Визначення аналітичних залежностей розподілу сил у зоні контакту деформівне колесо – деформівна поверхня
DOI:
https://doi.org/10.15587/2706-5448.2025.329471Ключові слова:
деформівне колесо, деформівна поверхня, ущільнення ґрунту, поверхня контакту, зона контактуАнотація
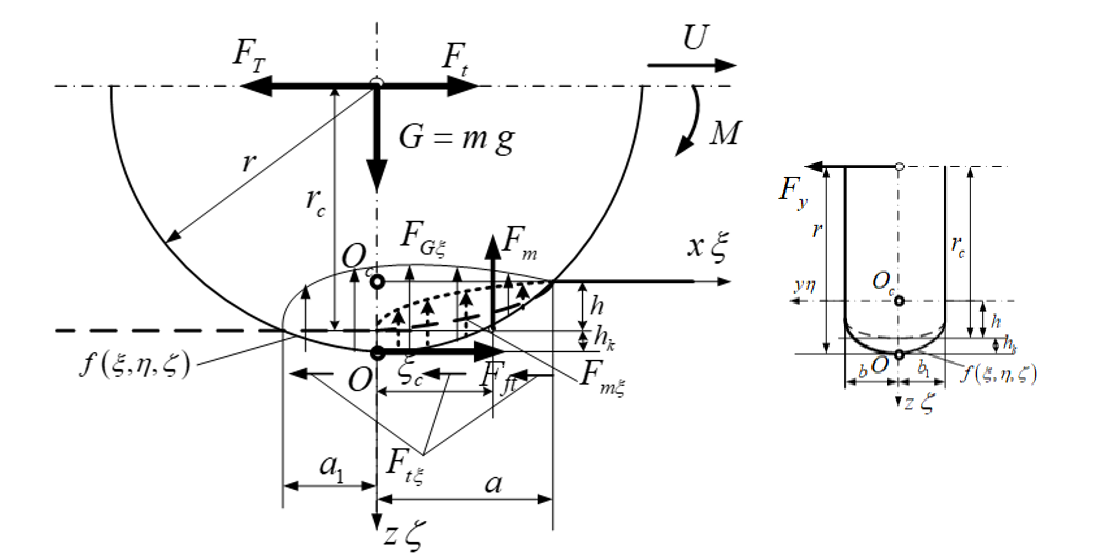
Об'єктом цього дослідження є контактна взаємодія двох деформівних тіл неузгодженої геометричної форми, зокрема, зміни напружено-деформованого стану колеса та опорної поверхні. Актуальність даної теми обумовлена зростанням вимог до прохідності техніки в складних умовах, необхідністю зниження негативного впливу на довкілля, а також потребою в оптимізації конструкцій рухомих елементів машин. Одним із найбільш складних питань є побудова адекватного аналітичного рішення для визначення змін напружено-деформованого стану в зоні контакту колеса з ґрунтовою або іншою поверхнею.
У цьому дослідженні застосовано підхід, заснований на основних положеннях математичної фізики, що використовуються при розв’язанні задач теорії пружності. Це дозволило вивести аналітичні рівняння для опису абсолютних деформацій поверхні та колеса (шини), розподілу контактного тиску та абсолютних деформацій. Розподіл тиску в зоні контакту був отриманий з використанням властивостей поверхневого інтеграла другого роду. При цьому зосереджені сили віднесені до площі контакту прирівнювались до інтегральної величини поверхневого інтегралу другого роду. Величини розподілених сил використовувались в перетворених рівняннях потенціалів Бусинеску та Черруті.
Отримані аналітичні залежності дозволяють використати їх для визначення відносних деформацій контактуючих тіл та розподілу напружень в них. Важливим є те, що ці аналітичні залежності дозволяють використати їх для отримання залежностей для визначення границь зони контакту та коефіцієнту тертя кочення для деформівних тіл. Отримані залежності мають загальний характер, оскільки представлені у загальному вигляді під дією навантажень як на ведуче колесо, так і на пасивне (ведене).
