Reconstructing missing global positioning data with zero-shot large language models
DOI:
https://doi.org/10.15587/1729-4061.2025.335592Keywords:
large language models, missing values, neural networks, imputation, prompt tuningAbstract
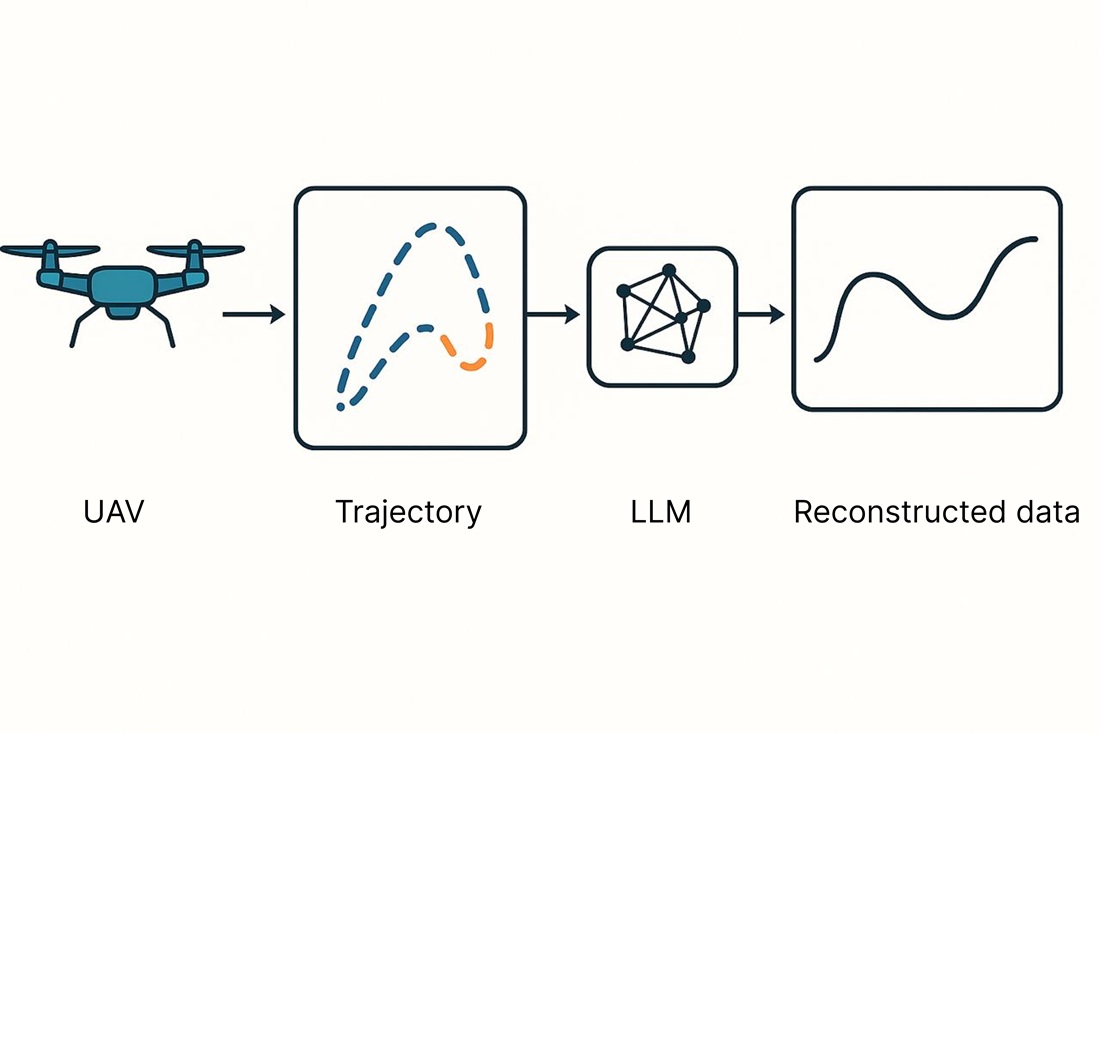
This study focuses on the reconstruction of missing GPS trajectory data. The principal issue relates to restoring geospatial coordinates in the absence of large volumes of labeled data and under conditions where conventional spatial-temporal models demonstrate limited generalization capabilities.
