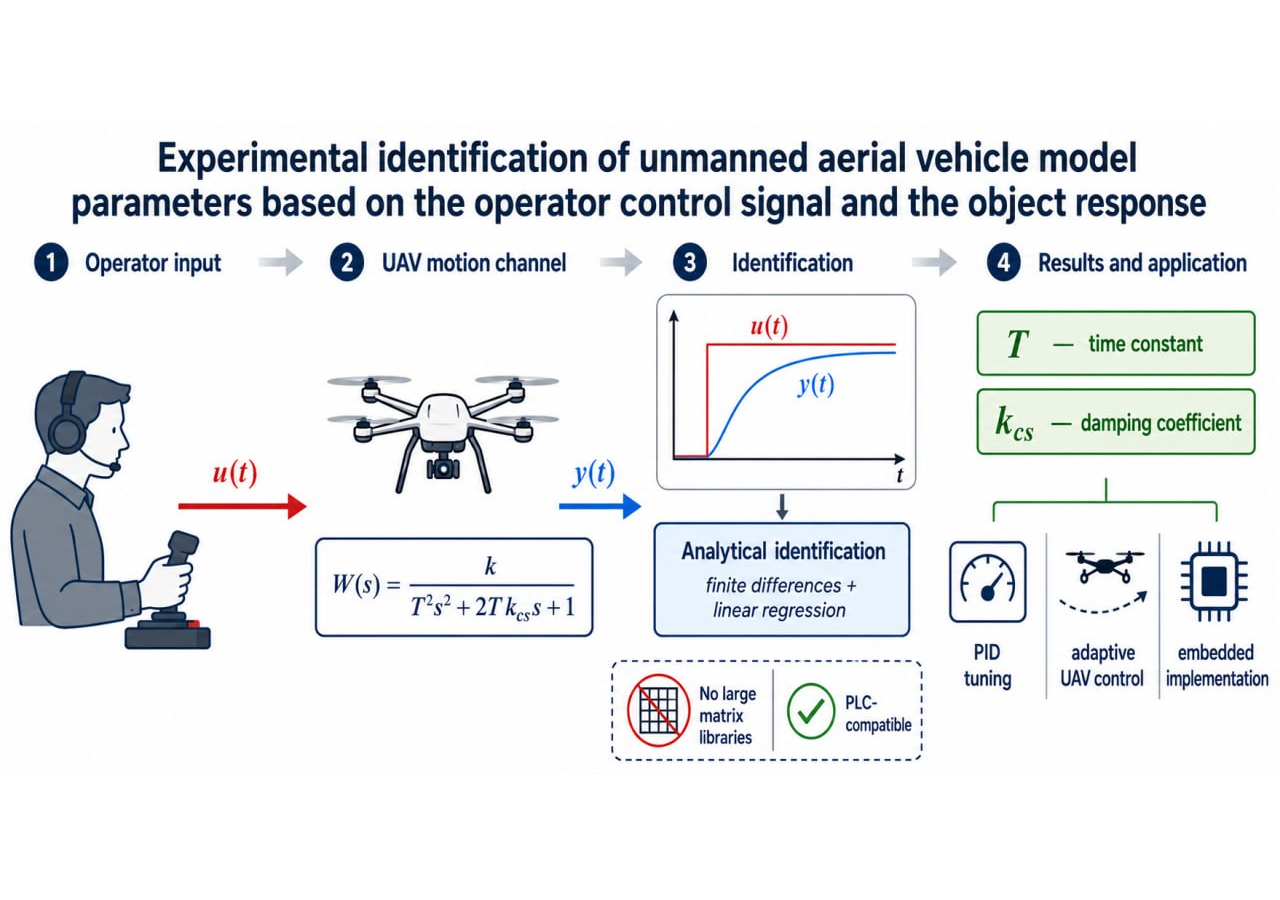
Experimental identification of unmanned aerial vehicle model parameters based on the operator control signal and the object response
DOI:
https://doi.org/10.15587/2706-5448.2026.362822Keywords:
identification, second-order dynamic model, UAV, model parameters, programmable controllerAbstract
The object of research is the process of identifying the parameters of the model of a separate channel of motion of an unmanned aerial vehicle (UAV). The paper addresses the problem of obtaining an accurate and simple computational procedure for estimating the time constant and damping coefficient of a UAV model represented as a second-order dynamic element, suitable for implementation in programmable controllers without the use of matrix libraries. The method is designed for implementation in programmable controllers without the use of matrix libraries. The identification procedure was developed using a dataset that includes 500 experimental UAV motion trials performed by operators in a computer-based simulator. The model parameters cover damping ratios in the range from 0.25 to 1.25 with a fixed time constant of 0.5 s. The obtained results provide an analytical calculation of the model parameters. Based on the theory of linear dynamic systems and the least squares method, the differential equation of the second-order system is transformed into a linear regression form. This is done using central finite differences to compute the first and second derivatives of the output signal. The parameter estimation is performed analytically, without using specialized software functions. This ensures compatibility with programmable logic controllers. To reduce sensitivity to noise during numerical differentiation, the experimental data are pre-smoothed. The analysis interval is limited to the dominant part of the transient response. The identified parameters show good agreement with the true model values. The relative error does not exceed 0.8% for the time constant and 1.2% for the damping ratio. The results can be used for PID controller autotuning and for the synthesis of adaptive control laws for UAVs. The identification procedure can be extended to online parameter estimation during flight, as well as to higher-order and nonlinear dynamic models.
References
- Yu, Y., Tang, P., Song, T., Lin, D. (2020). A two-step method for system identification of low-cost quadrotor. Aerospace Science and Technology, 96, 105551. https://doi.org/10.1016/j.ast.2019.105551
- Zhou, W., Chen, S., Chang, C.-W., Wen, C.-Y., Chen, C.-K., Li, B. (2020). System Identification and Control for a Tail-Sitter Unmanned Aerial Vehicle in the Cruise Flight. IEEE Access, 8, 218348–218359. https://doi.org/10.1109/access.2020.3042316
