Determining the statistical properties of a robust control object identification algorithm using mixed correntropy
DOI:
https://doi.org/10.15587/1729-4061.2026.353218Keywords:
robust resilience, correntropy, kernel, algorithm convergence, steady state mode of motion, simulation modelingAbstract
Identification process in stationary and non-stationary control objects has been investigated in this study. The task addressed is to construct mathematical models, to devise methods and procedures, and to develop programs focused on solving object identification problems.
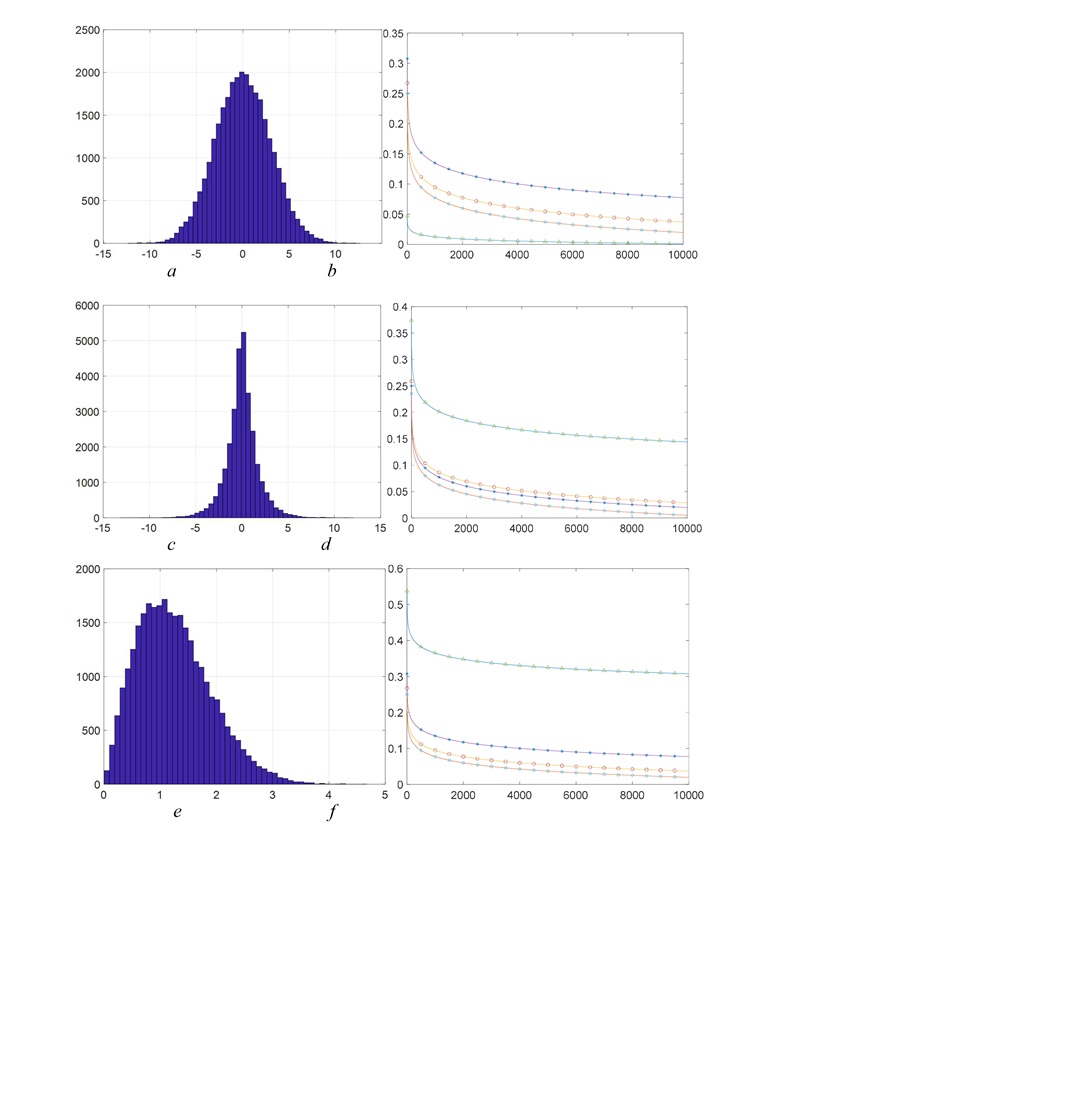
This paper tackles the issue of robust identification of control objects under the action of additive random noise of various statistical nature, in particular Gaussian and non-Gaussian noise. An approach to building identification algorithms based on the mixed correntropy criterion has been proposed, which combines the advantages of classical mean-square methods and information-theoretic optimality criteria.