This paper proposes a large language model-based approach to address the reconstruction task without requiring prior training on specialized datasets. To reduce dependence on domain-specific features, the focus was on optimizing data preprocessing and constructing effective prompts. Three coordinate representations have been explored: original degree-based values (using the VPAIR dataset), the Earth-Centered, Earth-Fixed (ECEF) system, and ECEF coordinates shifted relative to the starting point of the trajectory.
Experimental results show that using centered ECEF coordinates reduces the mean absolute error (MAE) by 51–59% for both latitude and longitude compared to other representations. Conversion to the ECEF system also demonstrates selective advantages in latitude reconstruction. To mitigate the instability of autoregressive prediction, a multi-iteration reconstruction strategy with result aggregation has been implemented. The open-source model LLaMA 3.2 achieved the highest accuracy (MAE: 36.57 for latitude and 52.14 for longitude), outperforming both other open models and the commercial GPT-4o.
The proposed approach can be considered a viable post-processing tool, particularly in missions involving unmanned aerial vehicles or other mobile platforms where part of the GPS data has been lost during acquisition
References
- Chang, Y., Cheng, Y., Manzoor, U., Murray, J. (2023). A review of UAV autonomous navigation in GPS-denied environments. Robotics and Autonomous Systems, 170, 104533. https://doi.org/10.1016/j.robot.2023.104533
- Khan, S. Z., Mohsin, M., Iqbal, W. (2021). On GPS spoofing of aerial platforms: a review of threats, challenges, methodologies, and future research directions. PeerJ Computer Science, 7, e507. https://doi.org/10.7717/peerj-cs.507
- Gao, Q., Molloy, J., Axhausen, K. W. (2021). Trip Purpose Imputation Using GPS Trajectories with Machine Learning. ISPRS International Journal of Geo-Information, 10 (11), 775. https://doi.org/10.3390/ijgi10110775
- Zhang, S., Gong, L., Zeng, Q., Li, W., Xiao, F., Lei, J. (2021). Imputation of GPS Coordinate Time Series Using missForest. Remote Sensing, 13 (12), 2312. https://doi.org/10.3390/rs13122312
- Liu, H., Li, L. (2022). Missing Data Imputation in GNSS Monitoring Time Series Using Temporal and Spatial Hankel Matrix Factorization. Remote Sensing, 14 (6), 1500. https://doi.org/10.3390/rs14061500
- Floridi, L., Chiriatti, M. (2020). GPT-3: Its Nature, Scope, Limits, and Consequences. Minds and Machines, 30 (4), 681–694. https://doi.org/10.1007/s11023-020-09548-1
- Achiam, J., Adler, S., Agarwal, S., Ahmad, L., Akkaya, I., Aleman, F. L. et al. (2023). GPT 4 Technical Report. arXiv. https://doi.org/10.48550/arXiv.2303.08774
- Touvron, H., Lavril, T., Izacard, G., Martinet, X., Lachaux, M.‑A., Lacroix, T. et al. (2023). LLaMA: Open and Efficient Foundation Language Models. arXiv. https://doi.org/10.48550/arXiv.2302.13971
- Touvron, H., Martin, L., Stone, K., Albert, P., Almahairi, A., Babaei, Y. et al. (2023). LlaMA 2: Open foundation and fine‑tuned chat models. arXiv. https://doi.org/10.48550/arXiv.2307.09288
- Grattafiori, A., Dubey, A., Jauhri, A., Pandey, A., Kadian, A., Al‑Dahle, A. et al. (2024). The Llama 3 herd of models. arXiv. https://doi.org/10.48550/arXiv.2407.21783
- Riviere, M., Pathak, S., Sessa, P. G., Hardin, C., Bhupatiraju, S., Hussenot, L. et al. (2024). Gemma 2: Improving open language models at a practical size. arXiv. https://doi.org/10.48550/arXiv.2408.00118