- Alabsi, M. I., Fields, T. D. (2019). Real-Time Closed-Loop System Identification of a Quadcopter. Journal of Aircraft, 56 (1), 324–335. https://doi.org/10.2514/1.c034219
- Saderla, S., Kim, Y., Ghosh, A. K. (2018). Online system identification of mini cropped delta UAVs using flight test methods. Aerospace Science and Technology, 80, 337–353. https://doi.org/10.1016/j.ast.2018.07.008
- Venkataraman, R., Seiler, P. (2019). System Identification for a Small, Rudderless, Fixed-Wing Unmanned Aircraft. Journal of Aircraft, 56 (3), 1126–1134. https://doi.org/10.2514/1.c035141
- Reinhardt, D., Gryte, K., Arne Johansen, T. (2022). Modeling of the Skywalker X8 Fixed-Wing UAV: Flight Tests and System Identification. 2022 International Conference on Unmanned Aircraft Systems (ICUAS), 506–515. https://doi.org/10.1109/icuas54217.2022.9836104
- Jiang, T., Li, J., Huang, K. (2015). Longitudinal parameter identification of a small unmanned aerial vehicle based on modified particle swarm optimization. Chinese Journal of Aeronautics, 28 (3), 865–873. https://doi.org/10.1016/j.cja.2015.04.005
- Stopkin, V., Nikolenko, A., Kuznetsov, V., Tryputen, M., Kuzenkov, O. (2022). The Urgency of Using Adaptive Observers to Identify the Parameters of the DC Electric Drive. Smart Technologies in Urban Engineering. Springer International Publishing, 213–224. https://doi.org/10.1007/978-3-031-20141-7_20
- Zaitceva, I., Kuznetsov, N. V., Andrievsky, B. (2022). Identification of Human Model Parameters for the Human-Machine Control Systems Design. 2022 8th International Conference on Control, Decision and Information Technologies (CoDIT), 972–977. https://doi.org/10.1109/codit55151.2022.9804146
- Hoshu, A. A., Wang, L., Ansari, S., Sattar, A., Bilal, M. H. A. (2022). System Identification of Heterogeneous Multirotor Unmanned Aerial Vehicle. Drones, 6 (10), 309. https://doi.org/10.3390/drones6100309
- Munguía, R., Urzua, S., Grau, A. (2019). EKF-Based Parameter Identification of Multi-Rotor Unmanned Aerial VehiclesModels. Sensors, 19 (19), 4174. https://doi.org/10.3390/s19194174
- Matos, N. M. B., Marta, A. C. (2024). Longitudinal Motion System Identification of a Fixed-Wing Unmanned Aerial Vehicle Using Limited Unplanned Flight Data. Aerospace, 11 (12), 959. https://doi.org/10.3390/aerospace11120959
- Nonut, A., Kanokmedhakul, Y., Bureerat, S., Kumar, S., Tejani, G. G., Artrit, P. et al. (2022). A small fixed-wing UAV system identification using metaheuristics. Cogent Engineering, 9 (1). https://doi.org/10.1080/23311916.2022.2114196
