Development of an image segmentation method from unmanned aerial vehicles based on the ant colony algorithm under the influence of speckle noise
DOI:
https://doi.org/10.15587/2706-5448.2025.334993Keywords:
segmentation, unmanned aerial vehicle, ant algorithm, speckle noise, Sobel operatorAbstract
The object of research is the process of segmenting an image from an unmanned aerial vehicle based on the ant algorithm under the influence of speckle noise.
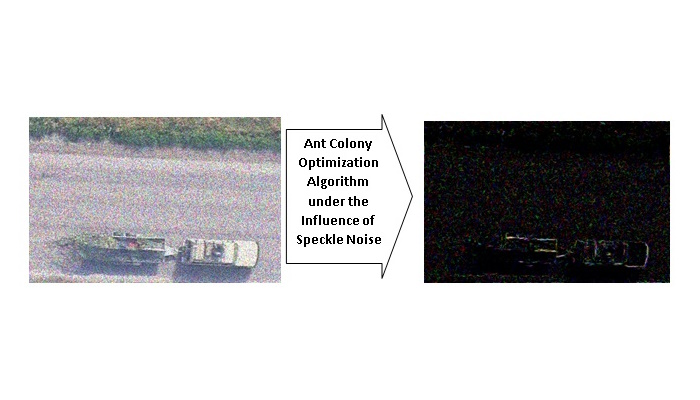
Unlike the known ones, the image segmentation method based on the ant algorithm involves the imitation of the collective behaviour of agents (ants) capable of adapting to local features of the image. In addition, the pheromone marking mechanism contributes to a more distinct delineation of the boundaries between segments, which positively affects the accuracy of dividing the image into segments.
Speckle noise is a type of multiplicative noise that occurs in images formed using coherent radiation. Its appearance is due to the interference of reflected waves coming from different points of the same object, but with microscopic differences in phase. This leads to the appearance of a chaotic granular structure that distorts the image and complicates further analysis.
Experimental studies have shown that the segmentation method based on the ant algorithm provides a reduction in segmentation errors of the first kind on average from 6% (in the absence of speckle noise) to 30% (at a speckle noise intensity σ = 15). With an increase in the speckle noise intensity, the gain in the value of the segmentation error of the first kind increases. The segmentation method based on the ant algorithm provides a reduction in segmentation errors of the second kind on average from 5% (in the absence of speckle noise) to 32% (at a speckle noise intensity σ = 15). With an increase in the speckle noise intensity, the gain in the value of the segmentation error of the second kind increases.
The practical value of the segmentation method based on the ant algorithm lies in the possibility of segmentation under the influence of speckle noise. At the same time, a reduction in segmentation errors of the first and second kind is ensured in comparison with the known method.
Supporting Agency
- The research was conducted with grant support from the National Research Foundation of Ukraine within the framework of the competition “Science for Strengthening the Defense Capability of Ukraine”, project “Information Technology for Automated Segmentation of Object Images in Targeting Systems of Strike FPV Drones Based on Swarm Intelligence Algorithms”, registration number 2023.04/0153.
References
- Fennelly, L. J., Perry, M. A. (2020). Unmanned Aerial Vehicle (Drone) Usage in the 21st Century. The Professional Protection Officer, 183–189. https://doi.org/10.1016/b978-0-12-817748-8.00050-x
- Rabiu, L., Ahmad, A., Gohari, A. (2024). Advancements of Unmanned Aerial Vehicle Technology in the Realm of Applied Sciences and Engineering: A Review. Journal of Advanced Research in Applied Sciences and Engineering Technology, 40 (2), 74–95. https://doi.org/10.37934/araset.40.2.7495
- Aerial photography and interpretative mapping. Archaeology Data Service. Available at: https://surl.li/jmffgp
- Young, I. T., Gerbrands, J. J., van Vliet, L. J. (2004). Fundamentals of image processing. Delft University of Technology, 112. Available at: https://homepages.inf.ed.ac.uk/rbf/CVonline/LOCAL_COPIES/TUDELFT/FIP2_3.pdf
- Eltner, A., Hoffmeister, D., Kaiser, A., Karrasch, P., Klingbeil, L., Stöcker, C. et al. (Eds.) (2022). UAVs for the environmental sciences: Methods and applications. WBG Academic, 492. Available at: https://www.researchgate.net/publication/359619321_UAVs_for_the_Environmental_Sciences
- Delavarpour, N., Koparan, C., Nowatzki, J., Bajwa, S., Sun, X. (2021). A Technical Study on UAV Characteristics for Precision Agriculture Applications and Associated Practical Challenges. Remote Sensing, 13 (6), 1204. https://doi.org/10.3390/rs13061204