Запропонована модель забезпечує значне підвищення точності аналізу, в порівнянні з існуючими емпіричними підходами. Крім того, отримані залежності дозволять уникнути громіздких обчислень для кожного конкретного навантаження та кожного конкретного показника властивостей матеріалів методами FEM (finite element method) або DEM (discrete element method).
Посилання
- Kushnarov, A. S., Kochev, V. I. (1989). Mekhaniko-tekhnologicheskie osnovy obrabotki pochvy. Kyiv: Urozhai, 144.
- Kovbasa, V. P. (2006). Mekhaniko-tekhnolohichne obgruntuvannia optymizatsii robochykh orhaniv z gruntom. [Doctoral dissertation; Natsionalnyi universytet bioresursiv i pryrodokorystuvannia Ukrainy]. Available at: https://uacademic.info/ua/document/0506U000111#!
- Koolen, A. J., Kuipers, H. (1983). Agricultural Soil Mechanics. Berlin: Springer-Verlag Berlin Heidelberg. https://doi.org/10.1007/978-3-642-69010-5
- Swamy, V. S., Pandit, R., Yerro, A., Sandu, C., Rizzo, D. M., Sebeck, K., Gorsich, D. (2023). Review of modeling and validation techniques for tire-deformable soil interactions. Journal of Terramechanics, 109, 73–92. https://doi.org/10.1016/j.jterra.2023.05.007
- Yang, W., Tiecheng, S., Yongjie, L., Chundi, S. (2016). Prediction for Tire – Pavement Contact Stress under Steady – State Conditions based on 3D Finite Element Method. Journal of Engineering Science and Technology Review, 9 (4), 17–25. https://doi.org/10.25103/jestr.094.04
- Xiao, W., Zhang, Y. (2016). Design of manned lunar rover wheels and improvement in soil mechanics formulas for elastic wheels in consideration of deformation. Journal of Terramechanics, 65, 61–71. https://doi.org/10.1016/j.jterra.2016.03.004
- Guthrie, A. G., Botha, T. R., Els, P. S. (2017). 3D contact patch measurement inside rolling tyres. Journal of Terramechanics, 69, 13–21. https://doi.org/10.1016/j.jterra.2016.09.004
- Yamashita, H., Jayakumar, P., Alsaleh, M., Sugiyama, H. (2017). Physics-Based Deformable Tire–Soil Interaction Model for Off-Road Mobility Simulation and Experimental Validation. Journal of Computational and Nonlinear Dynamics, 13 (2). https://doi.org/10.1115/1.4037994
- Bekker, M. G. (1969). Introduction to Terrain-Vehicle Systems. Ann Arbor: University of Michigan Press.
- Pacejka, H. B. (2012). Tire and Vehicle Dynamics. Butterworth-Heinemann. https://doi.org/10.1016/C2010-0-68548-8
- Kovbasa, V. P., Solomka, A. V., Spirin, A. V., Kucheruk, V. Yu., Karabekova, D. Zh., Khassenov, A. K. (2020). Theoretical determination of the distribution of forces and the size of the boundaries of the contact in the interaction of the deformable drive wheel with the soil. Bulletin of the Karaganda University “Physics Series”, 99 (3), 62–72. https://doi.org/10.31489/2020ph3/62-72
- Johnson, K. L. (1985). Contact Mechanics. London: Cambridge University Press. https://doi.org/10.1017/cbo9781139171731
- Wong, J. Y. (2022). Theory of Ground Vehicles. Hoboken: John Wiley & Sons. https://doi.org/10.1002/9781119719984
- Johnson, W., Mellor, P. B. (1973). Engineering plasticity. London, New York: Van Nostrand Reinhold Co.
- Kovbasa, V., Priliepo, N. (2024). Interactions of a Deformable Wheel with a Deformable Support Surface. International Journal of Innovative Technology and Exploring Engineering, 13 (9), 1–4. https://doi.org/10.35940/ijitee.i9944.13090824
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2025 Volodymyr Kovbasa, Nataliia Priliepo

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.






