Визначення особливостей формування сигналів керування для реалізації тягового режиму натурної моделі магнітолевітаційного транспорту
DOI:
https://doi.org/10.15587/2706-5448.2026.355420Ключові слова:
магнітолевітаційний транспорт, тяговий модуль, натурна модель, плати керування, електродинамічні процеси, тяговий режимАнотація
Об’єктом дослідження є процес формування сигналів керування для реалізації тягового режиму натурної моделі магнітолевітаційного транспорту.
Проблема, яка вирішувалась – це формування сигналів керування для реалізації тягового режиму натурної моделі та способу комутації шляхових котушок.
У дослідній натурній моделі тяговий режим здійснюється сигналами керування, що формуються на основі кутових значень енкодера, які відповідають позиції екіпажу. На їх основі комутуються тягові модулі стенду для забезпечення необхідної полярності магнітного поля, яке створює тягове зусилля та забезпечує просування екіпажу повз секцію.
Реалізація режиму тяги потребує точного визначення позиції екіпажу відносно шляхової структури. Для цього використовується сигнал енкодера, інформація з якого обробляється в блоці керування секцією шляхової структури. Запропоновано схемне рішення та алгоритм роботи цього блоку для натурної моделі.
Пошук елементної бази для плат керування потребує перевірки працездатності. З декількох варіацій плат обрано ту, котра реалізує запропонований алгоритм з задовільною якістю процесу.
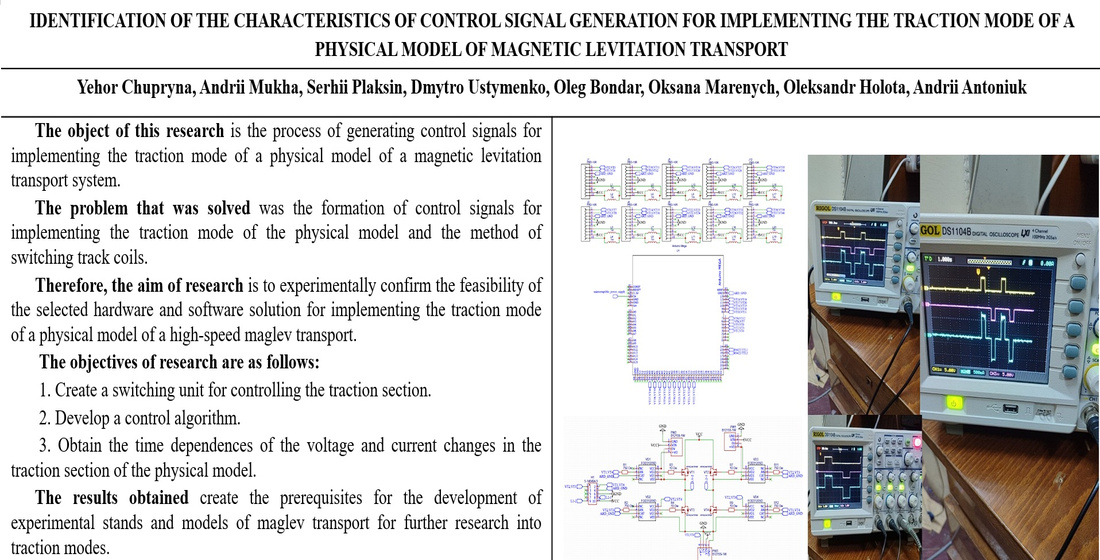
Основним методом дослідження є експеримент, який проведено на стенді натурної моделі. Розроблено та реалізовано комутаційний блок керування тяговою секцією натурного стенду, який містить: плати керування, материнську плату та програмне забезпечення на платформі Arduino. Обрано варіант плати з трьома DC-DC перетворювачами, що забезпечило стабільну роботу тягової секції.
Отримані основні характеристики електродинамічних процесів, а саме: моменти перемикання полярності модулів, зміни напруги, струму та потужності під час проходження екіпажу повз секцію. Діапазон перемикань тягової секції складає приблизно п’ять секунд.
Отримані результати створюють передумови для розробки експериментальних стендів та макетів магнітолевітаційного транспорту для подальшого дослідження тягових режимів.