- Rascon, C., Martinez-Carranza, J. (2024). A Review of Noise Production and Mitigation in UAVs. Machine Learning for Complex and Unmanned Systems. CRC Press, 220–235. https://doi.org/10.1201/9781003385615-12
- Lee, J. S., Jurkevich, L., Dewaele, P., Wambacq, P., Oosterlinck, A. (1994). Speckle filtering of synthetic aperture radar images: A review. Remote Sensing Reviews, 8 (4), 313–340. https://doi.org/10.1080/02757259409532206
- Khudov, H., Makoveichuk, O., Komarov, V., Khudov, V., Khizhnyak, I., Bashynskyi, V. et al. (2023). Determination of the number of clusters on images from space optic-electronic observation systems using the k-means algorithm. Eastern-European Journal of Enterprise Technologies, 3 (9 (123)), 60–69. https://doi.org/10.15587/1729-4061.2023.282374
- Khudov, H., Khudov, R., Khizhnyak, I., Hridasov, I., Hlushchenko, P. (2025). The small aerial objects segmentation method on optical-electronic images based on the Sobel Edge Detector. Advanced Information Systems, 9 (2), 5–10. https://doi.org/10.20998/2522-9052.2025.2.01
- Gonzalez, R. C., Woods, R. E. (2018). Digital image processing. Pearson. Available at: https://www.cl72.org/090imagePLib/books/Gonzales,Woods-Digital.Image.Processing.4th.Edition.pdf
- Long, J., Shelhamer, E., Darrell, T. (2015). Fully convolutional networks for semantic segmentation. 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Boston: IEEE. https://doi.org/10.1109/cvpr.2015.7298965
- Ronneberger, O., Fischer, P., Brox, T.; Navab, N., Hornegger, J., Wells, W., Frangi, A. (Eds.) (2015). U-Net: Convolutional Networks for Biomedical Image Segmentation. Medical Image Computing and Computer-Assisted Intervention – MICCAI 2015. Cham: Springer, 234–241. https://doi.org/10.1007/978-3-319-24574-4_28
- Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., Adam, H. (2018). Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation. Computer Vision – ECCV 2018, 833–851. https://doi.org/10.1007/978-3-030-01234-2_49
- Zhang, G., Lu, X., Tan, J., Li, J., Zhang, Z., Li, Q. et al. (2021). RefineMask: Towards High-Quality Instance Segmentation with Fine-Grained Features. 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 6857–6865. https://doi.org/10.1109/cvpr46437.2021.00679
- Khudov, H., Khizhnyak, I., Glukhov, S., Shamrai, N., Pavlii, V. (2024). The method for objects detection on satellite imagery based on the firefly algorithm. Advanced Information Systems, 8 (1), 5–11. https://doi.org/10.20998/2522-9052.2024.1.01
- Khudov, H., Khudov, V., Makoveichuk, O., Khizhnyak, I., Hridasov, I., Butko, I. et al. (2025). Development of an image segmentation method from unmanned aerial vehicles based on the particle swarm optimization algorithm. Technology Audit and Production Reserves, 3 (2 (83)), 88–95. https://doi.org/10.15587/2706-5448.2025.330973
- Khudov, H., Hridasov, I., Khizhnyak, I., Yuzova, I., Solomonenko, Y. (2024). Segmentation of image from a first-person-view unmanned aerial vehicle based on a simple ant algorithm. Eastern-European Journal of Enterprise Technologies, 4 (9 (130)), 44–55. https://doi.org/10.15587/1729-4061.2024.310372
- Dorigo, M., Maniezzo, V., Colorni, A. (1996). Ant system: optimization by a colony of cooperating agents. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 26 (1), 29–41. https://doi.org/10.1109/3477.484436
- Boyat, A. K., Joshi, B. K. (2015). A Review Paper : Noise Models in Digital Image Processing. Signal & Image Processing : An International Journal, 6 (2), 63–75. https://doi.org/10.5121/sipij.2015.6206
- Bezkoshtovni resursy BPLA. PortalGIS. Available at: https://portalgis.pro/bpla/bezkoshtovni-resursy-bpla
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Igor Ruban, Hennadii Khudov, Vladyslav Khudov, Oleksandr Makoveichuk, Irina Khizhnyak, Nazar Shamrai, Ihor Butko, Rostyslav Khudov, Valerii Varvarov, Oleksandr Kostianets

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.






