Дослідження можливостей гетерогенних роїв БПЛА за допомогою навчання з підкріпленням
DOI:
https://doi.org/10.15587/2706-5448.2023.293063Ключові слова:
навчання з підкріпленням, рої роботів, гетерогенні рої, рої БПЛА, гетерогенні рої БПЛААнотація
Об’єктом дослідження є гетерогенні та гомогенні рої безпілотних літальних апаратів (БПЛА). В дослідженні основна увага приділяється порівнянню гетерогенних і гомогенних роїв БПЛА, вивченню їх продуктивності в симуляційному середовищі, розробленому за допомогою бібліотеки Python Gym. Дослідження передбачає застосування алгоритмів навчання з підкріпленням, зокрема, проксимальної оптимізаційної політики, для навчання та оцінки роїв.
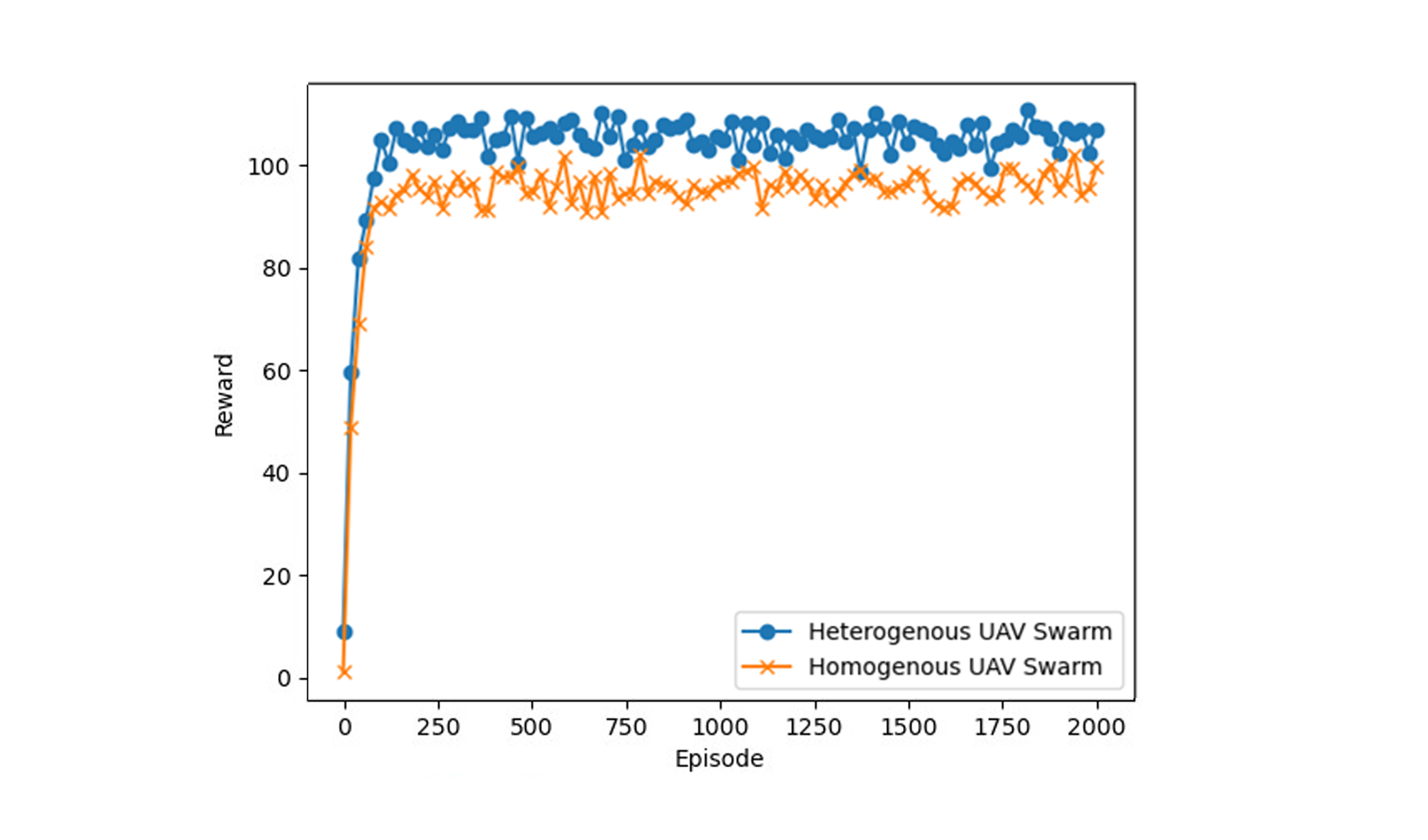
Основне питання, яке вирішується в цьому дослідженні, полягає в тому, щоб визначити, який тип рою БПЛА – гетерогенний або гомогенний – демонструє кращу продуктивність при виконанні певної задачі. Обрана задача передбачає пошук груп об'єктів у невідомій місцевості, що підкреслює здатність рою адаптуватися та ефективно знаходити об'єкти в динамічному середовищі.
