Підвищення точності обробки інформації в бортових підсистемах БпЛА
DOI:
https://doi.org/10.15587/2706-5448.2023.287700Ключові слова:
LeGNSS, INS, супутники LEO, БпЛА, багатосупутникова система позиціонування, точне позиціонування, управління безпілотникамиАнотація
Об’єктом дослідження є бортові підсистеми безпілотних літальних апаратів (БпЛА). Дослідження направлене на аналіз БпЛА, а саме інтеграції та вдосконаленню супутникових систем позиціонування, включаючи глобальні навігаційні супутникові системи (GNSS) та інерціальні навігаційні системи (INS).
Проблема стосується традиційних супутникових служб позиціонування, особливо тих, які повністю залежать від супутників середньої земної орбіти (MEO), які є недостатніми для конкретних вимог. Дослідження спрямоване на вирішення обмежень цих систем в бортових підсистемах БпЛА, особливо в складних умовах, сповнених завадами та перешкодами, а також на надання більш точного, надійного та безперервного рішення щодо позиціонування.
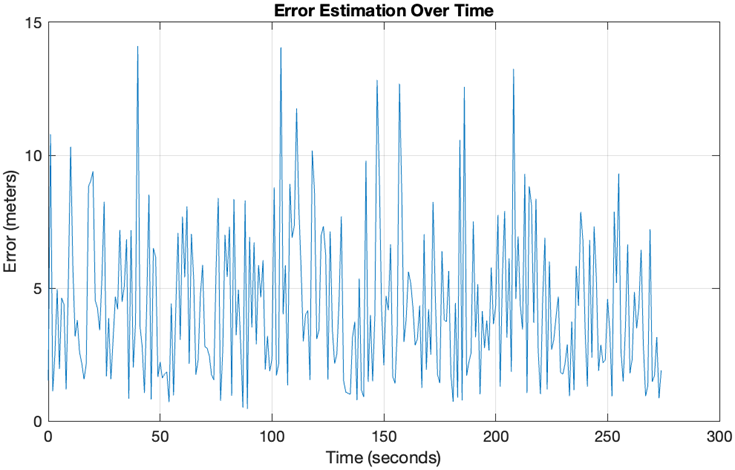
Дослідження пропонує підхід «багатошарова система систем», який інтегрує сигнали з різних джерел, включаючи супутники низької земної орбіти (LEO), наземні системи позиціонування, навігації та часу (PNT) та сенсори, орієнтовані на користувача. Комбінований підхід, який називається LeGNSS/INS, використовує переваги кожного компонента, забезпечуючи резервування та покращену точність. Продуктивність системи була оцінена за допомогою псевдо-реальних вихідних даних, демонструючи її здатність генерувати майже реальні динамічні траєкторії польотів БпЛА. Аналіз похибок показав, що запропонований метод стійко перевершує традиційні системи GNSS, особливо в складних умовах.
Покращена продуктивність системи LeGNSS/INS пов'язана з інтеграцією декількох супутникових систем з INS та застосуванням методів оптимальної фільтрації інформації. У дослідженні також використовувалося математичне моделювання для представлення залежностей та взаємодії при комбінуванні даних з різних джерел, таких як GPS, LEO та INS. Фільтр Калмана є механізмом для оптимального злиття даних з декількох джерел.
Висновки з цього дослідження застосовуються в різних секторах, включаючи авіацію, морську навігацію, автономні дрони та оборону. Покращена точність позиціонування може значно підвищити безпеку, точність навігації та оперативну ефективність. Однак дослідження припускає ідеалізовані умови для прийому сигналу супутника, які можуть не завжди бути точними в реальних умовах. Також були висвітлені виклики, такі як воєнний стан в Україні, який впливає на збір даних та потенційні обмеження сигналів супутників. Подальше дослідження може вивчати вплив більш складних навколишніх факторів та інтеграцію додаткових супутникових систем або датчиків для подальшого покращення точності.
