Розробка методів автоматичного керування обертанням судна навколо полюсу повороту без дрейфу
DOI:
https://doi.org/10.15587/2706-5448.2022.269364Ключові слова:
безпека судноводіння, оптимізація процесів керування, безпечне розходження суден, автоматичний модуль керування, полюс поворотуАнотація
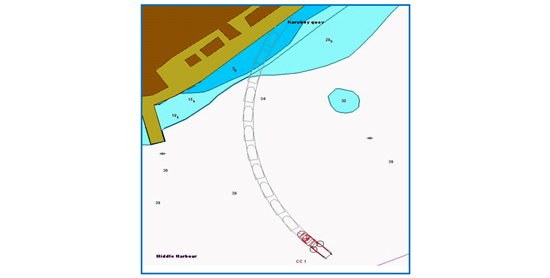
Об’єктом дослідження є процеси автоматичного керування обертанням судна навколо полюсу повороту з нульовим дрейфом. За останні роки суттєво збільшилася кількість суден та їх розміри, у той час як розміри портів ростуть значно повільніше. Виникла актуальна необхідність оптимізації процесів керування, особливо у стислих водах. Одним із напрямків такої оптимізації є використання концепції полюсу повороту – альтернативного погляду на рух судна при його маневруванні. Показано, що радіус циркуляції та положення судна на циркуляції визначається абсцисою і ординатою полюсу повороту. Розглянуті лінеаризовані моделі двох найбільш поширених схем керування: схеми керування одногвинтовим конвенційним судном без носового підрулюючого пристрою та схеми керування одногвинтовим конвенційним судном із носовим підрулюючим пристроєм. Для усталених рухів кожної із цих схем отримані керування, що забезпечують циркуляцію судна навколо заданого положення полюсу повороту, досліджені можливості циркуляції без кута дрейфу. Це дозволяє зменшити ширину полоси руху, підвищити безпеку руху, зменшити гідродинамічний опір та витрати палива, створити сприятливі умови для проведення технологічних операцій, наприклад, швартування, зменшити вплив людського чинника на процеси керування. Працездатність та ефективність розроблених методів перевірені математичним моделюванням автоматичного швартування судна MSС Container Ship (Dis. 32025t) без кута дрейфу на стенді імітаційного моделювання, створеного авторами на базі навігаційного тренажеру Navi Trainer 5000. Отримані можливості пояснюються використанням математичної моделі судна у бортовому обчислювачі автоматизованої системи та сучасного математичного апарату. Розроблені методи можуть використовуватися на суднах, за умови інтегрування в існуючу автоматизовану систему бортового обчислювача з відкритою архітектурою для нарощування можливостей автоматичного керування рухом. На сьогодні, в усіх автоматизованих системах вже використовується електронний принцип формування та передачі сигналів від пристроїв керування (телеграфу силової енергетичної установки, штурвалу, телеграфів підрулюючих пристроїв) до виконавчих пристроїв, що значно спрощує інтеграцію бортового обчислювача та створення замкнутого контуру автоматичного керування.
Посилання
- Seo, S. G. (2011). The Use of Pivot Point in Ship Handling for Safer and More Accurate Ship Manoeuvring. Proceedings of IMLA, 1 (29), 271–280. Available at: https://www.academia.edu/36456506/The_Use_of_Pivot_Point_in_Ship_Handling_for_Safer_and_More_Accurate_Ship_Manoeuvring
- Seo, S.-G. (2016). Safer and More Efficient Ship Handling with the Pivot Point Concept. TransNav, the International Journal on Marine Navigation and Safety of Sea Transportation, 10 (4), 605–612. doi: https://doi.org/10.12716/1001.10.04.09
- Hooyer, H. H. (1983). Behavior and Handling of Ships. Cornell Maritime Press.
- Tzeng, C.-Y. (1998). Analysis of The Pivot Point for a Turning Ship. Journal of Marine Science and Technology, 6 (1), 34–44. doi: https://doi.org/10.51400/2709-6998.2518
- Chase, G. A. (1999). Sailing Vessel Handling and Seamanship – The Moving Pivot Point. The Northern Mariner/Le Marin Du Nord, 9 (3), 53–59. doi: https://doi.org/10.25071/2561-5467.629
- Cauvier, H. (2008). The Pivot Point. The PILOT. The official organ of the United Kingdom Maritime Pilots’ Association, 295. Available at: http://www.pilotmag.co.uk/wp-content/uploads/2008/06/pilotmag-295-final-web.pdf
- Artyszuk, J. (2010). Pivot point in ship manoeuvring. Scientific Journals Maritime University of Szczecin, 20 (92), 13–24.
- Paveliev, A. D. (2010). Determination pivot point position and its consideration when maneuvering the vessel. Volga State Academy of Water Transport, 112.
- Zinchenko, S., Tovstokoryi, O., Nosov, P., Popovych, I., Kyrychenko, K. (2022). Pivot Point position determination and its use for manoeuvring a vessel. Ships and Offshore Structures, 1–7. doi: https://doi.org/10.1080/17445302.2022.2052480
- Zinchenko, S., Mateichuk, V., Nosov, P., Popovych, I., Solovey, O., Mamenko, P., Grosheva, O. (2020). Use of Simulator Equipment for the Development and Testing of Vessel Control Systems. Electrical, Control and Communication Engineering, 16 (2), 58–64. doi: https://doi.org/10.2478/ecce-2020-0009
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2022 Serhii Zinchenko, Oleh Tovstokoryi, Oleksandr Sapronov, Andrii Petrovskyi, Artem Ivanov, Kostiantyn Tymofeiev

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.






