Особливості існуючих концепцій конструкцій безпілотних літальних апаратів мультіроторного типу та перспективи їх розвитку
DOI:
https://doi.org/10.15587/2706-5448.2025.340740Ключові слова:
наявні концепції конструкцій, безпілотні літальні апарати, мультироторний тип, перспективи розвиткуАнотація
Об’єктом дослідження є проєктування безпілотних літальних апаратів (БПЛА) мультироторного типу. Одним з найбільш проблемних місць є формування концепцій БПЛА мультироторного типу для вирішення конкретних практичних завдань.
Мультироторні БПЛА останнім часом отримали значний розвиток як у плані розробки конструкції, так і їхніх концепцій. При цьому вся сукупність ідей, технічних рішень і обґрунтувань, які визначають принципи побудови, структуру та основні характеристики майбутнього БПЛА, не розглядалася. Розробниками мультироторних БПЛА не створено їх загальної класифікації для ухвалення науково обґрунтованого проєктного рішення. Це є проблемою створення БПЛА, і її дослідженню присвячена дана робота.
Проведено аналіз наявних концепцій конструкцій БПЛА, їхнього бортового обладнання, сфер застосування, переваг і недоліків, а також можливостей модернізації з метою їх удосконалення. У ході дослідження використовувалися системний та функціонально-структурний аналізи. Здійснювався пошук усіх можливих комбінацій конструктивних варіантів і їхнє порівняння з наявними рішеннями.
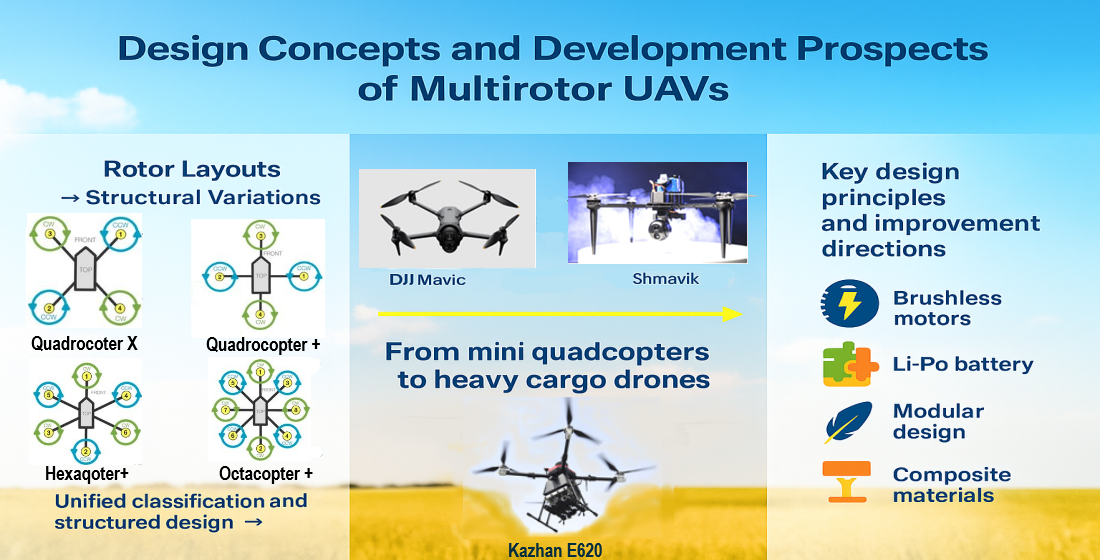
Проведено аналіз особливостей БПЛА мультироторного типу як окремого класу БПЛА та наведено докази доцільності їх виділення в окремий тип. Проведено дослідження особливостей конструкції п’яти БПЛА мультироторного типу класу міні для виконання різноманітних завдань, та чотирьох вантажних БПЛА мультироторного типу різних країн-виробників. Визначено їхні переваги та недоліки. Описано особливості елементів живлення (усі БПЛА повністю електричні, з використанням безщіткових електродвигунів) та силових установок. Розроблено рекомендації щодо проєктування БПЛА мультироторного типу.
