Експериментальна ідентифікація параметрів моделі безпілотного літального апарата за сигналом керування оператора та реакцією об’єкта
DOI:
https://doi.org/10.15587/2706-5448.2026.362822Ключові слова:
ідентифікація, динамічна модель другого порядку, БПЛА, параметри моделі, програмований контролерАнотація
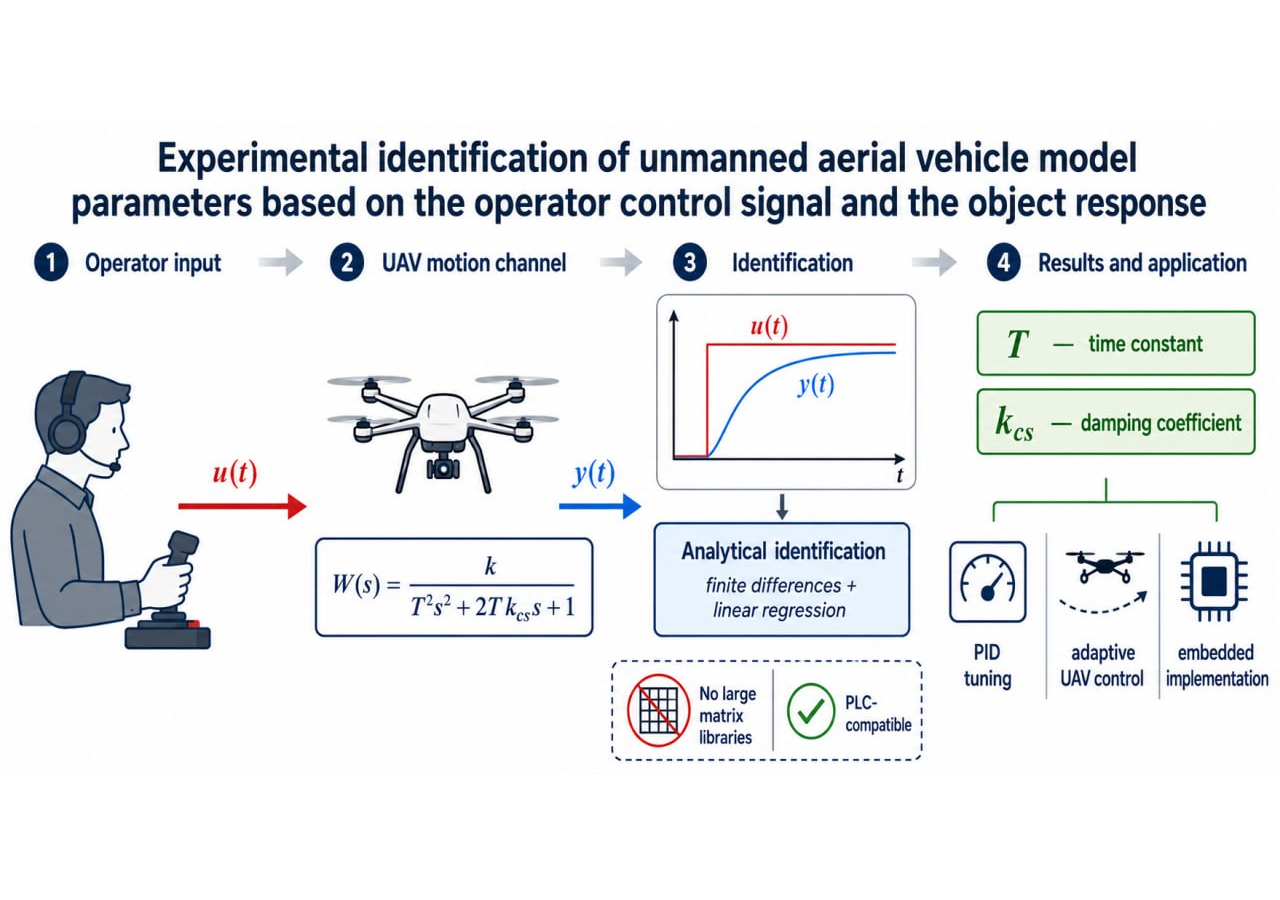
Об’єктом дослідження є процес ідентифікації параметрів моделі окремого каналу руху безпілотного літального апарата (БПЛА). В роботі розв’язується проблема отримання точної та простої обчислювальної процедури оцінювання сталої часу та коефіцієнта демпфування моделі БПЛА, представленої у вигляді динамічної ланки другого порядку, придатної для реалізації у програмованих контролерах без застосування матричних бібліотек. Процедуру ідентифікації розроблено на наборі даних, що містить 500 експериментальних випробувань руху БПЛА оператором на комп’ютерному тренажері з параметрами моделі, що охоплюють коефіцієнти затухання від 0,25 до 1,25 та фіксовану постійну часу 0,5 с. Отримані результати забезпечують аналітичний розрахунок параметрів моделі. Ґрунтуючись на теорії лінійних динамічних систем та методі найменших квадратів, диференціальне рівняння ланки другого порядку перетворюється на форму лінійної регресії шляхом застосування центральних скінченних різниць для числового диференціювання першої та другої похідних вихідного сигналу. Оцінка параметрів виконується аналітично, без використання спеціалізованих програмних функцій, що забезпечує сумісність з програмованими логічними контролерами. Для зменшення чутливості до шуму під час числового диференціювання експериментальні дані попередньо згладжуються, а інтервал аналізу обмежується домінуючою частиною перехідної характеристики. Отримані параметри демонструють відповідність з заданими параметрами моделі: відносні відхилення не перевищують 0,8% для постійної часу та 1,2% для коефіцієнта затухання. Результати можуть бути застосовані для автоналаштування ПІД-регуляторів та синтезу адаптивних законів БПЛА. Процедуру ідентифікації легко розширити до онлайн-оцінки параметрів під час польоту, а також до динамічних моделей вищого порядку та нелінійних динамічних моделей.
Посилання
- Yu, Y., Tang, P., Song, T., Lin, D. (2020). A two-step method for system identification of low-cost quadrotor. Aerospace Science and Technology, 96, 105551. https://doi.org/10.1016/j.ast.2019.105551
- Zhou, W., Chen, S., Chang, C.-W., Wen, C.-Y., Chen, C.-K., Li, B. (2020). System Identification and Control for a Tail-Sitter Unmanned Aerial Vehicle in the Cruise Flight. IEEE Access, 8, 218348–218359. https://doi.org/10.1109/access.2020.3042316
