Розробка методу сегментування зображення з безпілотного літального апарату на основі мурашиного алгоритму в умовах впливу спекл-шуму
DOI:
https://doi.org/10.15587/2706-5448.2025.334993Ключові слова:
сегментування, безпілотний літальний апарат, мурашиний алгоритм, спекл-шум, оператор СобеляАнотація
Об’єктом дослідження є процес сегментування зображення з безпілотного літального апарату на основі мурашиного алгоритму при впливі спекл-шуму.
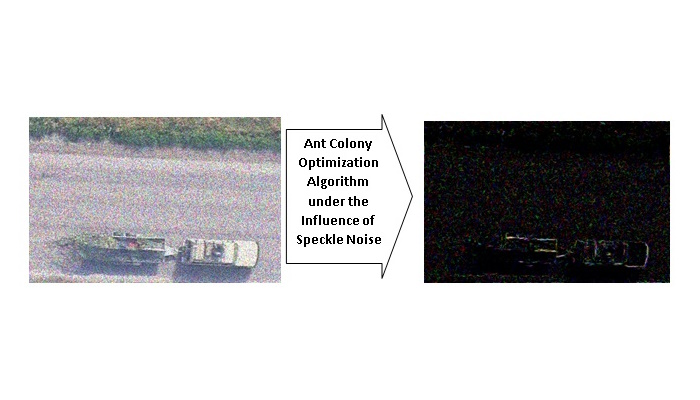
На відміну від відомих, метод сегментування зображення на основі мурашиного алгоритму передбачає імітацію колективної поведінки агентів (мурах), здатних адаптуватися до локальних особливостей зображення. Крім того, механізм феромонного маркування сприяє виразнішому окресленню границь між сегментами, що позитивно впливає на точність розділення зображення на сегменти.
Спекл-шум є видом мультиплікативного шуму, що виникає на зображеннях, сформованих за допомогою когерентного випромінювання. Його поява зумовлена інтерференцією відбитих хвиль, які надходять з різних точок одного об’єкта, але з мікроскопічними відмінностями у фазі. Це призводить до виникнення хаотичної зернистої структури, яка спотворює зображення та ускладнює подальший аналіз.
Експериментальні дослідження показали, що метод сегментування на основі мурашиного алгоритму забезпечує зниження помилок сегментування першого роду в середньому від 6% (при відсутності спекл-шуму) до 30% (при інтенсивності спекл-шуму σ = 15). Зі збільшенням інтенсивності спекл-шуму виграш у значенні помилки сегментування першого роду зростає. Метод сегментування на основі мурашиного алгоритму забезпечує зниження помилок сегментування другого роду в середньому від 5% (при відсутності спекл-шуму) до 32% (при інтенсивності спекл-шуму σ = 15). Зі збільшенням інтенсивності спекл-шуму виграш у значенні помилки сегментування другого роду зростає.
Практичне значення методу сегментування на основі мурашиного алгоритму полягає у можливості сегментування в умовах впливу спекл-шуму. При цьому забезпечується зниження помилок сегментування першого та другого роду у порівнянні з відомим методом.
Спонсор дослідження
- Дослідження проводилося за рахунок грантової підтримки Національного фонду досліджень України в рамках конкурсу «Наука для зміцнення обороноздатності України», проект «Інформаційна технологія автоматизованого сегментування зображень об’єктів в системах націлювання ударних FPV-дронів на основі алгоритмів ройового інтелекту», реєстраційний номер 2023.04/0153.
