Identification of the characteristics of control signal generation for implementing the traction mode of a physical model of magnetic levitation transport
DOI:
https://doi.org/10.15587/2706-5448.2026.355420Keywords:
magnetic levitation transport, traction module, physical model, control boards, electrodynamic processes, traction modeAbstract
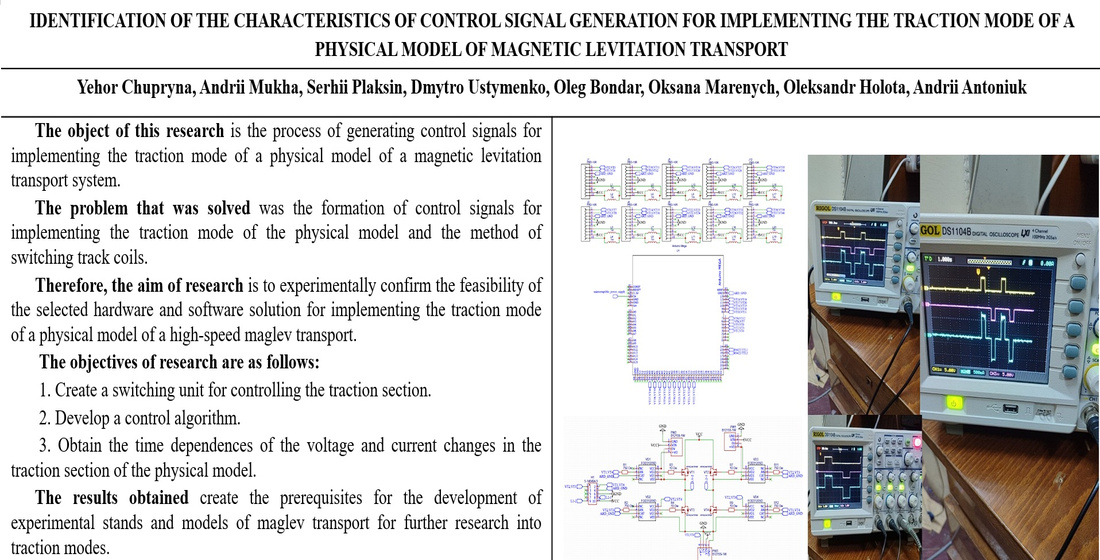
The object of this research is the process of generating control signals for implementing the traction mode of a physical model of a magnetic levitation transport system.
The problem that was solved was the formation of control signals for implementing the traction mode of the physical model and the method of switching track coils.
In the experimental physical model, the traction mode is implemented by control signals formed on the basis of the angular values of the encoder corresponding to the position of the crew. Based on these signals, the traction modules of the stand are commutated to ensure the necessary polarity of the magnetic field, which creates traction force and ensures the movement of the crew past the section.
The implementation of the traction mode requires accurate determination of the position of the crew relative to the track structure. For this purpose, an encoder signal is used, the information from which is processed in the control unit of the track structure section. A schematic solution and an algorithm for the operation of this unit for a physical model are proposed.
The search for an element base for control boards requires performance verification. From several variations of boards, the one that implements the proposed algorithm with satisfactory process quality was selected.
The main research method is an experiment conducted on a physical model stand. A switching control unit for the traction section of the physical model stand has been developed and implemented, which includes: control boards, a motherboard and software on the Arduino platform. A board option with three DC-DC converters was selected, which ensured stable operation of the traction section.
The main characteristics of electrodynamic processes were obtained, namely: moments of polarity switching of modules, changes in voltage, current and power during the passage of the crew past the section. The switching range of the traction section is approximately five seconds.
The results obtained create the prerequisites for the development of experimental stands and models of maglev transport for further research into traction modes.
