Дослідження та аналіз поведінки вантажу баштового крана при обриві канату
DOI:
https://doi.org/10.15587/2706-5448.2024.302248Ключові слова:
баштовий кран, розрив стропа, дволанковий маятник, коливання вантажу, рівняння Лагранжа, нелінійні диференціальні рівнянняАнотація
Об'єктом дослідження є поведінка вантажу баштового крана під час обриву стропа. Одним з найбільш проблемних місць є безпека роботи та запобігання аварійним ситуаціям. Незважаючи на наявність обов'язкових заходів безпеки, під час транспортування вантажу одна з гілок стропа може бути зруйнована через наявність динамічної складової під час роботи крана, або помилок стропальника при кріпленні вантажу. Також не можна виключити наявність прихованих внутрішніх або непомічених дефектів в самій конструкції стропа. Також одним з найбільш проблемних місць є хаотичні коливання вантажу, які негативно впливають на стійкість крана та на безпеку. У роботі наведено випадок руйнування однієї з гілок двоканатного стропа під час транспортування довгомірного виробу баштовим краном.
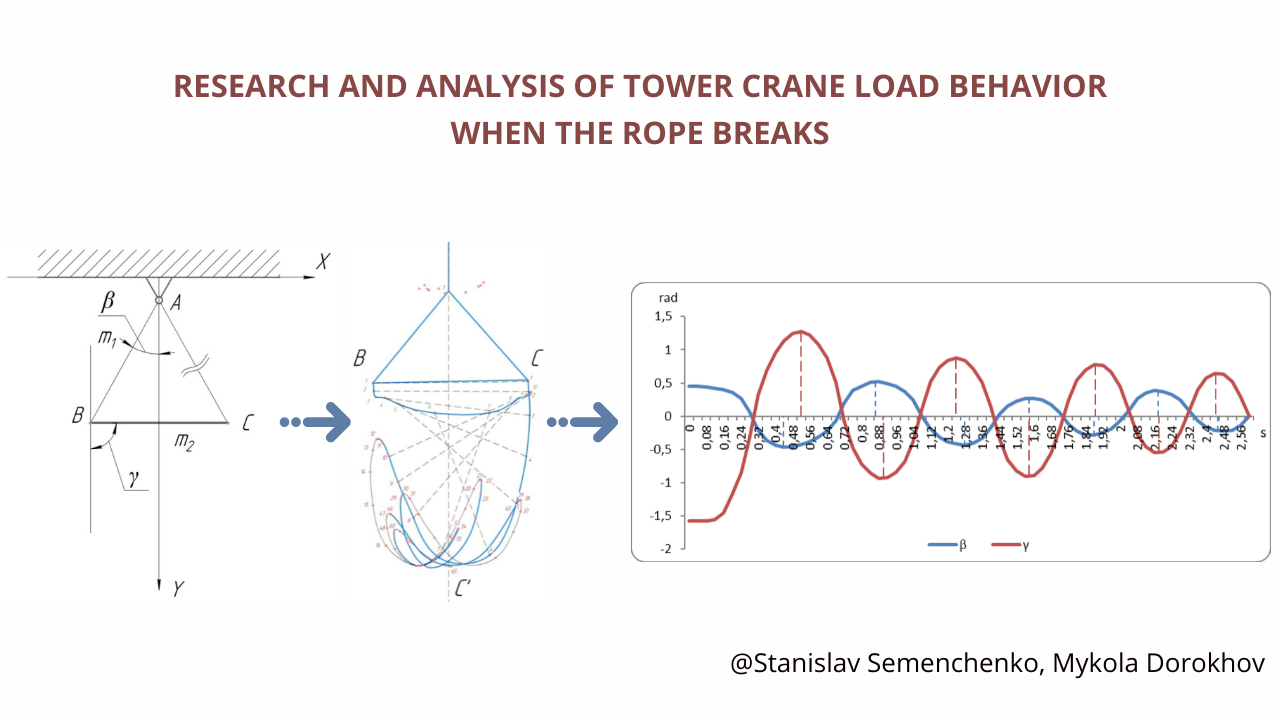
Запропонований метод аналізу поведінки вантажу базується на використанні динамічного опису режимів обриву тросових систем у рамках постановки та вирішення диференціально-алгебраїчних рівнянь. Це дозволяє більш точно описати поведінку вантажу при обриві стропа.
