Development of an image segmentation method from unmanned aerial vehicles based on the particle swarm optimization algorithm
DOI:
https://doi.org/10.15587/2706-5448.2025.330973Keywords:
segmentation, unmanned aerial vehicle, swarm intelligence, particle swarm algorithm, k-meansAbstract
The object of research is the process of segmenting images from an unmanned aerial vehicle based on the particle swarm algorithm.
One of the most problematic areas in segmenting images from unmanned aerial vehicles is the reduction in the efficiency of known segmentation methods. In addition, most methods do not accurately recognize small objects that occupy a small part of the image.
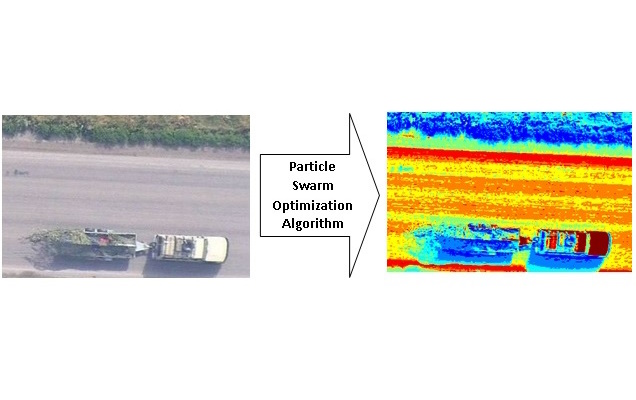
The method of segmenting images from an unmanned aerial vehicle based on the particle swarm algorithm has been improved, in which, unlike the known ones, the following is performed:
– the source image is converted to the appropriate color space;
– the channel is selected for further analysis;
– the particle swarm is initialized on the source image in each channel selected for further analysis;
– the objective function is calculated for each particle of the swarm in the image in each selected channel;
– the current value of the objective function for each particle of the swarm is compared with the best value of the objective function in the image in each selected channel;
– calculating the velocity value and new location for each swarm particle in the image;
– moving each swarm particle in the image in each selected channel;
– determining the swarm particles with the best value of the objective function in the image in each channel;
– combining the channels and forming the resulting image.
During the study, it was found that the segmented image by the improved method based on the particle swarm algorithm has better visual quality compared to the known segmentation method. It was found that the improved segmentation method based on the particle swarm algorithm provides an average reduction in segmentation errors of the I kind by 11% and an average reduction in segmentation errors of the II kind by 9%.
Supporting Agency
- The research was conducted with the grant support of the National Research Foundation of Ukraine within the framework of the competition “Science for Strengthening the Defense Capability of Ukraine”, “Information Technology for Segmenting Object Images in FPV Drone Targeting Systems Based on Swarm Intelligence Algorithms” project, registration number 2023.04/0153.
References
- Drones Vs. Satellites for the Agri-Sector Use (2025). Earth Observing System. Available at: https://eos.com/blog/drones-vs-satellites/
- Ruwaimana, M., Satyanarayana, B., Otero, V., M. Muslim, A., Syafiq A., M., Ibrahim, S. et al. (2018). The advantages of using drones over space-borne imagery in the mapping of mangrove forests. PLOS ONE, 13 (7), e0200288. https://doi.org/10.1371/journal.pone.0200288
- Lu, C., Gehring, K., Kopfinger, S., Bernhardt, H., Beck, M., Walther, S. et al. (2025). Weed instance segmentation from UAV Orthomosaic Images based on Deep Learning. Smart Agricultural Technology, 11, 100966. https://doi.org/10.1016/j.atech.2025.100966
- Sapkota, R., Ahmed, D., Karkee, M. (2024). Comparing YOLOv8 and Mask R-CNN for instance segmentation in complex orchard environments. Artificial Intelligence in Agriculture, 13, 84–99. https://doi.org/10.1016/j.aiia.2024.07.001
- Cong, P., Zhou, J., Li, S., Lv, K., Feng, H. (2022). Citrus Tree Crown Segmentation of Orchard Spraying Robot Based on RGB-D Image and Improved Mask R-CNN. Applied Sciences, 13 (1), 164. https://doi.org/10.3390/app13010164
- Li, Y., Guo, Z., Shuang, F., Zhang, M., Li, X. (2022). Key technologies of machine vision for weeding robots: A review and benchmark. Computers and Electronics in Agriculture, 196, 106880. https://doi.org/10.1016/j.compag.2022.106880
- Li, J., Wan, J., Sun, L., Hu, T., Li, X., Zheng, H. (2025). Intelligent segmentation of wildfire region and interpretation of fire front in visible light images from the viewpoint of an unmanned aerial vehicle (UAV). ISPRS Journal of Photogrammetry and Remote Sensing, 220, 473–489. https://doi.org/10.1016/j.isprsjprs.2024.12.025
- Almeida, J. S., Jagatheesaperumal, S. K., Nogueira, F. G., de Albuquerque, V. H. C. (2023). EdgeFireSmoke++: A novel lightweight algorithm for real-time forest fire detection and visualization using internet of things-human machine interface. Expert Systems with Applications, 221, 119747. https://doi.org/10.1016/j.eswa.2023.119747
- Guo, Z., Cai, D., Jin, Z., Xu, T., Yu, F. (2025). Research on unmanned aerial vehicle (UAV) rice field weed sensing image segmentation method based on CNN-transformer. Computers and Electronics in Agriculture, 229, 109719. https://doi.org/10.1016/j.compag.2024.109719
- Xiao, L., Pan, Z., Du, X., Chen, W., Qu, W., Bai, Y., Xu, T. (2023). Weighted skip-connection feature fusion: A method for augmenting UAV oriented rice panicle image segmentation. Computers and Electronics in Agriculture, 207, 107754. https://doi.org/10.1016/j.compag.2023.107754
- Yi, S., Liu, X., Li, J., Chen, L. (2023). UAVformer: A Composite Transformer Network for Urban Scene Segmentation of UAV Images. Pattern Recognition, 133, 109019. https://doi.org/10.1016/j.patcog.2022.109019
- Zhou, R., Tjahjadi, T. (2024). Colour guided ground-to-UAV fire segmentation. ISPRS Open Journal of Photogrammetry and Remote Sensing, 14, 100076. https://doi.org/10.1016/j.ophoto.2024.100076
- Gonzalez, R., Woods, R. (2017). Digital Image Processing. Prentice Hall, Upper Saddle Rever, 1192.