Посилання
- Holota, O., Ustymenko, D., Mukha, A., Plaksin, S., Chupryna, Y. (2025). Determination of the inductiveness of a physical model of track coils for high-speed transport. Technology Audit and Production Reserves, 3 (1 (83)), 52–57. https://doi.org/10.15587/2706-5448.2025.331995
- Holota, O. O., Mukha, A. M., Ustymenko, D. V., Plaksin, S. V. (2024). Investigation of Processes in the Traction Capacitor Circuit of the Model of High-Speed Magnetolevitation Transport. Science and Transport Progress, 1 (105), 30–41. https://doi.org/10.15802/stp2024/301521
- Holota, O. (2025). Research of control modes of the track structure of a physical model of maglev transport. Transport Systems and Transportation Technologies, 30, 29–36. https://doi.org/10.15802/tstt2025/340121
- Lee, H.-W., Kim, K.-C., Lee, J. (2006). Review of maglev train technologies. IEEE Transactions on Magnetics, 42 (7), 1917–1925. https://doi.org/10.1109/tmag.2006.875842
- He, X. (2025). Magnetic Levitation: Electrodynamic Suspension and Electromagnetic Suspension Technologies. Applied and Computational Engineering, 192 (1), 45–51. https://doi.org/10.54254/2755-2721/2026.ka27983
- Gao, H., Shi, T., Gao, X., Lei, Y., Yan, D., Guo, L., Yan, Y. (2024). Electromagnetic characteristic analysis and design of a linear motor used for ultra-high-speed EMS maglev train. Science China Technological Sciences, 67 (6), 1957–1973. https://doi.org/10.1007/s11431-023-2558-9
- Zhu, Q., Wang, S.-M., Ni, Y.-Q. (2024). A Review of Levitation Control Methods for Low- and Medium-Speed Maglev Systems. Buildings, 14 (3), 837. https://doi.org/10.3390/buildings14030837
- Kuptsov, V., Fajri, P., Rasheduzzaman, Md., Magdaleno-Adame, S., Hadziristic, K. (2022). Combined Propulsion and Levitation Control for Maglev/Hyperloop Systems Utilizing Asymmetric Double-Sided Linear Induction Motors. Machines, 10 (2), 131. https://doi.org/10.3390/machines10020131
- Deng, Z., Shi, H., Chen, Y., Ke, Z., Liang, L., Liu, X., Li, K., Zhang, W. (2025). A cost-effective linear propulsion system featuring PMEDW for HTS maglev vehicle: design, implementation, and dynamic test. Measurement, 240, 115618. https://doi.org/10.1016/j.measurement.2024.115618
- Liu, D., Wu, D., Xu, J., Li, Y., Gul, M. Z., Ni, F. (2025). Machine Learning in Maglev Transportation Systems: Review and Prospects. Actuators, 14 (12), 576. https://doi.org/10.3390/act14120576
- Plaksin, S., Mukha, A., Ustymenko, D., Shkil, Y., Holota, O., Chupryna, Y. (2022). 2-mode traction-levitation module of a promising magnetic-levitation transport system. Electromechanical and Energy Saving Systems, 58 (2), 56–65. https://doi.org/10.30929/2072-2052.2022.2.58.49-53
- Hovorov, P., Khvorost, M., Kindinova, A. (2023). Increasing the Efficiency of Solar Power Plants Based on the Use of Voltage Booster Transformers. 2023 IEEE 5th International Conference on Modern Electrical and Energy System (MEES), 1–5. https://doi.org/10.1109/mees61502.2023.10402408
- Fu, C., Sun, P., Wang, Q., Feng, X. (2025). Modeling and energy-saving operation optimization of high-speed maglev trains. Journal of Cleaner Production, 519, 146031. https://doi.org/10.1016/j.jclepro.2025.146031
- Lai, Q., Liu, J., Haghani, A., Meng, L., Wang, Y. (2020). Energy-efficient speed profile optimization for medium-speed maglev trains. Transportation Research Part E: Logistics and Transportation Review, 141, 102007. https://doi.org/10.1016/j.tre.2020.102007
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2026 Yehor Chupryna, Andrii Mukha, Serhii Plaksin, Dmytro Ustymenko, Oleg Bondar, Oksana Marenych, Oleksandr Holota, Andrii Antoniuk

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.