- Alabsi, M. I., Fields, T. D. (2019). Real-Time Closed-Loop System Identification of a Quadcopter. Journal of Aircraft, 56 (1), 324–335. https://doi.org/10.2514/1.c034219
- Saderla, S., Kim, Y., Ghosh, A. K. (2018). Online system identification of mini cropped delta UAVs using flight test methods. Aerospace Science and Technology, 80, 337–353. https://doi.org/10.1016/j.ast.2018.07.008
- Venkataraman, R., Seiler, P. (2019). System Identification for a Small, Rudderless, Fixed-Wing Unmanned Aircraft. Journal of Aircraft, 56 (3), 1126–1134. https://doi.org/10.2514/1.c035141
- Reinhardt, D., Gryte, K., Arne Johansen, T. (2022). Modeling of the Skywalker X8 Fixed-Wing UAV: Flight Tests and System Identification. 2022 International Conference on Unmanned Aircraft Systems (ICUAS), 506–515. https://doi.org/10.1109/icuas54217.2022.9836104
- Jiang, T., Li, J., Huang, K. (2015). Longitudinal parameter identification of a small unmanned aerial vehicle based on modified particle swarm optimization. Chinese Journal of Aeronautics, 28 (3), 865–873. https://doi.org/10.1016/j.cja.2015.04.005
- Stopkin, V., Nikolenko, A., Kuznetsov, V., Tryputen, M., Kuzenkov, O. (2022). The Urgency of Using Adaptive Observers to Identify the Parameters of the DC Electric Drive. Smart Technologies in Urban Engineering. Springer International Publishing, 213–224. https://doi.org/10.1007/978-3-031-20141-7_20
- Zaitceva, I., Kuznetsov, N. V., Andrievsky, B. (2022). Identification of Human Model Parameters for the Human-Machine Control Systems Design. 2022 8th International Conference on Control, Decision and Information Technologies (CoDIT), 972–977. https://doi.org/10.1109/codit55151.2022.9804146
- Hoshu, A. A., Wang, L., Ansari, S., Sattar, A., Bilal, M. H. A. (2022). System Identification of Heterogeneous Multirotor Unmanned Aerial Vehicle. Drones, 6 (10), 309. https://doi.org/10.3390/drones6100309
- Munguía, R., Urzua, S., Grau, A. (2019). EKF-Based Parameter Identification of Multi-Rotor Unmanned Aerial VehiclesModels. Sensors, 19 (19), 4174. https://doi.org/10.3390/s19194174
- Matos, N. M. B., Marta, A. C. (2024). Longitudinal Motion System Identification of a Fixed-Wing Unmanned Aerial Vehicle Using Limited Unplanned Flight Data. Aerospace, 11 (12), 959. https://doi.org/10.3390/aerospace11120959
- Nonut, A., Kanokmedhakul, Y., Bureerat, S., Kumar, S., Tejani, G. G., Artrit, P. et al. (2022). A small fixed-wing UAV system identification using metaheuristics. Cogent Engineering, 9 (1). https://doi.org/10.1080/23311916.2022.2114196
- Abanou, H., Mansour, M. (2025). Precision Parameter Identification in Quadcopter UAV Systems Using Particle Swarm Algorithm. Journal Européen Des Systèmes Automatisés, 58 (1), 141–148. https://doi.org/10.18280/jesa.580116