- Abanou, H., Mansour, M. (2025). Precision Parameter Identification in Quadcopter UAV Systems Using Particle Swarm Algorithm. Journal Européen Des Systèmes Automatisés, 58 (1), 141–148. https://doi.org/10.18280/jesa.580116
- Ayyad, A., Chehadeh, M., Awad, M. I., Zweiri, Y. (2020). Real-Time System Identification Using Deep Learning for Linear Processes With Application to Unmanned Aerial Vehicles. IEEE Access, 8, 122539–122553. https://doi.org/10.1109/access.2020.3006277
- Osadchy, S., Ivliiev, A., Kolisnichenko, S., Tymoshenko, G. (2023). Identification of an unmanned aerial vehicle pilot-operator dynamics model under stochastic conditions. Science and Technology of the Air Force of Ukraine, 2 (51), 46–55. https://doi.org/10.30748/nitps.2023.51.06.
- Rodinkov, Y., Savitskiy, A. (2024). Mathematical model of unmanned aerial vehicles control. Herald of Khmelnytskyi National University. Technical Sciences, 337 (3 (2)), 298–304. https://doi.org/10.31891/2307-5732-2024-337-3-45
- Puleko, I., Andreev, O., Dubina, O., Chumakevych, V., Palamarchuk А. (2023). Model of motion of unmanned aerial vehicles based on dual quaternion algebra. Problems of construction, testing, application and operation of complex information systems, 23, 52–61. https://doi.org/10.46972/2076-1546.2022.23.04
- Sanders, F. C., Tischler, M., Berger, T., Berrios, M. G., Gong, A. (2018). System Identification and Multi-Objective Longitudinal Control Law Design for a Small Fixed-Wing UAV. 2018 AIAA Atmospheric Flight Mechanics Conference. https://doi.org/10.2514/6.2018-0296
- Tiutiunyk, V., Levterov, O., Tiutiunyk, O., Usachov, D. (2025). Acoustic method for identifying the use of unmanned aerial vehicles as sources of emergencies. Social Development and Security, 15 (1), 300–312. https://doi.org/10.33445/sds.2025.15.1.26
- Tryputen, M., Kuznetsov, V., Kuznetsov, V., Kuznetsova, Y., Tryputen, M., Kuznetsova, A. (2020). Laboratory bench to analyze of automatic control system with a fuzzy controller. Diagnostyka, 21 (2), 61–68. https://doi.org/10.29354/diag/122357
- Tryputen, M., Kuznetsov, V., Serdiuk, T., Kuznetsova, A., Tryputen, M. Babyak, M. (2019). One Approach to Quasi-Optimal Control of Direct Current Motor. 2019 IEEE 5th International Conference Actual Problems of Unmanned Aerial Vehicles Developments (APUAVD), 190–193. https://doi.org/10.1109/apuavd47061.2019.8943878
- Dymerets, A. V., Yershov, R. D., Gorodny, A. N., Denisov, Y. O., Boiko, S., Kuznetsov, V. (2020). Dynamic Characteristics of Zero-Current-Switching Quasi-Resonant Buck Converter under Variation of Resonant Circuit and Load Parameters. 2020 IEEE 40th International Conference on Electronics and Nanotechnology (ELNANO), 848–853. https://doi.org/10.1109/elnano50318.2020.9088879
