Design of a tumbling machine (mixer) using a statically determinate spatial mechanism and determination of rational geometric parameters
DOI:
https://doi.org/10.15587/1729-4061.2026.352115Keywords:
articulated spatial mechanism, kinematic pair, degree of freedom, mixing of bulk materialsAbstract
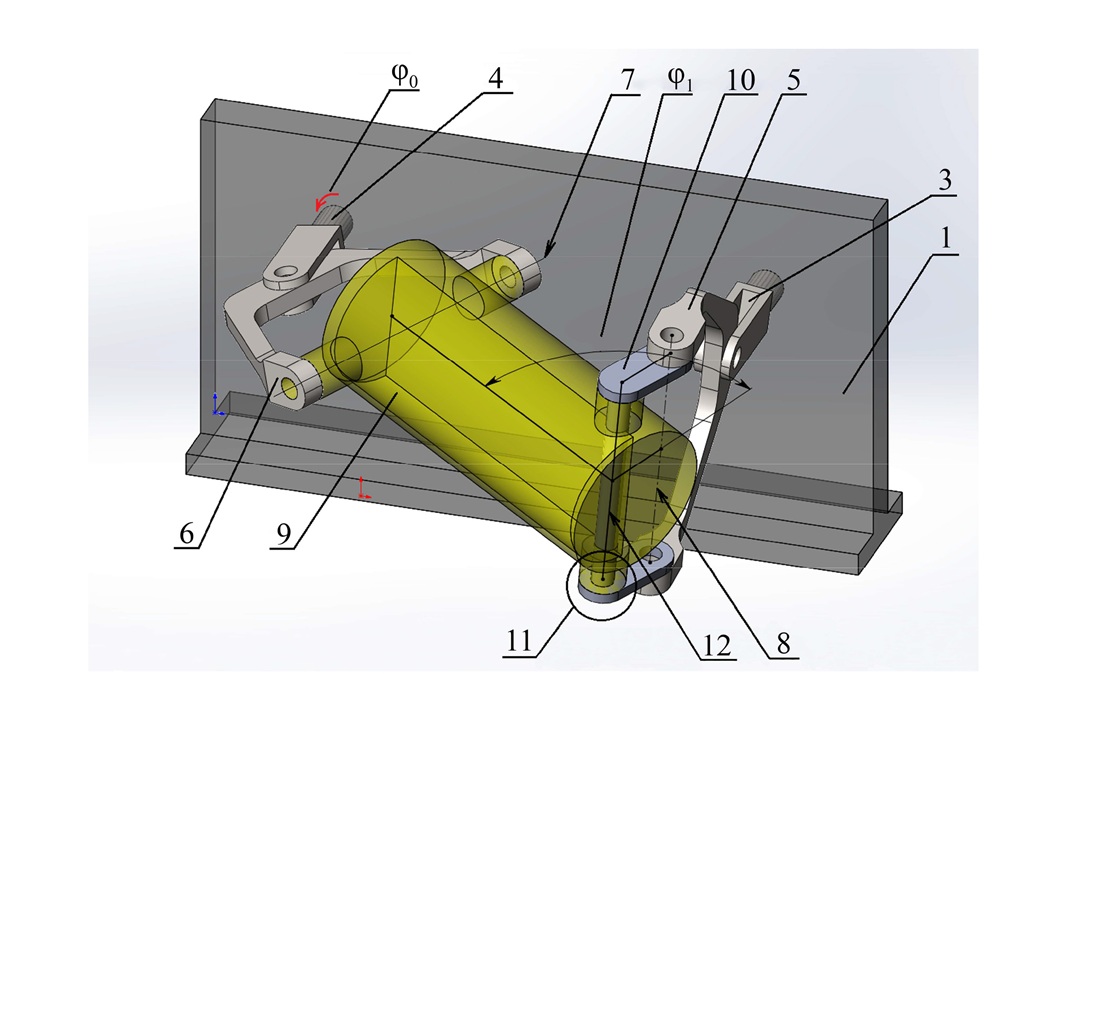
The object of this study is tumbling equipment in which working containers execute a complex spatial motion.
Articulated spatial mechanisms are widely used in various branches of industry, particularly in mechanical engineering, including mechanisms that contain passive constraints in their structure. The presence of passive constraints can cause operational problems and negatively affect equipment reliability. Therefore, an important task is the synthesis of articulated spatial mechanisms through modification of existing structures in order to eliminate passive constraints.
