Розробка системи керування мобільним роботом LEGO Mindstorms EV3 на основі елементів MATLAB/Simulink
DOI:
https://doi.org/10.15587/2706-5448.2023.274846Ключові слова:
мобільний робот, LEGO Mindstorms EV3, MATLAB/Simulink, контролер, система керування, прямуванняАнотація
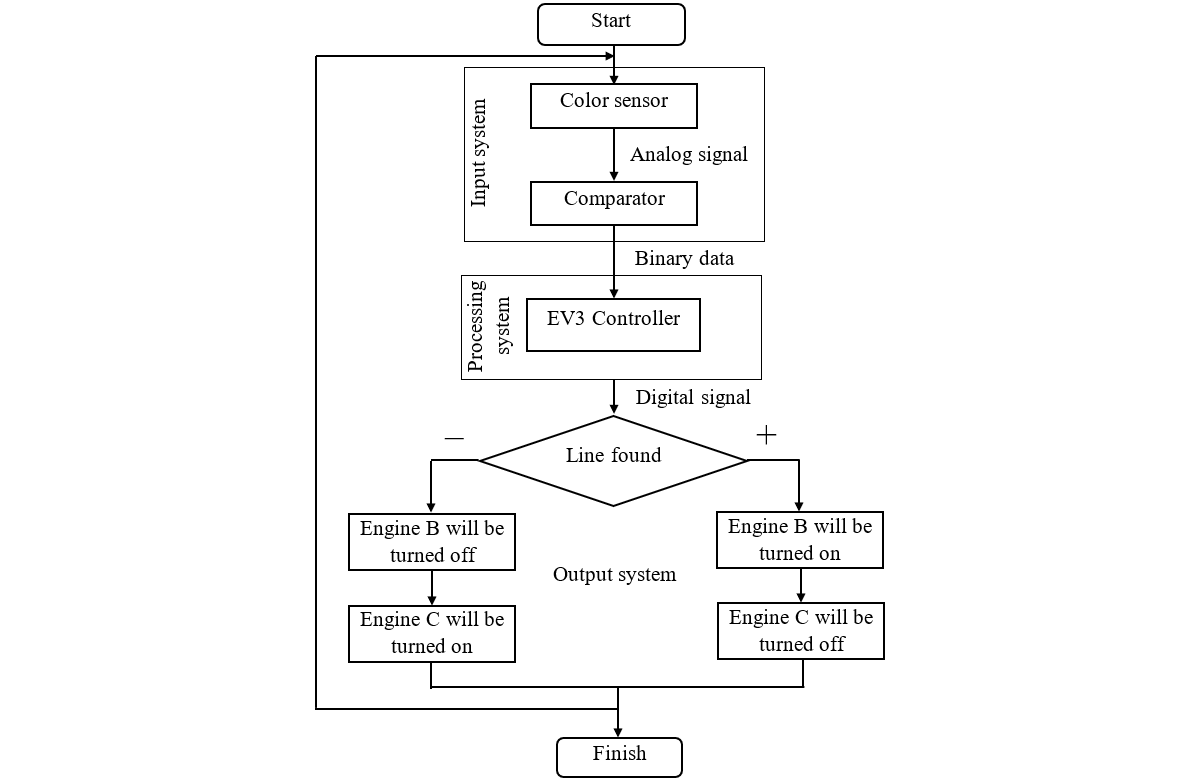
Робот Mindstorms EV3, розроблений LEGO, є одним із популярних роботів, який широко використовується в різних сферах. На відміну від попередніх версій мобільних роботів LEGO, EV3 дозволяє розробляти програми в режимі реального часу для викладання різноманітних предметів, а також для проведення дослідницьких експериментів. Об’єктом дослідження в цьому випадку є робот Mindstorms EV3, підключений до MATLAB/Simulink. Конструкція складається з контролера, одного датчика кольору, двох серводвигунів і одного опорного колеса. Кожен серводвигун побудований на колекторному двигуні постійного струму з відповідним редуктором і має можливість вимірювати відповідну кількість обертів. Як датчик кольору використовується цифровий датчик з частотою дискретизації 1 кГц, який може визначати колір або яскравість світла. Незважаючи на свою популярність, система керування роботом EV3 у взаємодії із середовищем програмування MATLAB/Simulink є досить складним рішенням і тому потребує подальших досліджень. Наукова частина дослідження зосереджена на виявленні закономірностей системи керування Mindstorms EV3, розробці моделі системи керування та вивченні потенціалу MATLAB/Simulink для розширення можливостей робота. Проведено аналіз основних елементів системи керування, таких як датчики та сервоприводи. Побудовано графіки залежностей характеристик сервоприводів та перевірено ефективність руху робота залежно від параметрів, заданих у програмі. Результатом розробки системи керування мобільним роботом стало налаштування регуляторів руху мобільного робота по заданій траєкторії у вигляді накресленої лінії, що дозволило оцінити максимально допустиму швидкість руху робота. Представлене дослідження та розробка системи керування на основі елементів MATLAB/Simulink дозволяє за допомогою запропонованого методу з високою точністю керувати мобільним роботом, аналізувати та перевіряти електромеханічні параметри робота в режимі реального часу. Ця система управління має високий потенціал і практично може бути інтегрована в промислові об'єкти мобільної робототехніки за умови відповідності типів датчиків і виконавчих механізмів мобільного робота.