References
- Holota, O., Ustymenko, D., Mukha, A., Plaksin, S., Chupryna, Y. (2025). Determination of the inductiveness of a physical model of track coils for high-speed transport. Technology Audit and Production Reserves, 3 (1 (83)), 52–57. https://doi.org/10.15587/2706-5448.2025.331995
- Holota, O. O., Mukha, A. M., Ustymenko, D. V., Plaksin, S. V. (2024). Investigation of Processes in the Traction Capacitor Circuit of the Model of High-Speed Magnetolevitation Transport. Science and Transport Progress, 1 (105), 30–41. https://doi.org/10.15802/stp2024/301521
- Holota, O. (2025). Research of control modes of the track structure of a physical model of maglev transport. Transport Systems and Transportation Technologies, 30, 29–36. https://doi.org/10.15802/tstt2025/340121
- Lee, H.-W., Kim, K.-C., Lee, J. (2006). Review of maglev train technologies. IEEE Transactions on Magnetics, 42 (7), 1917–1925. https://doi.org/10.1109/tmag.2006.875842
- He, X. (2025). Magnetic Levitation: Electrodynamic Suspension and Electromagnetic Suspension Technologies. Applied and Computational Engineering, 192 (1), 45–51. https://doi.org/10.54254/2755-2721/2026.ka27983
- Gao, H., Shi, T., Gao, X., Lei, Y., Yan, D., Guo, L., Yan, Y. (2024). Electromagnetic characteristic analysis and design of a linear motor used for ultra-high-speed EMS maglev train. Science China Technological Sciences, 67 (6), 1957–1973. https://doi.org/10.1007/s11431-023-2558-9
- Zhu, Q., Wang, S.-M., Ni, Y.-Q. (2024). A Review of Levitation Control Methods for Low- and Medium-Speed Maglev Systems. Buildings, 14 (3), 837. https://doi.org/10.3390/buildings14030837
- Kuptsov, V., Fajri, P., Rasheduzzaman, Md., Magdaleno-Adame, S., Hadziristic, K. (2022). Combined Propulsion and Levitation Control for Maglev/Hyperloop Systems Utilizing Asymmetric Double-Sided Linear Induction Motors. Machines, 10 (2), 131. https://doi.org/10.3390/machines10020131
- Deng, Z., Shi, H., Chen, Y., Ke, Z., Liang, L., Liu, X., Li, K., Zhang, W. (2025). A cost-effective linear propulsion system featuring PMEDW for HTS maglev vehicle: design, implementation, and dynamic test. Measurement, 240, 115618. https://doi.org/10.1016/j.measurement.2024.115618
- Liu, D., Wu, D., Xu, J., Li, Y., Gul, M. Z., Ni, F. (2025). Machine Learning in Maglev Transportation Systems: Review and Prospects. Actuators, 14 (12), 576. https://doi.org/10.3390/act14120576
- Plaksin, S., Mukha, A., Ustymenko, D., Shkil, Y., Holota, O., Chupryna, Y. (2022). 2-mode traction-levitation module of a promising magnetic-levitation transport system. Electromechanical and Energy Saving Systems, 58 (2), 56–65. https://doi.org/10.30929/2072-2052.2022.2.58.49-53
- Hovorov, P., Khvorost, M., Kindinova, A. (2023). Increasing the Efficiency of Solar Power Plants Based on the Use of Voltage Booster Transformers. 2023 IEEE 5th International Conference on Modern Electrical and Energy System (MEES), 1–5. https://doi.org/10.1109/mees61502.2023.10402408
- Fu, C., Sun, P., Wang, Q., Feng, X. (2025). Modeling and energy-saving operation optimization of high-speed maglev trains. Journal of Cleaner Production, 519, 146031. https://doi.org/10.1016/j.jclepro.2025.146031
- Lai, Q., Liu, J., Haghani, A., Meng, L., Wang, Y. (2020). Energy-efficient speed profile optimization for medium-speed maglev trains. Transportation Research Part E: Logistics and Transportation Review, 141, 102007. https://doi.org/10.1016/j.tre.2020.102007
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Yehor Chupryna, Andrii Mukha, Serhii Plaksin, Dmytro Ustymenko, Oleg Bondar, Oksana Marenych, Oleksandr Holota, Andrii Antoniuk

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.