The use of Price's theorem made it possible to define convergence conditions for the robust identification algorithm in both stationary and non-stationary cases in the presence of Gaussian and non-Gaussian noise. The influence of algorithm parameters and noise characteristics on its dynamic properties has been established. Expressions for determining the optimal values of the algorithm's convergence parameter, which ensure the maximum convergence rate, have been derived.
To confirm theoretical findings, simulation modeling was carried out, the results of which confirm the effectiveness of the proposed approach and its advantages compared to conventional identification methods, especially under conditions of non-Gaussian noise and nonstationarity, which indicates the feasibility of its use in adaptive and robust control systems.
However, the resulting estimates are rather general and depend both on the degree of nonstationarity of the object and on the statistical characteristics of usable signals and disturbances, which are often unknown. Therefore, the results could be applied in practice if such information is available or when estimates of these characteristics are used
References
- Frank, S. A. (2018). Control Theory Tutorial. In SpringerBriefs in Applied Sciences and Technology. Springer International Publishing. https://doi.org/10.1007/978-3-319-91707-8
- Petropoulos, F., Apiletti, D., Assimakopoulos, V., Babai, M. Z., Barrow, D. K., Ben Taieb, S. et al. (2022). Forecasting: theory and practice. International Journal of Forecasting, 38 (3), 705–871. https://doi.org/10.1016/j.ijforecast.2021.11.001
- Nasrabad, N. M. (2006). Pattern Recognition and Machine Learning. Journal of Electronic Imaging, 16 (4). https://doi.org/10.1117/1.2819119
- Huber, P. J., Ronchetti, E. M. (2009). Robust Statistics. Wiley Series in Probability and Statistics. https://doi.org/10.1002/9780470434697
- Hampel, F. R., Ronchetti, E. M., Rousseeuw, P. J., Stahel, W. A. (2005). Robust Statistics. Wiley Series in Probability and Statistics. https://doi.org/10.1002/9781118186435
- Chambers, J. A., Tanrikulu, O., Constantinides, A. G. (1994). Least mean mixed-norm adaptive filtering. Electronics Letters, 30 (19), 1574–1575. https://doi.org/10.1049/el:19941060
- Arenas-García, J., Figueiras-Vidal, A. R. (2005). Adaptive combination of normalised filters for robust system identification. Electronics Letters, 41 (15), 874–875. https://doi.org/10.1049/el:20051936
- Rudenko, O., Bezsonov, O., Lebediev, O., Serdiuk, N. (2019). Robust identification of non-stationary objects with nongaussian interference. Eastern-European Journal of Enterprise Technologies, 5 (4 (101)), 44–52. https://doi.org/10.15587/1729-4061.2019.181256
- Pazaitis, D. I., Constantinides, A. G. (1999). A novel kurtosis driven variable step-size adaptive algorithm. IEEE Transactions on Signal Processing, 47 (3), 864–872. https://doi.org/10.1109/78.747793
- Principe, J. C. (2010). Information Theoretic Learning. In Information Science and Statistics. Springer New York. https://doi.org/10.1007/978-1-4419-1570-2
- Principe, J. C., Xu, D., Zhao, Q., Fisher, J. W. (2000). Learning from Examples with Information Theoretic Criteria. Journal of VLSI Signal Processing Systems for Signal, Image and Video Technology, 26 (1-2), 61–77. https://doi.org/10.1023/a:1008143417156
- Chen, B., Zhu, Y., Hu, J., Principe, J. C. (2013). System Parameter Identification: Information Criteria and Algorithms. Elsevier Inc., 249. https://doi.org/10.1016/c2012-0-01233-1
- Santamaria, I., Pokharel, P. P., Principe, J. C. (2006). Generalized correlation function: definition, properties, and application to blind equalization. IEEE Transactions on Signal Processing, 54 (6), 2187–2197. https://doi.org/10.1109/tsp.2006.872524