- Richards, J. A. (2013). Remote Sensing Digital Image Analysis. Springer Berlin Heidelberg. https://doi.org/10.1007/978-3-642-30062-2
- Barabash, O., Kyrianov, A. (2023). Development of control laws of unmanned aerial vehicles for performing group flight at the straight-line horizontal flight stage. Advanced Information Systems, 7 (4), 13–20. https://doi.org/10.20998/2522-9052.2023.4.02
- Mukhin, V., Zavgorodnii, V., Barabash, O., Mykolaichuk, R., Kornaga, Y., Zavgorodnya, A., Statkevych, V. (2020). Method of Restoring Parameters of Information Objects in a Unified Information Space Based on Computer Networks. International Journal of Computer Network and Information Security, 12 (2), 11–21. https://doi.org/10.5815/ijcnis.2020.02.02
- Ruban, I., Khudov, H., Makoveichuk, O., Khudov, V., Kalimulin, T., Glukhov, S. et al. (2022). Methods of UAVs images segmentation based on k-means and a genetic algorithm. Eastern-European Journal of Enterprise Technologies, 4 (9 (118)), 30–40. https://doi.org/10.15587/1729-4061.2022.263387
- Khudov, H., Makoveichuk, O., Kalimulin, T., Khudov, V., Shamrai, N. (2024). The method for approximating the edge detection convolutional operator using a genetic algorithm for segmentation of complex-structured images. Advanced Information Systems, 8 (4), 5–12. https://doi.org/10.20998/2522-9052.2024.4.01
- Khudov, H., Khizhnyak, I., Glukhov, S., Shamrai, N., Pavlii, V. (2024). The method for objects detection on satellite imagery based on the firefly algorithm. Advanced Information Systems, 8 (1), 5–11. https://doi.org/10.20998/2522-9052.2024.1.01
- Khudov, H., Hridasov, I., Khizhnyak, I., Yuzova, I., Solomonenko, Y. (2024). Segmentation of image from a first-person-view unmanned aerial vehicle based on a simple ant algorithm. Eastern-European Journal of Enterprise Technologies, 4 (9 (130)), 44–55. https://doi.org/10.15587/1729-4061.2024.310372
- Park, G., Park, K., Song, B., Lee, H. (2022). Analyzing Impact of Types of UAV-Derived Images on the Object-Based Classification of Land Cover in an Urban Area. Drones, 6 (3), 71. https://doi.org/10.3390/drones6030071
- Khudov, H., Makoveichuk, O., Khizhnyak, I., Oleksenko, O., Khazhanets, Y., Solomonenko, Y. et al. (2022). Devising a method for segmenting complex structured images acquired from space observation systems based on the particle swarm algorithm. Eastern-European Journal of Enterprise Technologies, 2 (9 (116)), 6–13. https://doi.org/10.15587/1729-4061.2022.255203
- Cheng, Q., Zhang, Z., Du, Y., Li, Y. (2024). Research on Particle Swarm Optimization-Based UAV Path Planning Technology in Urban Airspace. Drones, 8 (12), 701. https://doi.org/10.3390/drones8120701
- Bezkoshtovni resursy BPLA (2025). Available at: https://portalgis.pro/bpla/bezkoshtovni-resursy-bpla
- DJI Mavic 3 Pro Fly More Combo (DJI RC) (2025). Available at: https://dronestore.com.ua/shop/dji-mavic-3-pro-fly-more-combo/?srsltid=AfmBOorUTmaMaLIS4m8OHfw5R6pjOS6JU8vV7sfvJTF4yMnEArSQ-o4q
- Madushan, D. (2017). Introduction to K-means Clustering. Available at: https://medium.com/@dilekamadushan/introduction-to-k-means-clustering-7c0ebc997e00
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Hennadii Khudov, Vladyslav Khudov, Oleksandr Makoveichuk, Irina Khizhnyak, Illia Hridasov, Ihor Butko, Rostyslav Khudov, Sergey Glukhov, Nazar Shamrai, Bohdan Lisohorskyi

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.