- Ayyad, A., Chehadeh, M., Awad, M. I., Zweiri, Y. (2020). Real-Time System Identification Using Deep Learning for Linear Processes With Application to Unmanned Aerial Vehicles. IEEE Access, 8, 122539–122553. https://doi.org/10.1109/access.2020.3006277
- Osadchy, S., Ivliiev, A., Kolisnichenko, S., Tymoshenko, G. (2023). Identification of an unmanned aerial vehicle pilot-operator dynamics model under stochastic conditions. Science and Technology of the Air Force of Ukraine, 2 (51), 46–55. https://doi.org/10.30748/nitps.2023.51.06.
- Rodinkov, Y., Savitskiy, A. (2024). Mathematical model of unmanned aerial vehicles control. Herald of Khmelnytskyi National University. Technical Sciences, 337 (3 (2)), 298–304. https://doi.org/10.31891/2307-5732-2024-337-3-45
- Puleko, I., Andreev, O., Dubina, O., Chumakevych, V., Palamarchuk А. (2023). Model of motion of unmanned aerial vehicles based on dual quaternion algebra. Problems of construction, testing, application and operation of complex information systems, 23, 52–61. https://doi.org/10.46972/2076-1546.2022.23.04
- Sanders, F. C., Tischler, M., Berger, T., Berrios, M. G., Gong, A. (2018). System Identification and Multi-Objective Longitudinal Control Law Design for a Small Fixed-Wing UAV. 2018 AIAA Atmospheric Flight Mechanics Conference. https://doi.org/10.2514/6.2018-0296
- Tiutiunyk, V., Levterov, O., Tiutiunyk, O., Usachov, D. (2025). Acoustic method for identifying the use of unmanned aerial vehicles as sources of emergencies. Social Development and Security, 15 (1), 300–312. https://doi.org/10.33445/sds.2025.15.1.26
- Tryputen, M., Kuznetsov, V., Kuznetsov, V., Kuznetsova, Y., Tryputen, M., Kuznetsova, A. (2020). Laboratory bench to analyze of automatic control system with a fuzzy controller. Diagnostyka, 21 (2), 61–68. https://doi.org/10.29354/diag/122357
- Tryputen, M., Kuznetsov, V., Serdiuk, T., Kuznetsova, A., Tryputen, M. Babyak, M. (2019). One Approach to Quasi-Optimal Control of Direct Current Motor. 2019 IEEE 5th International Conference Actual Problems of Unmanned Aerial Vehicles Developments (APUAVD), 190–193. https://doi.org/10.1109/apuavd47061.2019.8943878
- Dymerets, A. V., Yershov, R. D., Gorodny, A. N., Denisov, Y. O., Boiko, S., Kuznetsov, V. (2020). Dynamic Characteristics of Zero-Current-Switching Quasi-Resonant Buck Converter under Variation of Resonant Circuit and Load Parameters. 2020 IEEE 40th International Conference on Electronics and Nanotechnology (ELNANO), 848–853. https://doi.org/10.1109/elnano50318.2020.9088879