Отримані результати показали, що застосування запропонованого методу дозволяє значно приблизити математичну модель дволанкового математичного маятника до дійсних взаємних коливань вантажу під час обриву стропа. Це пов'язано з тим, що запропонований метод має ряд особливостей, зокрема високу чутливість до змін у поведінці вантажу та швидку реакцію на обрив канату.
Ці результати можуть бути використані на практиці при проектуванні та експлуатації баштових кранів. Завдяки застосуванню запропонованого методу забезпечується можливість отримання точних значень показників поведінки вантажу та своєчасного виявлення обриву канату. У порівнянні з аналогічними відомими методами, цей метод має такі переваги, як висока ефективність, надійність і безпека роботи.
Посилання
- Semeniuk, V. F., Stukalenko, M. I., Stukalenko, A. M. (1997). Opredelenie dinamicheskikh nagruzok v mostovom krane pri obryve kanata. Trudy Odesskogo politekhnicheskogo universiteta, 1, 94–97.
- Stukalenko, M. I. (2009). Povyshenie nadezhnosti uderzhaniia gruza pri obryve kanata v mostovom krane. Bezopasnost truda v promyshlennosti, 5, 21–25.
- Loveikin, V. S., Nesterov, A. P. (2002). Dinamicheskaia optimizatciia podemnykh mashin. Lugansk: Vid-vo SNU, 368.
- Loveikіn, V. S., Romasevich, Iu. O. (2011). Kompleksnyi sintez optimalnogo upravleniia dvizheniem gruzopodemnogo krana. Avtomatizatciia proizvodstvennykh protcessov v mashinostroenii i priborostroenii, 45, 385–399.
- Shamolin, M. V. (2008). Dinamicheskie sistemy s peremennoi dissipatciei: podkhody, metody, prilozheniia. Fundamentalna ta prikladna matematika, 3 (14), 32–37.
- Espíndola, R., Del Valle, G., Hernández, G., Pineda, I., Muciño, D., Díaz, P., Guijosa, S. (2019). The Double Pendulum of Variable Mass: Numerical Study for different cases. Journal of Physics: Conference Series, 1221 (1), 012049. doi: https://doi.org/10.1088/1742-6596/1221/1/012049
- Pravyla okhorony pratsi pid chas ekspluatatsii pidiomnykh kraniv, pidiomnykh prystroiv ta vidpovidnoho obladnannia: NPAOP 0.00-1.80-18: zaminiuie NPAOP 0.00-1.01-07 (2018). Zatv. Ministerstvo sotsialnoi polityky Ukrainy 19.01.2018. Kyiv: Ministerstvo sotsialnoi polityky Ukrainy, 214.
- Kwiatkowski, R., Hoffmann, T. J., Kołodziej, A. (2017). Dynamics of a Double Mathematical Pendulum with Variable Mass in Dimensionless Coordinates. Procedia Engineering, 177, 439–443. doi: https://doi.org/10.1016/j.proeng.2017.02.242
- Li, D., Xie, T., Li, G., Yao, J., Hu, S. (2024). Adaptive coupling tracking control strategy for double-pendulum bridge crane with load hoisting/lowering. Nonlinear Dynamics. doi: https://doi.org/10.1007/s11071-024-09474-2
- Alevras, P., Brown, I., Yurchenko, D. (2015). Experimental investigation of a rotating parametric pendulum. Nonlinear Dynamics, 81 (1-2), 201–213. doi: https://doi.org/10.1007/s11071-015-1982-8
- Radomski, A. P., Sierociński, D. J., Chiliński, B. D. (2024). Proposition of a structural health monitoring model for a concept of an innovative variable mass pendular tuned mass damper. Diagnostyka, 1–10. doi: https://doi.org/10.29354/diag/185458
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2024 Stanislav Semenchenko, Mykola Dorokhov

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.