- Gruver, N., Finzi, M., Qiu, S., Wilson, A. G. (2023). Large language models are zero‑shot time series forecasters. NeurIPS 36, 19622–19635. https://doi.org/10.48550/arXiv.2310.07820
- Gu, Y., Han, X., Liu, Z., Huang, M. (2022). PPT: Pre-trained Prompt Tuning for Few-shot Learning. Proceedings of the 60th Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers). Dublin: Association for Computational Linguistics, 8410–8423. https://doi.org/10.18653/v1/2022.acl-long.576
- Tsmots, I., Teslyuk, V., Opotyak, Y., Rabyk, V. (2023). Intelligent motion control system for the mobile robotic platform. 7th International Conference on Computational Linguistics and Intelligent Systems. Kharkiv: CEUR Workshop Proceedings. Available at: https://ceur-ws.org/Vol-3403/paper42.pdf
- Wang, Y., Feng, Z., Zhang, H., Gao, Y., Lei, J., Sun, L. et al. (2024). Angle Robustness Unmanned Aerial Vehicle Navigation in GNSS-Denied Scenarios. Proceedings of the AAAI Conference on Artificial Intelligence, 38 (9), 10386–10394. https://doi.org/10.1609/aaai.v38i9.28906
- Junninen, H., Niska, H., Tuppurainen, K., Ruuskanen, J., Kolehmainen, M. (2004). Methods for imputation of missing values in air quality data sets. Atmospheric Environment, 38 (18), 2895–2907. https://doi.org/10.1016/j.atmosenv.2004.02.026
- van Buuren, S., Groothuis-Oudshoorn, K. (2011). mice: Multivariate Imputation by Chained Equations in R. Journal of Statistical Software, 45 (3), 1–67. https://doi.org/10.18637/jss.v045.i03
- Oliver, M. A., Webster, R. (2014). A tutorial guide to geostatistics: Computing and modelling variograms and kriging. CATENA, 113, 56–69. https://doi.org/10.1016/j.catena.2013.09.006
- Murti, D. M. P., Pujianto, U., Wibawa, A. P., Akbar, M. I. (2019). K-Nearest Neighbor (K-NN) based Missing Data Imputation. 2019 5th International Conference on Science in Information Technology. Yogyakarta: IEEE, 83–88. https://doi.org/10.1109/icsitech46713.2019.8987530
- Che, Z., Purushotham, S., Cho, K., Sontag, D., Liu, Y. (2018). Recurrent Neural Networks for Multivariate Time Series with Missing Values. Scientific Reports, 8 (1). https://doi.org/10.1038/s41598-018-24271-9
- Asadi, R., Regan, A. C. (2019). A convolution recurrent autoencoder for spatio‑temporal missing data imputation. arXiv. https://doi.org/10.48550/arXiv.1904.12413
- Nag, P., Sun, Y., Reich, B. J. (2023). Spatio-temporal DeepKriging for interpolation and probabilistic forecasting. Spatial Statistics, 57, 100773. https://doi.org/10.1016/j.spasta.2023.100773
- You, J., Ma, X., Ding, D. Y., Kochenderfer, M., Leskovec, J. (2020). Handling missing data with graph representation learning. NIPS'20, 19075–19087. https://doi.org/10.48550/arXiv.2010.16418
- Chorowski, J., Bahdanau, D., Serdyuk, D., Cho, K., Bengio, Y. (2015). Attention‑based models for speech recognition. NIPS'15, 577–585. https://doi.org/10.48550/arXiv.1506.07503
- Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones, L., Gómez, A. N. et al. (2017). Attention is all you need. NIPS'17, 6000–6010. https://doi.org/10.48550/arXiv.1706.03762
- Schleiss, M., Rouatbi, F., Cremers, D. (2022). VPAIR – Aerial visual place recognition and localization in large‐scale outdoor environments. arXiv. https://doi.org/10.48550/arXiv.2205.11567
- Enge, P. K. (1994). The Global Positioning System: Signals, measurements, and performance. International Journal of Wireless Information Networks, 1 (2), 83–105. https://doi.org/10.1007/bf02106512
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Roman Ilechko, Orest Borovyi, Kyrylo Yemets, Yurii Tsymbal

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.