Посилання
- Fennelly, L. J., Perry, M. A. (2020). Unmanned Aerial Vehicle (Drone) Usage in the 21st Century. The Professional Protection Officer, 183–189. https://doi.org/10.1016/b978-0-12-817748-8.00050-x
- Rabiu, L., Ahmad, A., Gohari, A. (2024). Advancements of Unmanned Aerial Vehicle Technology in the Realm of Applied Sciences and Engineering: A Review. Journal of Advanced Research in Applied Sciences and Engineering Technology, 40 (2), 74–95. https://doi.org/10.37934/araset.40.2.7495
- Aerial photography and interpretative mapping. Archaeology Data Service. Available at: https://surl.li/jmffgp
- Young, I. T., Gerbrands, J. J., van Vliet, L. J. (2004). Fundamentals of image processing. Delft University of Technology, 112. Available at: https://homepages.inf.ed.ac.uk/rbf/CVonline/LOCAL_COPIES/TUDELFT/FIP2_3.pdf
- Eltner, A., Hoffmeister, D., Kaiser, A., Karrasch, P., Klingbeil, L., Stöcker, C. et al. (Eds.) (2022). UAVs for the environmental sciences: Methods and applications. WBG Academic, 492. Available at: https://www.researchgate.net/publication/359619321_UAVs_for_the_Environmental_Sciences
- Delavarpour, N., Koparan, C., Nowatzki, J., Bajwa, S., Sun, X. (2021). A Technical Study on UAV Characteristics for Precision Agriculture Applications and Associated Practical Challenges. Remote Sensing, 13 (6), 1204. https://doi.org/10.3390/rs13061204
- Rascon, C., Martinez-Carranza, J. (2024). A Review of Noise Production and Mitigation in UAVs. Machine Learning for Complex and Unmanned Systems. CRC Press, 220–235. https://doi.org/10.1201/9781003385615-12
- Lee, J. S., Jurkevich, L., Dewaele, P., Wambacq, P., Oosterlinck, A. (1994). Speckle filtering of synthetic aperture radar images: A review. Remote Sensing Reviews, 8 (4), 313–340. https://doi.org/10.1080/02757259409532206
- Khudov, H., Makoveichuk, O., Komarov, V., Khudov, V., Khizhnyak, I., Bashynskyi, V. et al. (2023). Determination of the number of clusters on images from space optic-electronic observation systems using the k-means algorithm. Eastern-European Journal of Enterprise Technologies, 3 (9 (123)), 60–69. https://doi.org/10.15587/1729-4061.2023.282374
- Khudov, H., Khudov, R., Khizhnyak, I., Hridasov, I., Hlushchenko, P. (2025). The small aerial objects segmentation method on optical-electronic images based on the Sobel Edge Detector. Advanced Information Systems, 9 (2), 5–10. https://doi.org/10.20998/2522-9052.2025.2.01
- Gonzalez, R. C., Woods, R. E. (2018). Digital image processing. Pearson. Available at: https://www.cl72.org/090imagePLib/books/Gonzales,Woods-Digital.Image.Processing.4th.Edition.pdf
- Long, J., Shelhamer, E., Darrell, T. (2015). Fully convolutional networks for semantic segmentation. 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Boston: IEEE. https://doi.org/10.1109/cvpr.2015.7298965
- Ronneberger, O., Fischer, P., Brox, T.; Navab, N., Hornegger, J., Wells, W., Frangi, A. (Eds.) (2015). U-Net: Convolutional Networks for Biomedical Image Segmentation. Medical Image Computing and Computer-Assisted Intervention – MICCAI 2015. Cham: Springer, 234–241. https://doi.org/10.1007/978-3-319-24574-4_28
- Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., Adam, H. (2018). Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation. Computer Vision – ECCV 2018, 833–851. https://doi.org/10.1007/978-3-030-01234-2_49
- Zhang, G., Lu, X., Tan, J., Li, J., Zhang, Z., Li, Q. et al. (2021). RefineMask: Towards High-Quality Instance Segmentation with Fine-Grained Features. 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 6857–6865. https://doi.org/10.1109/cvpr46437.2021.00679
- Khudov, H., Khizhnyak, I., Glukhov, S., Shamrai, N., Pavlii, V. (2024). The method for objects detection on satellite imagery based on the firefly algorithm. Advanced Information Systems, 8 (1), 5–11. https://doi.org/10.20998/2522-9052.2024.1.01
- Khudov, H., Khudov, V., Makoveichuk, O., Khizhnyak, I., Hridasov, I., Butko, I. et al. (2025). Development of an image segmentation method from unmanned aerial vehicles based on the particle swarm optimization algorithm. Technology Audit and Production Reserves, 3 (2 (83)), 88–95. https://doi.org/10.15587/2706-5448.2025.330973
- Khudov, H., Hridasov, I., Khizhnyak, I., Yuzova, I., Solomonenko, Y. (2024). Segmentation of image from a first-person-view unmanned aerial vehicle based on a simple ant algorithm. Eastern-European Journal of Enterprise Technologies, 4 (9 (130)), 44–55. https://doi.org/10.15587/1729-4061.2024.310372
- Dorigo, M., Maniezzo, V., Colorni, A. (1996). Ant system: optimization by a colony of cooperating agents. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 26 (1), 29–41. https://doi.org/10.1109/3477.484436
- Boyat, A. K., Joshi, B. K. (2015). A Review Paper : Noise Models in Digital Image Processing. Signal & Image Processing : An International Journal, 6 (2), 63–75. https://doi.org/10.5121/sipij.2015.6206
- Bezkoshtovni resursy BPLA. PortalGIS. Available at: https://portalgis.pro/bpla/bezkoshtovni-resursy-bpla
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2025 Igor Ruban, Hennadii Khudov, Vladyslav Khudov, Oleksandr Makoveichuk, Irina Khizhnyak, Nazar Shamrai, Ihor Butko, Rostyslav Khudov, Valerii Varvarov, Oleksandr Kostianets

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.







