control of the Vessel Executive Devices Redundant Structure. CEUR Workshop Proceedings, 3403, 582–594.
- Serhii, Z., Oleh, T., Pavlo, N., Ihor, P., Kostiantyn, K. (2022). Pivot Point position determination and its use for manoeuvring a vessel. Ships and Offshore Structures, 18 (3), 358–364. doi: https://doi.org/10.1080/17445302.2022.2052480
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Ihor Gritsuk, Pavlo Nosov, Andrii Bondarchuk, Oleksandr Bondarchuk

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.