Спонсор дослідження
- This study is financially supported by the National High Level Foreign Experts Introduction Project (G2022014116L) and Yancheng Key Technology Unveiling Project (Research, development and application of intelligent unmanned boat and cluster control technology). Presentation of research in the form of publication through financial support in the form of a grant from SUES (Support to Ukrainian Editorial Staff).
Посилання
- Irigoyen, E., Larzabal, E., Priego, R. (2013). Low-cost platforms used in Control Education: An educational case study. IFAC Proceedings Volumes, 46 (17), 256–261. doi: https://doi.org/10.3182/20130828-3-uk-2039.00058
- Pedersen, B. K. M. K., Larsen, J. C., Nielsen, J. (2019). The Effect of Commercially Available Educational Robotics: A Systematic Review. Advances in Intelligent Systems and Computing, 14–27. doi: https://doi.org/10.1007/978-3-030-26945-6_2
- Zhang, M., Wan, Y. (2020). Improving learning experiences using LEGO Mindstorms EV3 robots in control systems course. The International Journal of Electrical Engineering & Education. doi: https://doi.org/10.1177/0020720920965873
- Ding, J., Li, Z., Pan, T. (2017). Control System Teaching and Experiment Using LEGO MINDSTORMS NXT Robot. International Journal of Information and Education Technology, 7 (4), 309–313. doi: https://doi.org/10.18178/ijiet.2017.7.4.886
- Maharuddin, M. F., Ghani, N. M., Jamin, N. F. (2018). Two-Wheeled LEGO EV3 Robot Stabilisation Control Using Fuzzy Logic Based PSO Algorithm. Journal of Telecommunication, Electronic and Computer Engineering, 10 (2-5), 149–153. doi: Available at: https://jtec.utem.edu.my/jtec/article/view/4402
- Rosillo, N., Montés, N., Alves, J. P., Ferreira, N. M. F. (2019). A Generalized Matlab/ROS/Robotic Platform Framework for Teaching Robotics. Advances in Intelligent Systems and Computing, 1023, 159–169. doi: https://doi.org/10.1007/978-3-030-26945-6_15
- Akmal, M. A., Jamin, N. F., Ghani, N. M. A. (2017). Fuzzy logic controller for two wheeled EV3 LEGO robot. 2017 IEEE Conference on Systems, Process and Control (ICSPC). Melaka, 134–139. doi: https://doi.org/10.1109/spc.2017.8313035
- Serrano, V., Thompson, M., Tsakalis, K. (2017). Learning Multivariable Controller Design: a Hands-on Approach with a Lego Robotic Arm. Lecture Notes in Networks and Systems, 271–278. doi: https://doi.org/10.1007/978-3-319-54377-2_23
- Pinto, M., Moreira, A. P., Matos, A. (2012). Localization of Mobile Robots Using an Extended Kalman Filter in a LEGO NXT. IEEE Transactions on Education, 55 (1), 135–144. doi: https://doi.org/10.1109/te.2011.2155066
- Cuéllar, M. P., Pegalajar, M. C. (2011). Design and implementation of intelligent systems with LEGO Mindstorms for undergraduate computer engineers. Computer Applications in Engineering Education, 22 (1), 153–166. doi: https://doi.org/10.1002/cae.20541
- Canale, M., Casale-Brunet, S. (2014). A multidisciplinary approach for Model Predictive Control Education: A Lego Mindstorms NXT-based framework. International Journal of Control, Automation and Systems, 12 (5), 1030–1039. doi: https://doi.org/10.1007/s12555-013-0282-7
- Montés, N., Rosillo, N., Mora, M. C., Hilario, L. (2018). Real-Time Matlab-Simulink-Lego EV3 Framework for Teaching Robotics Subjects. Advances in Intelligent Systems and Computing, 230–240. doi: https://doi.org/10.1007/978-3-319-97085-1_23
- Montes, N., Rosillo, N., Mora, M. C., Hilario, L. (2021). A Novel Real-Time MATLAB/Simulink/LEGO EV3 Platform for Academic Use in Robotics and Computer Science. Sensors, 21 (3), 1006. doi: https://doi.org/10.3390/s21031006
- Basilio, J. C., Matos, S. R. (2002). Design of PI and PID controllers with transient performance specification. IEEE Transactions on Education, 45 (4), 364–370. doi: https://doi.org/10.1109/te.2002.804399
- Ünal, M., Erdal, H., Topuz, V. (2010). Trajectory tracking performance comparison between genetic algorithm and ant colony optimization for PID controller tuning on pressure process. Computer Applications in Engineering Education, 20 (3), 518–528. doi: https://doi.org/10.1002/cae.20420
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2023 Chengjian Dong, Oleksii Povorozniuk, Andriy Topalov, Kai Wang, Zhicong Chen

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.







