Identification of dangerous situations in the road infrastructure using unmanned aerial vehicles
DOI:
https://doi.org/10.15587/2706-5448.2025.347074Keywords:
infrastructure, security, risks, monitoring, traffic, incidents, drones, aircraft, damage, urbanizationAbstract
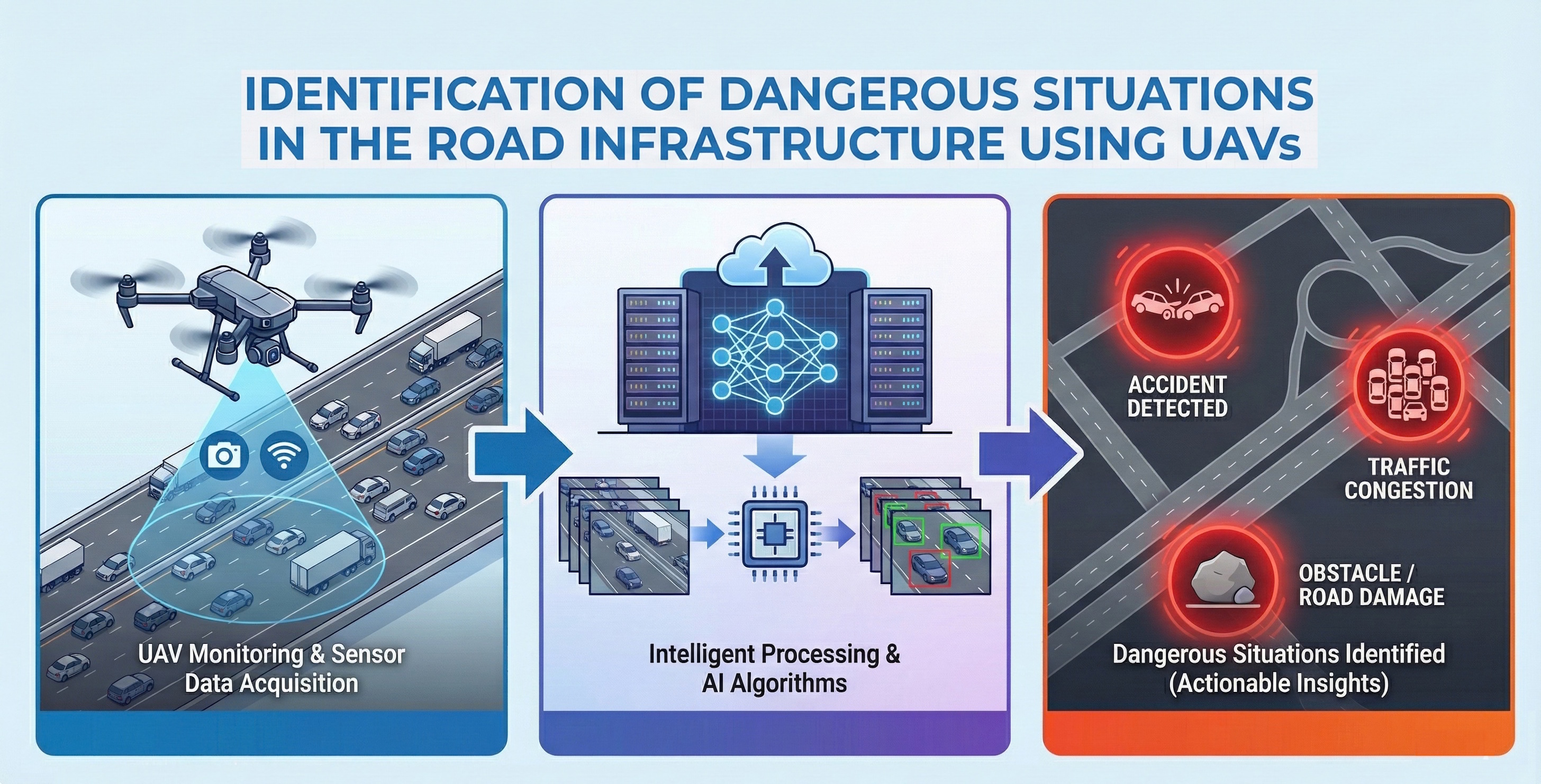
The object of the research is the developed automated computational model (AI-driven system) for real-time monitoring and analysis of road traffic, focusing on the identification and assessment of dangerous situations (traffic violations, congestion, and accident risks). This paper examines how the increased number of people moving to cities and their vehicles increases the likelihood of traffic accidents on public roads. It is also noted that traditional inspections are carried out very slowly and do not fully detect violations of traffic rules. To overcome these limitations, it is proposed a novel automated computational model for vehicle and accident tracking, based on UAVs combined with computer vision and artificial intelligence technologies. The proposed model allows for real-time threat detection and evaluation. The study, modeled in the MATLAB environment using real traffic data from drone-captured video. This model demonstrates significant improvements in operational metrics, an average detection achieved accuracy 89% for vehicles and critical events (e. g., congestion, deviations). The model successfully visualizes risk areas with heat maps and predicts short-term traffic pattern changes, increasing the reliability of traffic management and expanding the possibilities of traffic risk forecasting. The results obtained during the simulation can be used in practice by transport services, road, and maintenance organizations, particularly at difficult intersections and on highly accident-prone highways in urban, heavily built-up areas.
