Determining the number of small-sized radars in a network with coherent signal processing for the detection of stealth aerial vehicles
DOI:
https://doi.org/10.15587/1729-4061.2024.306520Keywords:
small-sized radar, aerial object detection, number of network elements, conditional probability of correct detectionAbstract
The object of this study is the process of determining the number of small-sized radars in the network when detecting stealth unmanned aerial vehicles. The main hypothesis of the study assumed that determining the optimal number of small-sized radars in the network will make it possible not to waste unnecessary resources of radars to detect stealth unmanned aerial vehicles.
The main stages of detection of a stealth unmanned aerial vehicle by a network of small-sized radars are:
– reception of the signal reflected from a stealth unmanned aerial vehicle by all small-sized radars of the network;
– coordinated filtering of incoming signals in each small-sized radar;
– compensation of phase shifts in each matched filter;
– coherent addition of output signals from each matched filter at the output of the receivers of each of the N small-sized radars performing reception;
– formation of a complex bypass at the output of the corresponding Doppler channel in each small-sized radar of the network;
– coherent processing of signals from all elements of the network of small-sized radars;
– detection of the output signal from the adder of coherent signals. At the same time, compensation for the random initial phase of signals reflected from a stealth unmanned aerial vehicle is also performed.
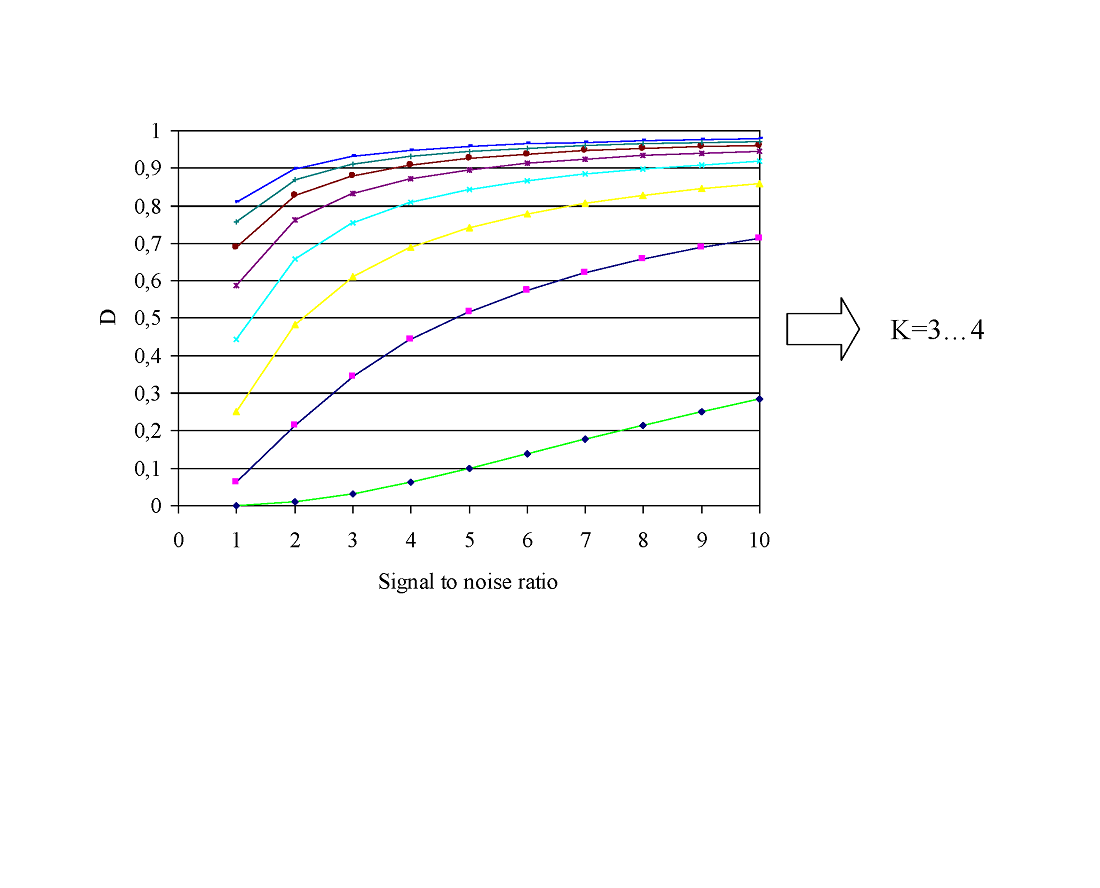
It has been established that the increase in the elements of the network of small-sized radars increases the value of the conditional probability of correct detection. Such an increase is more significant when the number of elements in the network of small-sized radars is increased to two or three. The gain in the signal/noise ratio when adding elements to the network of small-sized radars was evaluated. It was established that the optimal number of small-sized radars in a network with coherent signal processing when detecting stealth unmanned aerial vehicles is 2‒3 radars
References
- Coluccia, A., Parisi, G., Fascista, A. (2020). Detection and Classification of Multirotor Drones in Radar Sensor Networks: A Review. Sensors, 20 (15), 4172. https://doi.org/10.3390/s20154172
- Yu, J., Liu, Y., Bai, Y., Liu, F. (2020). A double-threshold target detection method in detecting low slow small target. Procedia Computer Science, 174, 616–624. https://doi.org/10.1016/j.procs.2020.06.133
- Sentinel Radar. Available at: https://www.rtx.com/raytheon/what-we-do/land/sentinel-radar