Посилання
- Bryson, M., Sukkarieh, S. (2015). UAV Localization Using Inertial Sensors and Satellite Positioning Systems. Handbook of Unmanned Aerial Vehicles. Dordrecht: Springer, 433–460. doi: https://doi.org/10.1007/978-90-481-9707-1_3
- Won, J. H., Pany, T. (2017). Signal Processing. Springer Handbook of Global Navigation Satellite Systems. Cham: Springer, 401–442. doi: https://doi.org/10.1007/978-3-319-42928-1_14
- Elkaim, G. H., Lie, F. A. P., Gebre-Egziabher, D.; Valavanis, K., Vachtsevanos, G. (Eds.) (2015). Principles of Guidance, Navigation, and Control of UAVs. Handbook of Unmanned Aerial Vehicles. Dordrecht: Springer, 347–380. doi: https://doi.org/10.1007/978-90-481-9707-1_56
- Jardak, N., Jault, Q. (2022). The Potential of LEO Satellite-Based Opportunistic Navigation for High Dynamic Applications. Sensors, 22 (7), 2541. doi: https://doi.org/10.3390/s22072541
- Kogure, S., Ganeshan, A., Montenbruck, O.; Teunissen, P. J., Montenbruck, O. (Eds.) (2017). Regional Systems. Springer Handbook of Global Navigation Satellite Systems. Cham: Springer, 305–337. doi: https://doi.org/10.1007/978-3-319-42928-1_11
- Vasyliev, V. M., Rogozhyn, V. O., Dolintse, B. I. (2015). Integration of inertial and satellite navigation systems using corrective circuits for UAV. 2015 IEEE APUAVD. Kyiv, 193–197. doi: https://doi.org/10.1109/apuavd.2015.7346597
- Maya, D., Gallego, Z., Zaid, R., Kouedjin, K. Y., Sarri, P., Guinamard, A. (2021). Tightly Coupled Integration of Inertial Data with Multi-Constellation PPP-IF with Integer Ambiguity Resolution. Proceedings of the 34th ION GNSS+ 2021. St. Louis, 2879–2894. doi: https://doi.org/10.33012/2021.18023
- Li, T., Zhang, H., Gao, Z., Chen, Q., Niu, X. (2018). High-Accuracy Positioning in Urban Environments Using Single-Frequency Multi-GNSS RTK/MEMS-IMU Integration. Remote Sensing, 10 (2), 205. doi: https://doi.org/10.3390/rs10020205
- Reuper, B., Becker, M., Leinen, S. (2018). Benefits of Multi-Constellation/Multi-Frequency GNSS in a Tightly Coupled GNSS/IMU/Odometry Integration Algorithm. Sensors, 18 (9), 3052. doi: https://doi.org/10.3390/s18093052
- Chen, Z., Li, J., Luo, J., Cao, X. (2018). A New Strategy for Extracting ENSO Related Signals in the Troposphere and Lower Stratosphere from GNSS RO Specific Humidity Observations. Remote Sensing, 10 (4), 503. doi: https://doi.org/10.3390/rs10040503
- Zhang, P., Tu, R., Zhang, R., Gao, Y., Cai, H. (2018). Combining GPS, BeiDou, and Galileo Satellite Systems for Time and Frequency Transfer Based on Carrier Phase Observations. Remote Sensing, 10 (2), 324. doi: https://doi.org/10.3390/rs10020324
- Swaminathan, H. B., Sommer, A., Becker, A., Atzmueller, M. (2022). Performance Evaluation of GNSS Position Augmentation Methods for Autonomous Vehicles in Urban Environments. Sensors, 22 (21), 8419. doi: https://doi.org/10.3390/s22218419
- Elghamrawy, H., Karaim, M., Tamazin, M., Noureldin, A. (2020). Experimental Evaluation of the Impact of Different Types of Jamming Signals on Commercial GNSS Receivers. Applied Sciences, 10 (12), 4240. doi: https://doi.org/10.3390/app10124240
- del Portillo, I., Cameron, B. G., Crawley, E. F. (2019). A technical comparison of three low earth orbit satellite constellation systems to provide global broadband. Acta Astronautica, 159, 123–135. doi: https://doi.org/10.1016/j.actaastro.2019.03.040
- Xu, X., Wang, C., Jin, Z. (2022). An analysis method for ISL of multilayer constellation. Journal of Systems Engineering and Electronics, 33 (4), 961–968. doi: https://doi.org/10.23919/jsee.2022.000093
- Singh, L. A., Whittecar, W. R., DiPrinzio, M. D., Herman, J. D., Ferringer, M. P., Reed, P. M. (2020). Low cost satellite constellations for nearly continuous global coverage. Nature Communications, 11 (1). doi: https://doi.org/10.1038/s41467-019-13865-0
- Wang, J., Zhou, Z., Jiang, W., Cai, B., Shangguan, W.; Sun, J., Yang, C., Xie, J. (Eds.) (2020). A Multi-constellation Positioning Method Based on Optimal Stochastic Modelling. China Satellite Navigation Conference (CSNC) 2020 Proceedings: Vol. I. CSNC 2020. Lecture Notes in Electrical Engineering. Singapore: Springer, 358–367. doi: https://doi.org/10.1007/978-981-15-3707-3_34
- Tomaštík, J., Chudá, J., Tunák, D., Chudý, F., Kardoš, M. (2020). Advances in smartphone positioning in forests: dual-frequency receivers and raw GNSS data. Forestry: An International Journal of Forest Research, 94 (2), 292–310. doi: https://doi.org/10.1093/forestry/cpaa032
- Yang, Y., Liu, L., Li, J., Yang, Y., Zhang, T., Mao, Y., Sun, B., Ren, X. (2021). Featured services and performance of BDS-3. Science Bulletin, 66 (20), 2135–2143. doi: https://doi.org/10.1016/j.scib.2021.06.013
- Zhu, H., Xia, L., Wu, D., Xia, J., Li, Q. (2020). Study on Multi-GNSS Precise Point Positioning Performance with Adverse Effects of Satellite Signals on Android Smartphone. Sensors, 20 (22), 6447. doi: https://doi.org/10.3390/s20226447
- Jardak, N., Adam, R. (2023). Practical Use of Starlink Downlink Tones for Positioning. Sensors, 23 (6), 3234. doi: https://doi.org/10.3390/s23063234
- Neinavaie, M., Kassas, Z. M. (2023). Unveiling Starlink LEO Satellite OFDM-Like Signal Structure Enabling Precise Positioning. IEEE Transactions on Aerospace and Electronic Systems, 1–4. doi: https://doi.org/10.1109/taes.2023.3265951
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2023 Igor Zhukov, Bogdan Dolintse

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.