Проведене дослідження дає розуміння концепції конструкції БПЛА мультироторного типу та може бути використане для проєктування новітніх зразків таких БПЛА, та вдосконалення вже наявних, а також стати темою перспективного напряму наукових досліджень.
Посилання
- Ukrainetc, E. A. (2008). Klassifikatciia letatelnykh apparatov boevoi i transportnoi aviatcii s uchetom radiolokatcionnoi zametnosti dlia kontceptualnykh prorabotok letno-tekhnicheskikh kharakteristik na rannikh stadiiakh proektirovaniia. Integrated Technologies and Energy Saving, 3, 114–119. Available at: https://repository.kpi.kharkov.ua/items/a8e16838-e093-41b2-a8a2-2c58b47092bf
- FAA Definitions. FAA Aircraft Certification. Available at: http://www.faa-aircraft-certification.com/faa-definitions.html
- Classification of the Unmanned Aerial System. Available at: https://www.e-education.psu.edu/geog892/node/5
- NATO STANAG 4670 Minimum training requirements for unmanned aircraft systems (UAS) operators and pilots (2019). NATO Standardization Office. Available at: https://www.scribd.com/document/731963739/ATP-3-3-8-1-EDB-V1-E-STANAG-4670
- Osnovni vlastyvosti ta modeli BpLA (multykoptery, FPV, kryla). Available at: https://vseosvita.ua/lesson/osnovni-vlastyvosti-ta-modeli-bpla-multykoptery-fpv-kryla-700086.html
- Yang, H., Lee, Y., Jeon, S.-Y., Lee, D. (2017). Multi-rotor drone tutorial: systems, mechanics, control and state estimation. Intelligent Service Robotics, 10 (2), 79–93. https://doi.org/10.1007/s11370-017-0224-y
- Mohsan, S. A. H., Othman, N. Q. H., Li, Y., Alsharif, M. H., Khan, M. A. (2023). Unmanned aerial vehicles (UAVs): practical aspects, applications, open challenges, security issues, and future trends. Intelligent Service Robotics, 16 (1), 109–137. https://doi.org/10.1007/s11370-022-00452-4
- Zafra, M., Hunder, M., Rao, A., Kiyada, S. (2024). How drone combat in Ukraine is changing warfare. Reuters. Available at: https://www.reuters.com/graphics/UKRAINE-CRISIS/DRONES/dwpkeyjwkpm
- Drony zrobleni v Ukraini: rozvidnyky, bombery ta dalekobiini kamikadze. Available at: https://militarnyi.com/uk/articles/drony-zrobleni-v-ukrayini-rozvidnyky-bombery-ta-dalekobijni-kamikadze
- Tezza, D., Andujar, M.; Yamamoto, S., Mori, H. (Eds.) (2022). First-Person View Drones and the FPV Pilot User Experience. Human Interface and the Management of Information: Applications in Complex Technological Environments. Cham: Springer, 404–417. https://doi.org/10.1007/978-3-031-06509-5_28
- DJI. Available at: https://www.dji.com
- Skydio. Available at: https://www.skydio.com
- DJi FlyCart: Revolutionizing Cargo Delivery. Loyalty Drones. Available at: https://loyaltydrones.com/dji-flycart-revolutionizing-cargo-delivery
- Malloy Aeronautics T150. eVTOL.news. Available at: https://web.archive.org/web/20220504013658/https://evtol.news/malloy-aeronautics-trv-150
- ELkholy, M. M., El-Hay, E. A. (2020). Efficient dynamic performance of brushless DC motor using soft computing approaches. Neural Computing and Applications, 32 (10), 6041–6054. https://doi.org/10.1007/s00521-019-04090-3
- Runge, N., Twedt, R., Olson, W., Berg, S., Smithee, I., Letcher, T. et al.; Larochelle, P., McCarthy, J. (Eds.) (2020). Design, Development, and Testing of an Autonomous Multirotor for Personal Transportation. Proceedings of the 2020 USCToMM Symposium on Mechanical Systems and Robotics. Cham: Springer, 53–67. https://doi.org/10.1007/978-3-030-43929-3_6
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2025 Oleksii Kolesnyk, Artem Kolesnyk, Denys Betin

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.