- NASAMS anti-aircraft missile system. Available at: https://en.missilery.info/missile/nasams
- US Sentinel Radar Was Recorded in Ukraine. Available at: https://en.defence-ua.com/weapon_and_tech/us_sentinel_radar_was_recorded_in_ukraine-3357.html
- Bezouwen, J., Brandfass, M. (2017). Technology Trends for Future Radar. Available at: http://www.microwavejournal.com/articles/29367-technology-trends-for-future-radar
- Richards, M. A., Scheer, J. A., Holm, W. A. (Eds.) (2010). Principles of Modern Radar: Basic principles. Institution of Engineering and Technology. https://doi.org/10.1049/sbra021e
- Chernyak, V. (2014). Signal detection with MIMO radars. Uspehi sovremennoj radiojelectroniki, 7, 35–48.
- Lishchenko, V., Kalimulin, T., Khizhnyak, I., Khudov, H. (2018). The Method of the organization Coordinated Work for Air Surveillance in MIMO Radar. 2018 International Conference on Information and Telecommunication Technologies and Radio Electronics (UkrMiCo). https://doi.org/10.1109/ukrmico43733.2018.9047560
- Khudov, H. (2020). The Coherent Signals Processing Method in the Multiradar System of the Same Type Two-coordinate Surveillance Radars with Mechanical Azimuthal Rotation. International Journal of Emerging Trends in Engineering Research, 8 (6), 2624–2630. https://doi.org/10.30534/ijeter/2020/66862020
- Multilateration (MLAT) Concept of Use. Edition 1.0 (2007). ICAO Asia and Pacific Office. Available at: https://www.icao.int/APAC/Documents/edocs/mlat_concept.pdf
- LORAN-C. Available at: https://skybrary.aero/articles/loran-c
- Rojhani, N., Shaker, G. (2024). Comprehensive Review: Effectiveness of MIMO and Beamforming Technologies in Detecting Low RCS UAVs. Remote Sensing, 16 (6), 1016. https://doi.org/10.3390/rs16061016
- Kalkan, Y. (2024). 20 Years of MIMO Radar. IEEE Aerospace and Electronic Systems Magazine, 39 (3), 28–35. https://doi.org/10.1109/maes.2023.3349228
- Neven, W. H., Quilter, T. J., Weedon, R., Hogendoorn, R. A. (2005). Wide Area Multilateration Wide Area Multilateration. Report on EATMP TRS 131/04 Version 1.1. National Aerospace Laboratory NLR. Available at: https://www.eurocontrol.int/sites/default/files/2019-05/surveilllance-report-wide-area-multilateration-200508.pdf
- Mantilla-Gaviria, I. A., Leonardi, M., Balbastre-Tejedor, J. V., de los Reyes, E. (2013). On the application of singular value decomposition and Tikhonov regularization to ill-posed problems in hyperbolic passive location. Mathematical and Computer Modelling, 57 (7-8), 1999–2008. https://doi.org/10.1016/j.mcm.2012.03.004
- Schau, H., Robinson, A. (1987). Passive source localization employing intersecting spherical surfaces from time-of-arrival differences. IEEE Transactions on Acoustics, Speech, and Signal Processing, 35 (8), 1223–1225. https://doi.org/10.1109/tassp.1987.1165266