- Liu, W., Pokharel, P. P., Principe, J. C. (2007). Correntropy: Properties and Applications in Non-Gaussian Signal Processing. IEEE Transactions on Signal Processing, 55 (11), 5286–5298. https://doi.org/10.1109/tsp.2007.896065
- Flores, T. K. S., Villanueva, J. M. M., Gomes, H. P., Catunda, S. Y. C. (2021). Adaptive Pressure Control System Based on the Maximum Correntropy Criterion. Sensors, 21 (15), 5156. https://doi.org/10.3390/s21155156
- Leite, G. R., Araújo, Í. B. Q. de, Martins, A. de M. (2023). Regularized Maximum Correntropy Criterion Kalman Filter for Uncalibrated Visual Servoing in the Presence of Non-Gaussian Feature Tracking Noise. Sensors, 23 (20), 8518. https://doi.org/10.3390/s23208518
- Wu, C., Lin, D., Zheng, Y., He, F., Wang, S. (2026). Maximum correntropy criterion-based Kalman filter for replay attack in non-Gaussian noises. Signal Processing, 238, 110098. https://doi.org/10.1016/j.sigpro.2025.110098
- Rudenko, O., Bezsonov, O., Borysenko, V., Borysenko, T., Lyashenko, S. (2021). Developing a multi-step recurrent algorithm to maximize the criteria of correntropy. Eastern-European Journal of Enterprise Technologies, 1 (4 (109)), 54–63. https://doi.org/10.15587/1729-4061.2021.225765
- Chen, B., Wang, X., Li, Y., Principe, J. C. (2019). Maximum Correntropy Criterion With Variable Center. IEEE Signal Processing Letters, 26 (8), 1212–1216. https://doi.org/10.1109/lsp.2019.2925692
- Rudenko, O., Bezsonov, O. (2022). Adaptive identification under the maximum correntropy criterion with variable center. RADIOELECTRONIC AND COMPUTER SYSTEMS, 1, 216–228. https://doi.org/10.32620/reks.2022.1.17
- Hu, C., Wang, G., Ho, K. C., Liang, J. (2021). Robust Ellipse Fitting With Laplacian Kernel Based Maximum Correntropy Criterion. IEEE Transactions on Image Processing, 30, 3127–3141. https://doi.org/10.1109/tip.2021.3058785
- Ye, X., Lu, S., Wang, J., Wu, D., Zhang, Y. (2023). Robust State Estimation Using the Maximum Correntropy Cubature Kalman Filter with Adaptive Cauchy-Kernel Size. Electronics, 13 (1), 114. https://doi.org/10.3390/electronics13010114
- Chen, B., Xie, Y., Wang, X., Yuan, Z., Ren, P., Qin, J. (2022). Multikernel Correntropy for Robust Learning. IEEE Transactions on Cybernetics, 52 (12), 13500–13511. https://doi.org/10.1109/tcyb.2021.3110732
- Xue, N., Luo, X., Gao, Y., Wang, W., Wang, L., Huang, C., Zhao, W. (2019). Kernel Mixture Correntropy Conjugate Gradient Algorithm for Time Series Prediction. Entropy, 21 (8), 785. https://doi.org/10.3390/e21080785
- Li, X., Guo, Y., Meng, Q. (2022). Variational Bayesian-Based Improved Maximum Mixture Correntropy Kalman Filter for Non-Gaussian Noise. Entropy, 24 (1), 117. https://doi.org/10.3390/e24010117
- Li, G., Zhang, H., Wang, S., Wang, G., Zhao, J. (2025). Generalized mixed-norm maximum correntropy for robust adaptive filtering. Applied Acoustics, 228, 110382. https://doi.org/10.1016/j.apacoust.2024.110382
- Yuan, C., Zhou, C., Peng, J., Li, H. (2024). Mixture correntropy-based robust distance metric learning for classification. Knowledge-Based Systems, 295, 111791. https://doi.org/10.1016/j.knosys.2024.111791
- Bai, X., Ge, Q., Zeng, P. (2025). DCM_MCCKF: A non-Gaussian state estimator with adaptive kernel size based on CS divergence. Neurocomputing, 617, 128809. https://doi.org/10.1016/j.neucom.2024.128809
- Li, S., Xu, S., Jin, X., Tan, P. (2025). Comparison of Kernel Functions in Generalized M-estimation Using Fixed-Point Iteration. Advances in Guidance, Navigation and Control, 596–605. https://doi.org/10.1007/978-981-96-2216-0_57
- Price, R. (1958). A useful theorem for nonlinear devices having Gaussian inputs. IEEE Transactions on Information Theory, 4 (2), 69–72. https://doi.org/10.1109/tit.1958.1057444
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Oleksandr Bezsonov, Serhii Liashenko, Oleg Rudenko, Serhii Rudenko, Kyrylo Oliinyk

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.






