Development of the control system for LEGO Mindstorms EV3 mobile robot based on MATLAB/Simulink elements
DOI:
https://doi.org/10.15587/2706-5448.2023.274846Keywords:
mobile robot, LEGO Mindstorms EV3, MATLAB/Simulink, controller, control system, line-followingAbstract
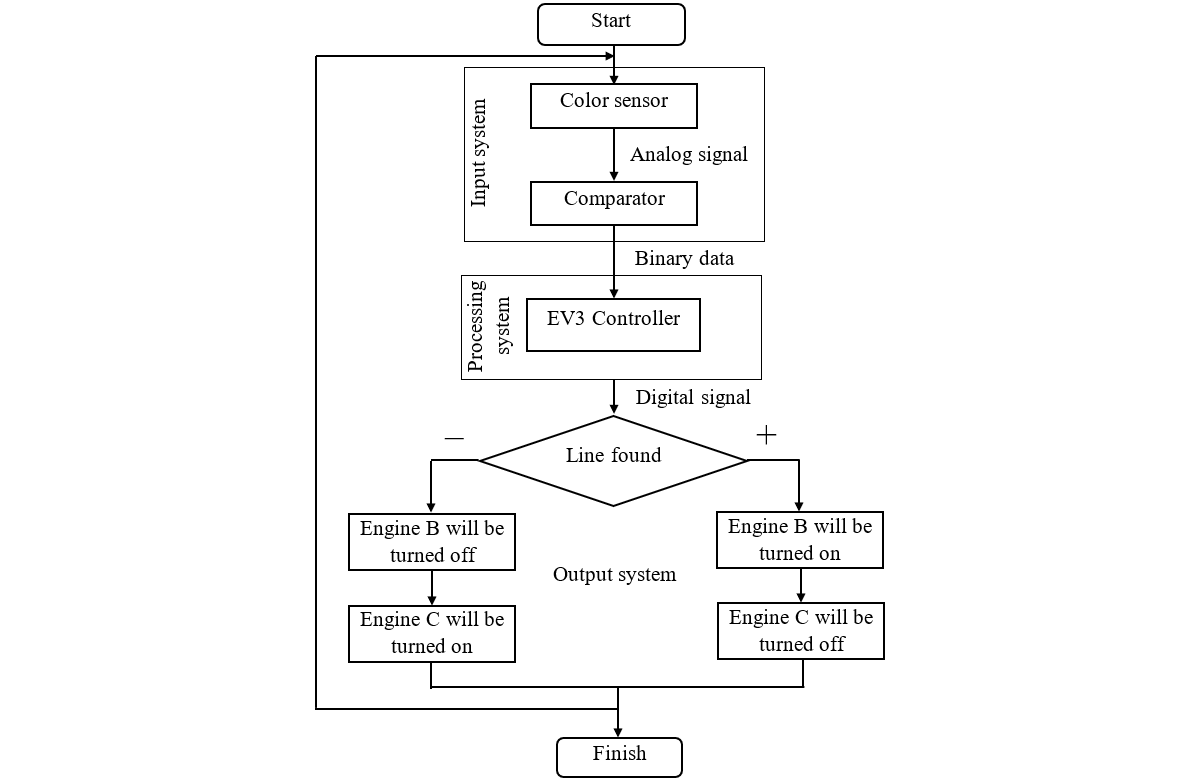
The Mindstorms EV3 robot, developed by LEGO, is one of the popular robots that has been widely used in various fields. Unlike previous versions of mobile LEGO robots, EV3 allows the development of real-time applications for teaching a variety of subjects, as well as for conducting research experiments. The object of research in this case is the Mindstorms EV3 robot connected to MATLAB/Simulink. The design consists of a controller, one color sensor, two servo motors and one support wheel. Each servo motor is built on a DC collector motor with a matching gearbox and has the ability to measure the number of revolutions corresponding. A digital sensor with a sampling frequency of 1 kHz is used as a color sensor, which can determine the color or brightness of light. Despite its popularity, the EV3 robot control system in interaction with the MATLAB/Simulink programming environment is a rather complex solution and therefore requires further research. The scientific part of the research focuses on discovering the regularities of the Mindstorms EV3 control system, developing a control system model, and exploring the potential of MATLAB/Simulink to expand the robot's capabilities. An analysis of the main elements of the control system, such as sensors and servos, was carried out. The graphs of the dependences of the characteristics of the servo drives were built and the efficiency of the robot movement was checked depending on the parameters set in the program. The result of the development of the mobile robot control system was the adjustment of the mobile robot movement regulators along a given trajectory in the form of a drawn line, which allowed estimating the maximum permissible speed of the robot movement. The presented research and development of a control system based on MATLAB/Simulink elements allows using the proposed method to control a mobile robot with high precision, analyze and verify the robot's electromechanical parameters in real time. This control system has a high potential and can practically be integrated into industrial objects of mobile robotics, provided types the sensors and executive mechanisms of the mobile robot match.