- Tryputen, M., Kuznetsov, V., Kuznetsova, A., Tryputen, M., Kuznetsova, Y., Serdiuk, T. (2020). Improving the Reliability of Simulating the Operation of an Induction Motor in Solving the Technical and Economic Problem. Advances in Computer Science for Engineering and Education III, 143–152. https://doi.org/10.1007/978-3-030-55506-1_13
- Kuzenkov, O., Kuznetsov, V., Tryputen, N. (2019). Analysis of Phase Trajectories of the Third – Order Dynamic Objects. 2019 IEEE 2nd Ukraine Conference on Electrical and Computer Engineering (UKRCON), 1235–1243. https://doi.org/10.1109/ukrcon.2019.8879819
- Falkenberg, O., Witt, J., Pilz, U., Weltin, U., and Werner, H. (2012). Model identification and H∞ attitude control for quadrotor MAV’s. ICIRA 2012. Available at: https://www.researchgate.net/publication/233904706_Model_Identication_and_H_Attitude_Control_for_Quadrotor_MAV's
- Kelm, B., Myschik, S. (2023). Model-Based Control Reconfiguration of a Multirotor UAV using Online System Identification by Sparse Regression (SINDYc). AIAA AVIATION 2023 Forum. https://doi.org/10.2514/6.2023-4464
- Liu, J.-C., Geng, L.-H. (2020). Attitude model identification of a quadrotor using the subspace identification method. 2020 39th Chinese Control Conference (CCC), 1227–1232. https://doi.org/10.23919/ccc50068.2020.9188994
- Nakayama, M., Oku, H., Ushida, S. (2018). An Experiment on Closed-loop System Identification of UAV Using Dual-rate Sampling. IFAC-PapersOnLine, 51 (15), 598–603. https://doi.org/10.1016/j.ifacol.2018.09.226
- van der Veen, G., van Wingerden, J.-W., Bergamasco, M., Lovera, M., Verhaegen, M. (2013). Closed‐loop subspace identification methods: an overview. IET Control Theory & Applications, 7 (10), 1339–1358. https://doi.org/10.1049/iet-cta.2012.0653
- Wi, Y., Cescon, M. (2024). Data-driven identification of quadrotor dynamics: a tutorial. IFAC-PapersOnLine, 58 (15), 229–234. https://doi.org/10.1016/j.ifacol.2024.08.533
- Zhao, J., Wang, X., Gao, G., Na, J., Liu, H., Luan, F. (2018). Online Adaptive Parameter Estimation for Quadrotors. Algorithms, 11 (11), 167. https://doi.org/10.3390/a11110167
- Saeed, A., Bhatti, A. I., Malik, F. M. (2023). LMIs-Based LPV Control of Quadrotor with Time-Varying Payload. Applied Sciences, 13 (11), 6553. https://doi.org/10.3390/app13116553
- Horri, N., Pietraszko, M. (2022). A Tutorial and Review on Flight Control Co-Simulation Using Matlab/Simulink and Flight Simulators. Automation, 3 (3), 486–510. https://doi.org/10.3390/automation3030025
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Oleksii Chornyi, Valerii Tytiuk, Victor Busher, Yurii Zachepa, Volodymyr Grabko, Andrii Romanets, Yuliia Mala, Dmytro Bilukhin, Mykola Babyak, Olena Huliesha

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.