- Tryputen, M., Kuznetsov, V., Kuznetsova, A., Tryputen, M., Kuznetsova, Y., Serdiuk, T. (2020). Improving the Reliability of Simulating the Operation of an Induction Motor in Solving the Technical and Economic Problem. Advances in Computer Science for Engineering and Education III, 143–152. https://doi.org/10.1007/978-3-030-55506-1_13
- Kuzenkov, O., Kuznetsov, V., Tryputen, N. (2019). Analysis of Phase Trajectories of the Third – Order Dynamic Objects. 2019 IEEE 2nd Ukraine Conference on Electrical and Computer Engineering (UKRCON), 1235–1243. https://doi.org/10.1109/ukrcon.2019.8879819
- Falkenberg, O., Witt, J., Pilz, U., Weltin, U., and Werner, H. (2012). Model identification and H∞ attitude control for quadrotor MAV’s. ICIRA 2012. Available at: https://www.researchgate.net/publication/233904706_Model_Identication_and_H_Attitude_Control_for_Quadrotor_MAV's
- Kelm, B., Myschik, S. (2023). Model-Based Control Reconfiguration of a Multirotor UAV using Online System Identification by Sparse Regression (SINDYc). AIAA AVIATION 2023 Forum. https://doi.org/10.2514/6.2023-4464
- Liu, J.-C., Geng, L.-H. (2020). Attitude model identification of a quadrotor using the subspace identification method. 2020 39th Chinese Control Conference (CCC), 1227–1232. https://doi.org/10.23919/ccc50068.2020.9188994
- Nakayama, M., Oku, H., Ushida, S. (2018). An Experiment on Closed-loop System Identification of UAV Using Dual-rate Sampling. IFAC-PapersOnLine, 51 (15), 598–603. https://doi.org/10.1016/j.ifacol.2018.09.226
- van der Veen, G., van Wingerden, J.-W., Bergamasco, M., Lovera, M., Verhaegen, M. (2013). Closed‐loop subspace identification methods: an overview. IET Control Theory & Applications, 7 (10), 1339–1358. https://doi.org/10.1049/iet-cta.2012.0653
- Wi, Y., Cescon, M. (2024). Data-driven identification of quadrotor dynamics: a tutorial. IFAC-PapersOnLine, 58 (15), 229–234. https://doi.org/10.1016/j.ifacol.2024.08.533
- Zhao, J., Wang, X., Gao, G., Na, J., Liu, H., Luan, F. (2018). Online Adaptive Parameter Estimation for Quadrotors. Algorithms, 11 (11), 167. https://doi.org/10.3390/a11110167
- Saeed, A., Bhatti, A. I., Malik, F. M. (2023). LMIs-Based LPV Control of Quadrotor with Time-Varying Payload. Applied Sciences, 13 (11), 6553. https://doi.org/10.3390/app13116553
- Horri, N., Pietraszko, M. (2022). A Tutorial and Review on Flight Control Co-Simulation Using Matlab/Simulink and Flight Simulators. Automation, 3 (3), 486–510. https://doi.org/10.3390/automation3030025
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2026 Oleksii Chornyi, Valerii Tytiuk, Victor Busher, Yurii Zachepa, Volodymyr Grabko, Andrii Romanets, Yuliia Mala, Dmytro Bilukhin, Mykola Babyak, Olena Huliesha

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.