Supporting Agency
- This study is financially supported by the National High Level Foreign Experts Introduction Project (G2022014116L) and Yancheng Key Technology Unveiling Project (Research, development and application of intelligent unmanned boat and cluster control technology). Presentation of research in the form of publication through financial support in the form of a grant from SUES (Support to Ukrainian Editorial Staff).
References
- Irigoyen, E., Larzabal, E., Priego, R. (2013). Low-cost platforms used in Control Education: An educational case study. IFAC Proceedings Volumes, 46 (17), 256–261. doi: https://doi.org/10.3182/20130828-3-uk-2039.00058
- Pedersen, B. K. M. K., Larsen, J. C., Nielsen, J. (2019). The Effect of Commercially Available Educational Robotics: A Systematic Review. Advances in Intelligent Systems and Computing, 14–27. doi: https://doi.org/10.1007/978-3-030-26945-6_2
- Zhang, M., Wan, Y. (2020). Improving learning experiences using LEGO Mindstorms EV3 robots in control systems course. The International Journal of Electrical Engineering & Education. doi: https://doi.org/10.1177/0020720920965873
- Ding, J., Li, Z., Pan, T. (2017). Control System Teaching and Experiment Using LEGO MINDSTORMS NXT Robot. International Journal of Information and Education Technology, 7 (4), 309–313. doi: https://doi.org/10.18178/ijiet.2017.7.4.886
- Maharuddin, M. F., Ghani, N. M., Jamin, N. F. (2018). Two-Wheeled LEGO EV3 Robot Stabilisation Control Using Fuzzy Logic Based PSO Algorithm. Journal of Telecommunication, Electronic and Computer Engineering, 10 (2-5), 149–153. doi: Available at: https://jtec.utem.edu.my/jtec/article/view/4402
- Rosillo, N., Montés, N., Alves, J. P., Ferreira, N. M. F. (2019). A Generalized Matlab/ROS/Robotic Platform Framework for Teaching Robotics. Advances in Intelligent Systems and Computing, 1023, 159–169. doi: https://doi.org/10.1007/978-3-030-26945-6_15
- Akmal, M. A., Jamin, N. F., Ghani, N. M. A. (2017). Fuzzy logic controller for two wheeled EV3 LEGO robot. 2017 IEEE Conference on Systems, Process and Control (ICSPC). Melaka, 134–139. doi: https://doi.org/10.1109/spc.2017.8313035
- Serrano, V., Thompson, M., Tsakalis, K. (2017). Learning Multivariable Controller Design: a Hands-on Approach with a Lego Robotic Arm. Lecture Notes in Networks and Systems, 271–278. doi: https://doi.org/10.1007/978-3-319-54377-2_23
- Pinto, M., Moreira, A. P., Matos, A. (2012). Localization of Mobile Robots Using an Extended Kalman Filter in a LEGO NXT. IEEE Transactions on Education, 55 (1), 135–144. doi: https://doi.org/10.1109/te.2011.2155066
- Cuéllar, M. P., Pegalajar, M. C. (2011). Design and implementation of intelligent systems with LEGO Mindstorms for undergraduate computer engineers. Computer Applications in Engineering Education, 22 (1), 153–166. doi: https://doi.org/10.1002/cae.20541
- Canale, M., Casale-Brunet, S. (2014). A multidisciplinary approach for Model Predictive Control Education: A Lego Mindstorms NXT-based framework. International Journal of Control, Automation and Systems, 12 (5), 1030–1039. doi: https://doi.org/10.1007/s12555-013-0282-7
- Montés, N., Rosillo, N., Mora, M. C., Hilario, L. (2018). Real-Time Matlab-Simulink-Lego EV3 Framework for Teaching Robotics Subjects. Advances in Intelligent Systems and Computing, 230–240. doi: https://doi.org/10.1007/978-3-319-97085-1_23
- Montes, N., Rosillo, N., Mora, M. C., Hilario, L. (2021). A Novel Real-Time MATLAB/Simulink/LEGO EV3 Platform for Academic Use in Robotics and Computer Science. Sensors, 21 (3), 1006. doi: https://doi.org/10.3390/s21031006
- Basilio, J. C., Matos, S. R. (2002). Design of PI and PID controllers with transient performance specification. IEEE Transactions on Education, 45 (4), 364–370. doi: https://doi.org/10.1109/te.2002.804399
- Ünal, M., Erdal, H., Topuz, V. (2010). Trajectory tracking performance comparison between genetic algorithm and ant colony optimization for PID controller tuning on pressure process. Computer Applications in Engineering Education, 20 (3), 518–528. doi: https://doi.org/10.1002/cae.20420
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Chengjian Dong, Oleksii Povorozniuk, Andriy Topalov, Kai Wang, Zhicong Chen

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.