Отримані результати свідчать про перевагу гетерогенних роїв БПЛА над їхніми однорідними аналогами. Гетерогенний рій має крутішу криву навчання та досягає вищих результатів за меншу кількість епізодів на етапі навчання. Основний висновок полягає в тому, що різноманітний набір навичок у гетерогенному рої дозволяє швидше адаптуватися до мінливих умов навколишнього середовища. Вища ефективність гетерогенного рою пояснюється різноманітністю можливостей агентів БПЛА, що дозволяє їм використовувати свої індивідуальні сильні сторони для досягнення кращої загальної ефективності при виконанні поставленого завдання.
Практичне застосування цих результатів залежить від вимог завдання та умов навколишнього середовища. У сценаріях, де завдання вимагають різноманітних навичок і адаптивності до мінливих умов, рекомендується використовувати гетерогенні рої БПЛА. Результати свідчать про їхню ефективність у таких сферах, як пошуково-рятувальні операції, моніторинг довкілля та інші динамічні завдання.
Отже, це дослідження дає корисну інформацію щодо оптимізації складу рою БПЛА для виконання конкретних завдань. Результати мають як теоретичне, так і практичне значення, оскільки підкреслюють переваги гетерогенності в можливостях рою.
Посилання
- Telli, K., Kraa, O., Himeur, Y., Ouamane, A., Boumehraz, M., Atalla, S., Mansoor, W. (2023). A Comprehensive Review of Recent Research Trends on Unmanned Aerial Vehicles (UAVs). Systems, 11 (8), 400. doi: https://doi.org/10.3390/systems11080400
- Abdelkader, M., Güler, S., Jaleel, H., Shamma, J. S. (2021). Aerial Swarms: Recent Applications and Challenges. Current Robotics Reports, 2 (3), 309–320. doi: https://doi.org/10.1007/s43154-021-00063-4
- Bushnaq, O. M., Mishra, D., Natalizio, E., Akyildiz, I. F. (2022). Unmanned aerial vehicles (UAVs) for disaster management. Nanotechnology-Based Smart Remote Sensing Networks for Disaster Prevention. Elsevier Inc., 159–188. doi: https://doi.org/10.1016/b978-0-323-91166-5.00013-6
- Qu, C., Boubin, J., Gafurov, D., Zhou, J., Aloysius, N., Nguyen, H., Calyam, P. (2022). UAV Swarms in Smart Agriculture: Experiences and Opportunities. 2022 IEEE 18th International Conference on E-Science (e-Science). doi: https://doi.org/10.1109/escience55777.2022.00029
- Ming, R., Jiang, R., Luo, H., Lai, T., Guo, E., Zhou, Z. (2023). Comparative Analysis of Different UAV Swarm Control Methods on Unmanned Farms. Agronomy, 13 (10), 2499. doi: https://doi.org/10.3390/agronomy13102499
- Wu, M., Zhu, X., Ma, L., Wang, J., Bao, W., Li, W., Fan, Z. (2022). Torch: Strategy evolution in swarm robots using heterogeneous-homogeneous coevolution method. Journal of Industrial Information Integration, 25, 100239. doi: https://doi.org/10.1016/j.jii.2021.100239
- Ferrante, E. (2009). A Control Architecture for a Heterogeneous Swarm of Robots The Design of a Modular Behavior-based Architecture. IRIDIA – Technical Report Series. Available at: https://citeseerx.ist.psu.edu/document?repid=rep1&type=pdf&doi=06c577a024d37f6a1cab79c74368ec54b8837880
- Dorigo, M., Floreano, D., Gambardella, L. M., Mondada, F., Nolfi, S., Baaboura, T. et al. (2013). Swarmanoid: A Novel Concept for the Study of Heterogeneous Robotic Swarms. IEEE Robotics & Automation Magazine. Available at: https://citeseerx.ist.psu.edu/document?repid=rep1&type=pdf&doi=09db526ea45bf5829f049f69100eb86322fe44fb
- Price, I. C. (2006). Evolving Self-Organized Behavior for Homogeneous and Heterogeneous UAV or UCAV Swarms. USAF. Air Force Institute of Technology. Available at: https://scholar.afit.edu/cgi/viewcontent.cgi?article=4466&context=etd
- Albrekht, Y., Pysarenko, A. (2023). Unknown location targets searching system in known environment using reinforcement learning. Adaptive systems of automatic control, 1 (42), 9–14. doi: https://doi.org/10.20535/1560-8956.42.2023.278920
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2023 Yosyp Albrekht, Andrii Pysarenko

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.