Supporting Agency
- This research is funded by the Science Committee of the Ministry of Education and Science of the Republic of Kazakhstan (Grant No. AP25793987: Research and application of artificial intelligence for protection against UAVs).
References
- Outay, F., Mengash, H. A., Adnan, M. (2020). Applications of unmanned aerial vehicle (UAV) in road safety, traffic and highway infrastructure management: Recent advances and challenges. Transportation Research Part A: Policy and Practice, 141, 116–129. https://doi.org/10.1016/j.tra.2020.09.018
- Hryhoriev, Y., Lutsenko, S., Systierov, O., Kuttybayev, A., Kuttybayeva, A. (2023). Implementation of sustainable development approaches by creating the mining cluster: the case of MPP “Inguletskiy”. IOP Conference Series: Earth and Environmental Science, 1254 (1), 012055. https://doi.org/10.1088/1755-1315/1254/1/012055
- Wu, Y., Abdel-Aty, M., Zheng, O., Cai, Q., Zhang, S. (2020). Automated Safety Diagnosis Based on Unmanned Aerial Vehicle Video and Deep Learning Algorithm. Transportation Research Record: Journal of the Transportation Research Board, 2674 (8), 350–359. https://doi.org/10.1177/0361198120925808
- Zhu, C., Zhu, J., Bu, T., Gao, X. (2022). Monitoring and Identification of Road Construction Safety Factors via UAV. Sensors, 22 (22), 8797. https://doi.org/10.3390/s22228797
- Cristea, V.-M., Baigulbayeva, M., Ongarbayev, Y., Smailov, N., Akkazin, Y., Ubaidulayeva, N. (2023). Prediction of Oil Sorption Capacity on Carbonized Mixtures of Shungite Using Artificial Neural Networks. Processes, 11 (2), 518. https://doi.org/10.3390/pr11020518
- Taissariyeva, K., Abdykadyrov, A., Mussilimov, K., Jobalayeva, G., Marxuly, S. (2025). Analysis and Modeling of Environmental Monitoring Using Multicopters. International Journal of Innovative Research and Scientific Studies, 8 (3), 2947–2960.
- Dosbayev, Z., Abdrakhmanov, R., Akhmetova, O., Nurtas, M., Iztayev, Z., Zhaidakbaeva, L., Shaimerdenova, L. (2021). Audio Surveillance: Detection of Audio-Based Emergency Situations. Advances in Computational Collective Intelligence. Cham: Springer International Publishing, 413–424. https://doi.org/10.1007/978-3-030-88113-9_33
- Seidaliyeva, U., Smailov, N. (2025). Leveraging drone technology for enhanced safety and route planning in rock climbing and extreme sports training. Retos, 63, 598–609. https://doi.org/10.47197/retos.v63.110869
- Taissariyeva, K., Karakiliç, M., Mussilimov, K., Hataş, H. (2025). A Novel Single-Source 13-Level Switched- Capacitor Inverter With Triple Voltage Gain. IEEE Access, 13, 135074–135088. https://doi.org/10.1109/access.2025.3594159
- Li, R., Yu, J., Li, F., Yang, R., Wang, Y., Peng, Z. (2023). Automatic bridge crack detection using Unmanned aerial vehicle and Faster R-CNN. Construction and Building Materials, 362, 129659. https://doi.org/10.1016/j.conbuildmat.2022.129659
- Alawad, W., Halima, N. B., Aziz, L. (2023). An Unmanned Aerial Vehicle (UAV) System for Disaster and Crisis Management in Smart Cities. Electronics, 12 (4), 1051. https://doi.org/10.3390/electronics12041051
- Li, X., Chen, Y., Chen, Z., Huang, Z. (2025). Coverage path planning of bridge inspection with Unmanned aerial vehicle. Engineering Applications of Artificial Intelligence, 156, 111253. https://doi.org/10.1016/j.engappai.2025.111253
- Wójcik, W., Kalizhanova, A., Kulyk, Y., Knysh, B., Kvyetnyy, R., Kulyk, A. et al. (2022). The Method of Time Distribution for Environment Monitoring Using Unmanned Aerial Vehicles According to an Inverse Priority. Journal of Ecological Engineering, 23 (11), 179–187. https://doi.org/10.12911/22998993/153458
- Seidaliyeva, U., Alduraibi, M., Ilipbayeva, L., Smailov, N. (2020). Deep residual neural network-based classification of loaded and unloaded UAV images. 2020 Fourth IEEE International Conference on Robotic Computing (IRC). IEEE, 465–469. https://doi.org/10.1109/irc.2020.00088