- Ryu, H., Wee, I., Kim, T., Shim, D. H. (2020). Heterogeneous sensor fusion based omnidirectional object detection. 2020 20th International Conference on Control, Automation and Systems (ICCAS). https://doi.org/10.23919/iccas50221.2020.9268431
- Salman, S., Mir, J., Farooq, M. T., Malik, A. N., Haleemdeen, R. (2021). Machine Learning Inspired Efficient Audio Drone Detection using Acoustic Features. 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST). https://doi.org/10.1109/ibcast51254.2021.9393232
- Wang, W. (2016). Overview of frequency diverse array in radar and navigation applications. IET Radar, Sonar & Navigation, 10 (6), 1001–1012. https://doi.org/10.1049/iet-rsn.2015.0464
- Li, Y. (2021). MIMO Radar Waveform Design: An Overview. Journal of Beijing Institute of Technology, 30 (1), 44–59. https://doi.org/10.15918/j.jbit1004-0579.2021.002
- Oleksenko, O., Khudov, H., Petrenko, K., Horobets, Y., Kolianda, V., Kuchuk, N. et al. (2021). The Development of the Method of Radar Observation System Construction of the Airspace on the Basis of Genetic Algorithm. International Journal of Emerging Technology and Advanced Engineering, 11 (8), 23–30. https://doi.org/10.46338/ijetae0821_04
- Khudov, H., Berezhnyi, A., Yarosh, S., Oleksenko, O., Khomik, M., Yuzova, I. et al. (2023). Improving a method for detecting and measuring coordinates of a stealth aerial vehicle by a network of two small-sized radars. Eastern-European Journal of Enterprise Technologies, 6 (9 (126)), 6–13. https://doi.org/10.15587/1729-4061.2023.293276
- Khudov, H., Yarosh, S., Kostyria, O., Oleksenko, O., Khomik, M., Zvonko, A. et al. (2024). Improving a method for non-coherent processing of signals by a network of two small-sized radars for detecting a stealth unmanned aerial vehicle. Eastern-European Journal of Enterprise Technologies, 1 (9 (127)), 6–13. https://doi.org/10.15587/1729-4061.2024.298598
- Chang, L. ZALA Lancet. Loitering munition. Available at: https://www.militarytoday.com/aircraft/lancet.htm
- Shin, S. ‐J. (2017). Radar measurement accuracy associated with target RCS fluctuation. Electronics Letters, 53 (11), 750–752. https://doi.org/10.1049/el.2017.0901
- Kishk, A., A., Chen, X. (Eds.) (2023). MIMO Communications - Fundamental Theory, Propagation Channels, and Antenna Systems. IntechOpen. https://doi.org/10.5772/intechopen.110927
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2024 Hennadii Khudov, Oleksandr Makoveichuk, Ihor Butko, Mykhajlo Murzin, Andrii Zvonko, Anatolii Adamenko, Dmytro Bashynskyi, Oleh Salnyk, Andrii Nyshchuk, Vladyslav Khudov

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.





