Development of a hexacopter model for transporting medicines with noise reduction
DOI:
https://doi.org/10.15587/1729-4061.2024.315525Keywords:
hexacopter, unmanned aerial vehicle, noise reduction, frequency spectrum, Kalman filterAbstract
The object of research is a helicopter-type copter. For the test flight of the prototype, high level of noise in the Wi-Fi block channel was noticed. To solve the problem Kalman filter was installed to the system between the antenna and microprocessor, for noise cancellation. A technical model that takes into consideration the time variation of the interference/signal ratio at the input of the UAV receiver for given trajectories and speeds of movement of objects and the source of interference has been developed that allows the delivery of medications up to 2 kg with a flight range of 5 km when exposed to interference from a moving source.
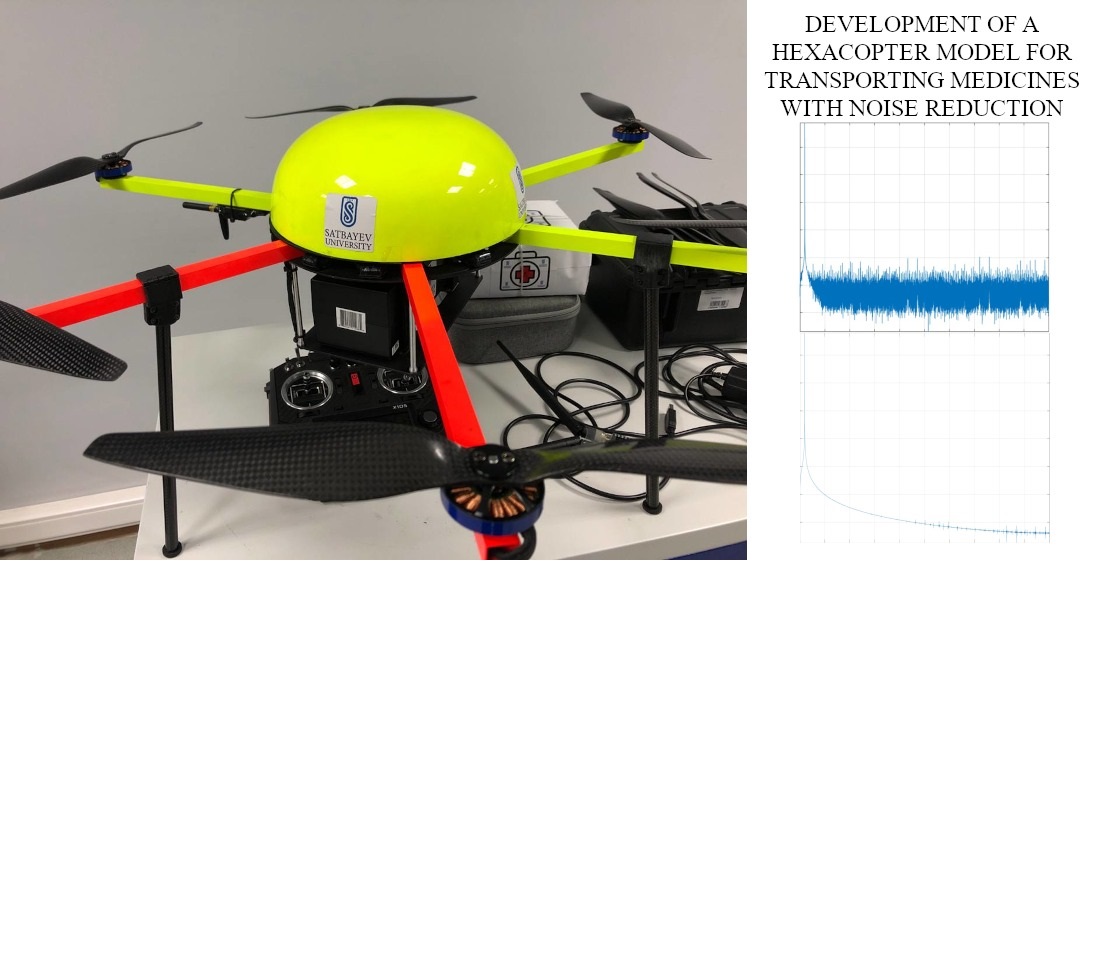
This article provides a prototype of the hexacopter design for small carriage delivery, used for medicinal transportation. During the test usage of the prototype UAV, such problems as shaking and unstable fixation of the lock mechanism holding the delivered cargo are observed and noted. The article underlines the cause of said problems as electromagnetic compatibility considerations, the methodology of debugging was to measure signals with oscilloscope and servotest, and provides the solution as application of Kalman filter for antennas. The results of the oscilloscope and spectrum analyzer during the debugging process before and after optimization by Kalman filter usage for noise filtering are shown. Signal noise can cause malfunctions of components, during signal decoding. The UAV prototype showed delayed response during test flight for approximately 0.2 s, which can be critical for flight and delivery precision. Telemetry, navigation, control, data, power supply, engine design, and software considerations are given. The results are not yet sufficient for urban usage, where EMI density is much higher, but the current developments make the suburban usage of UAVs for long range transportation
References
- Ackerman, E., Strickland, E. (2018). Medical delivery drones take flight in East Africa. IEEE Spectrum, 55 (1), 34–35. https://doi.org/10.1109/mspec.2018.8241731
- Pandey, S. K., Zaveri, M. A., Choksi, M., Kumar, J. S. (2018). UAV-based Localization for Layered Framework of the Internet of Things. Procedia Computer Science, 143, 728–735. https://doi.org/10.1016/j.procs.2018.10.442
- Erdelj, M., Natalizio, E., Chowdhury, K. R., Akyildiz, I. F. (2017). Help from the Sky: Leveraging UAVs for Disaster Management. IEEE Pervasive Computing, 16 (1), 24–32. https://doi.org/10.1109/mprv.2017.11
- Simmons, D. (2016). Rwanda begins Zipline commercial drone deliveries. Available at: https://www.bbc.com/news/technology-37646474