- Smailov, N., Kashkimbayeva, N., Kubanova, N., Sabibolda, A., Mailybayev, Y. (2025). Review of AI-augmented multisensor architectures for detecting and neutralizing UAV threats. International Journal of Innovative Research and Scientific Studies, 8 (5), 1281–1294. https://doi.org/10.53894/ijirss.v8i5.9091
- Jiang, S., Zhang, J., Wang, W., Wang, Y. (2023). Automatic Inspection of Bridge Bolts Using Unmanned Aerial Vision and Adaptive Scale Unification-Based Deep Learning. Remote Sensing, 15 (2), 328. https://doi.org/10.3390/rs15020328
- Feng, H., Chen, F., Heng, W. (2024). Reconstruction of the Motion of Traffic Accident Vehicle in the Vehicle – Mounted Video Based on Direct Linear Transform. Journal of Advanced Transportation, 2024 (1). https://doi.org/10.1155/2024/5793435
- Berghaus, M., Lamberty, S., Ehlers, J., Kalló, E., Oeser, M. (2024). Vehicle trajectory dataset from drone videos including off-ramp and congested traffic – Analysis of data quality, traffic flow, and accident risk. Communications in Transportation Research, 4, 100133. https://doi.org/10.1016/j.commtr.2024.100133
- Bakirci, M. (2025). Internet of Things-enabled unmanned aerial vehicles for real-time traffic mobility analysis in smart cities. Computers and Electrical Engineering, 123, 110313. https://doi.org/10.1016/j.compeleceng.2025.110313
- Zhu, Y., Wang, Y., An, Y., Yang, H., Pan, Y. (2024). Real-Time Vehicle Detection and Urban Traffic Behavior Analysis Based on Unmanned Aerial Vehicle Traffic Videos on Mobile Devices. https://doi.org/10.2139/ssrn.4976574
- Wang, Y., Zhang, J., Zhou, J. (2024). Urban traffic tiny object detection via attention and multi-scale feature driven in UAV-vision. Scientific Reports, 14 (1). https://doi.org/10.1038/s41598-024-71074-2
- Ma, W., Chu, Z., Chen, H., Li, M. (2024). Spatio-temporal envolutional graph neural network for traffic flow prediction in UAV-based urban traffic monitoring system. Scientific Reports, 14 (1). https://doi.org/10.1038/s41598-024-78335-0
- Liu, Z., Chen, C., Huang, Z., Chang, Y. C., Liu, L., Pei, Q. (2024). A Low-Cost and Lightweight Real-Time Object-Detection Method Based on UAV Remote Sensing in Transportation Systems. Remote Sensing, 16 (19), 3712. https://doi.org/10.3390/rs16193712
- Arévalo-Verjel, A. N., Lerma, J. L., Carbonell-Rivera, J. P., Prieto, J. F., Fernández, J. (2025). Assessment of Photogrammetric Performance Test on Large Areas by Using a Rolling Shutter Camera Equipped in a Multi-Rotor UAV. Applied Sciences, 15 (9), 5035. https://doi.org/10.3390/app15095035
- Singh, V., Sharma, S. K. (2023). Critical factors of multi-agent technology influencing manufacturing organizations: an AHP and DEMATEL-oriented analysis. International Journal of Computer Integrated Manufacturing, 37 (3), 243–265. https://doi.org/10.1080/0951192x.2023.2209857
- Wang, F., Zou, Y., Chen, X., Zhang, C., Hou, L., del Rey Castillo, E., Lim, J. B. P. (2024). Rapid in-flight image quality check for UAV-enabled bridge inspection. ISPRS Journal of Photogrammetry and Remote Sensing, 212, 230–250. https://doi.org/10.1016/j.isprsjprs.2024.05.008
- Caruso, A., Galluccio, L., Grasso, C., Ignaccolo, M., Inturri, G., Leonardi, P. et al. (2025). Advancing Urban Traffic Monitoring in Smart Cities: A Field Experiment with UAV-Based System for Transport Planning and Intelligent Traffic Management. 2025 Integrated Communications, Navigation and Surveillance Conference (ICNS). IEEE, 1–9. https://doi.org/10.1109/icns65417.2025.10976747
- Sun, Z., Wang, J., Ma, X., Liu, J. (2024). Vehicle Trajectory Deviation Data Collection Method Based on Unmanned Aerial Vehicle Aerial Imagery. CICTP 2024, 2013–2022. https://doi.org/10.1061/9780784485484.190
- Zhang, Y., Zhao, R., Mishra, D., Ng, D. W. K. (2024). A Comprehensive Review of Energy-Efficient Techniques for UAV-Assisted Industrial Wireless Networks. Energies, 17 (18), 4737. https://doi.org/10.3390/en17184737
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Nurzhigit Smailov, Yerzhan Nussupov, Kyrmyzy Taissariyeva, Aidar Kuttybayev, Moldir Baigulbayeva, Mukhit Turumbetov, Yulian Hryhoriev, Serhii Lutsenko

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.