This paper reports the synthesis of a statically determined seven-link articulated spatial mechanism with revolute kinematic pairs. A technique for eliminating a passive constraint in the structure of an articulated spatial mechanism has been proposed, which allows for its static determinacy. As a result, the need to compensate for inaccuracies in geometric relationships between the links by means of clearances in the kinematic pairs is eliminated, making it possible to improve operational characteristics and prolong service life.
The introduction of an auxiliary link into the spatial kinematic chain creates conditions for effective implementation of tumbling technological operations by increasing the amplitude of spatial displacement of the container.
Analytical relationships between the main geometric parameters of the seven-link spatial mechanism that determine its operability have been established. The derived mathematical dependences allow a justified selection of rational geometric parameters at the design stage and provide a basis for calculating key geometric characteristics for further engineering application in industrial practice.
References
- Marigo, M., Cairns, D. L., Davies, M., Ingram, A., Stitt, E. H. (2012). A numerical comparison of mixing efficiencies of solids in a cylindrical vessel subject to a range of motions. Powder Technology, 217, 540–547. https://doi.org/10.1016/j.powtec.2011.11.016
- Jadhav, P. S., Jadhav, B. R. (2013). A study on mixing of composite solids in the three dimensional turbula mixer. International Journal of Advanced Engineering Research and Studies, 2 (3). Available at: https://www.academia.edu/30694299/A_STUDY_ON_MIXING_OF_COMPOSITE_SOLIDS_IN_THE_THREE_DIMENSIONAL_TURBULA_MIXER_Address_for_Correspondence
- Murithi, M., Keraita, J. N., Obiko, J. O., Mwema, F. M., Wambua, J. M., Jen, T.-C. (2022). Optimisation of the swinging jaw design for a single toggle jaw crusher using finite element analysis. International Journal on Interactive Design and Manufacturing (IJIDeM), 18 (9), 6351–6358. https://doi.org/10.1007/s12008-022-01044-3
- Antonyuk, E. Ya., Sakharnov, V. A., Koval’, N. I. (2011). Dynamic system of an engine with spatially rocking links: a mathematical model. International Applied Mechanics, 46 (9), 1039–1049. https://doi.org/10.1007/s10778-011-0396-7
- Han, B., Zhou, Y., Han, M., Hu, X., Xu, Y., Yao, J. (2025). Kinematics and dynamics characteristics of a double-ring truss deployable antenna mechanism based on triangular prism deployable unit. Thin-Walled Structures, 206, 112608. https://doi.org/10.1016/j.tws.2024.112608
- Zalyubovskii, M., Panasyuk, I., Koshel, S., Koshel, O., Akimova, L. (2024). Synthesis and research of the spatial eight-link mechanism of the barreling machine. Naukovyi Visnyk Natsionalnoho Hirnychoho Universytetu, 3, 42–49. https://doi.org/10.33271/nvngu/2024-3/042
- Zalyubovskyi, M. G., Panasyuk, I. V., Koshel’, S. O., Lychov, D. O. (2022). Design Parameters of the Four-Link Hinged Mechanism of Barreling Machine Drive. International Applied Mechanics, 58 (6), 725–731. https://doi.org/10.1007/s10778-023-01196-z
- Zalyubovskii, M. G., Panasyuk, I. V. (2020). Studying the Main Design Parameters of Linkage Mechanisms of Part-Processing Machines with Two Working Barrels. International Applied Mechanics, 56 (6), 762–772. https://doi.org/10.1007/s10778-021-01053-x
- Antonyuk, E. Ya., Zabuga, A. T. (2016). Motion of an Articulated Vehicle with Two-Dimensional Sections Subject to Lateral Obstacles. International Applied Mechanics, 52 (4), 404–412. https://doi.org/10.1007/s10778-016-0765-3
- Deepak, B. B. V. L., Bahubalendruni, M. V. A. R. (2017). Numerical analysis for force distribution along the swing jaw plate of a single toggle jaw crusher. World Journal of Engineering, 14 (3), 255–260. https://doi.org/10.1108/wje-07-2016-0025
- Mochner, M., Schatz, P. (2016). Technik und Verwandlung: Der Weg zu einer menschen- und naturgemäßen Technik. Verlag am Goetheanum, 456.