- TU delft’s ambulance drone drastically increases chances of survival of cardiac arrest patients (2014). Available at: http://www.odbornecasopisy.cz/en/post/tu-delft-s-ambulance-drone-drastically-increases-chances-of-survival-of-cardiac-arrest-patients--842
- Qin, Z., Tang, X., Meng, Z., Wu, Y.-T., Lyu, S.-K., Wang, Y. (2023). Conceptual design for a multi-rotor UAV based on variable paddle pitch. Journal of Mechanical Science and Technology, 37 (10), 5349–5361. https://doi.org/10.1007/s12206-023-0936-1
- Moormann, D. (2015). DHL parcelcopter research flight campaign 2014 for emergency delivery of medication. ICAO RPAS Symposium. Montreal. Available at: https://www.icao.int/Meetings/RPAS/RPASSymposiumPresentation/Day%202%20Workshop%205%20Technology%20Dieter%20Moormann.pdf
- Coxworth, B. (2011). Quadshot RC aircraft combines quadricopter hovering with airplane flight. Available at: https://newatlas.com/quadshot-hovers-and-flies/19449/
- Saeed, A. S., Younes, A. B., Cai, C., Cai, G. (2018). A survey of hybrid Unmanned Aerial Vehicles. Progress in Aerospace Sciences, 98, 91–105. https://doi.org/10.1016/j.paerosci.2018.03.007
- Gu, H., Lyu, X., Li, Z., Shen, S., Zhang, F. (2017). Development and experimental verification of a hybrid vertical take-off and landing (VTOL) unmanned aerial vehicle(UAV). 2017 International Conference on Unmanned Aircraft Systems (ICUAS), 160–169. https://doi.org/10.1109/icuas.2017.7991420
- Hochstenbach, M., Notteboom, C., Theys, B., De Schutter, J. (2015). Design and Control of an Unmanned Aerial Vehicle for Autonomous Parcel Delivery with Transition from Vertical Take-off to Forward Flight – VertiKUL, a Quadcopter Tailsitter. International Journal of Micro Air Vehicles, 7 (4), 395–405. https://doi.org/10.1260/1756-8293.7.4.395
- Six places where drones are delivering medicines (2022). Nature. Available at: https://www.nature.com/articles/d41591-022-00053-9
- Drones Could Soon Deliver Medications to Your Home. Verywell Health. Available at: https://www.verywellhealth.com/drones-medications-delivery-5219050
- How are Drones Used in Healthcare? News-Medical.net. Available at: https://www.news-medical.net/health/How-are-drones-used-in-healthcare.aspx
- Drone-Enabled Pharmaceutical Delivery: Navigating Regulatory Turbulence. Available at: https://blog.petrieflom.law.harvard.edu/2021/04/15/drone-enabled-pharmaceutical-delivery/
- How drones could change the future of healthcare delivery (2020). World Economic Forum. Available at: https://www.weforum.org/agenda/2020/05/medical-drone-delivery-india-africa-modernize-last-mile/
- Mazzeo, F., de Angelis, E. L., Giulietti, F., Talamelli, A., Leali, F. (2024). Performance Analysis and Conceptual Design of Lightweight UAV for Urban Air Mobility. Drones, 8 (9), 507. https://doi.org/10.3390/drones8090507
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2024 Abdumezhit Darayev, Muhabbat Khizirova, Anatoly Samsonenko, Serikbek Ibekeyev, Daulet Ilyas

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.