- Bhoite, K., Kakandikar, G. M., Nandedkar, V. M. (2015). Schatz Mechanism with 3D-Motion Mixer-A Review. Materials Today: Proceedings, 2 (4-5), 1700–1706. https://doi.org/10.1016/j.matpr.2015.07.003
- Gundale, V. (2015). Kinematics of an overconstrained mechanism in practice. International Journal of Advanced Research in Engineering and Applied Sciences, 4 (12), 9–15. Available at: https://www.academia.edu/87428870/Kinematics_of_an_overconstrained_mechanism_in_practice?utm_source=chatgpt.com
- McCarthy, J. M., Soh, G. S. (2011). Geometric Design of Linkages. In Interdisciplinary Applied Mathematics. Springer New York. https://doi.org/10.1007/978-1-4419-7892-9
- Shih, A. J., Yan, H.-S. (2002). Synthesis of a single-loop, overconstrained six revolute joint spatial mechanism for two-position cylindrical rigid body guidance. Mechanism and Machine Theory, 37 (1), 61–73. https://doi.org/10.1016/s0094-114x(01)00055-6
- Zaliubovskyi, M. G., Panasiuk, I. V., Smirnov, Yu. I., Malyshev, V. V. (2020). Synthesis and research of the tumbling machine spatial mechanism. Naukovyi Visnyk Natsionalnoho Hirnychoho Universytetu, 4, 69–75. https://doi.org/10.33271/nvngu/2020-4/069
- Zalyubovs’kyi, M. G., Panasyuk, I. V., Koshel’, S. O., Koshel’, G. V. (2021). Synthesis and Analysis of Redundant-Free Seven-Link Spatial Mechanisms of Part Processing Machine. International Applied Mechanics, 57 (4), 466–476. https://doi.org/10.1007/s10778-021-01098-y
- Marigo, M., Cairns, D. L., Davies, M., Cook, M., Ingram, A., Stitt, E. H. (2010). Developing Mechanistic Understanding of Granular Behaviour in Complex Moving Geometry using the Discrete Element Method. Part A: Measurement and Reconstruction of Turbula® Mixer Motion using Positron Emission Particle Tracking. ech Science Press, 59 (3), 217–238. Available at: https://www.techscience.com/CMES/v59n3/25502/pdf
- Marigo, M., Cairns, D. L., Davies, M., Ingram, A., Stitt, E. H. (2011). Developing mechanistic understanding of granular behaviour in complex moving geometry using the Discrete Element Method. Powder Technology, 212 (1), 17–24. https://doi.org/10.1016/j.powtec.2011.04.009
- Zalyubovskii, M. G., Panasyuk, I. V., Koshel’, S. O., Koshel’, G. V. (2022). Modeling and Designing the Barreling Machine Drive with Complex Spatial Motion of the Container. International Applied Mechanics, 58 (4), 472–480. https://doi.org/10.1007/s10778-022-01172-z
- Marigo, M., Davies, M., Leadbeater, T., Cairns, D. L., Ingram, A., Stitt, E. H. (2013). Application of Positron Emission Particle Tracking (PEPT) to validate a Discrete Element Method (DEM) model of granular flow and mixing in the Turbula mixer. International Journal of Pharmaceutics, 446 (1-2), 46–58. https://doi.org/10.1016/j.ijpharm.2013.01.030
- Abdreshova, S., Zhauyt, A., Alipbayev, K., Kosbolov, S., Aden, A., Orazaliyeva, A. (2025). Synthesis of Four-Link Initial Kinematic Chains with Spherical Pairs for Spatial Mechanisms. Applied Sciences, 15 (7), 3602. https://doi.org/10.3390/app15073602
- Vo, D. T., Kheylo, S., Nguyen, V. Q. (2022). Kinematic and dynamic accuracy of spherical mechanisms. Mechanical Sciences, 13 (1), 23–30. https://doi.org/10.5194/ms-13-23-2022
- Uicker, J. J., Pennock, G. R., Shigley, J. E. (2011). Theory of Machines and Mechanisms. Oxford University Press, 950. Available at: https://ftp.idu.ac.id/wp-content/uploads/ebook/tdg/DESIGN%20SISTEM%20DAYA%20GERAK/Theory%20of%20Machines%20and%20Mechanisms%20(%20PDFDrive%20).pdf
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Mark Zalyubovskyi, Oleksii Volianyk, Mykola Rubanka, Sergey Koshel, Hanna Koshel, Serhiy Popovichenko

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.






