Segmentation of image from a first-person-view unmanned aerial vehicle based on a simple ant algorithm
DOI:
https://doi.org/10.15587/1729-4061.2024.310372Keywords:
UAV FPV, segmentation, ant movement, pheromone, route attractiveness, objective functionAbstract
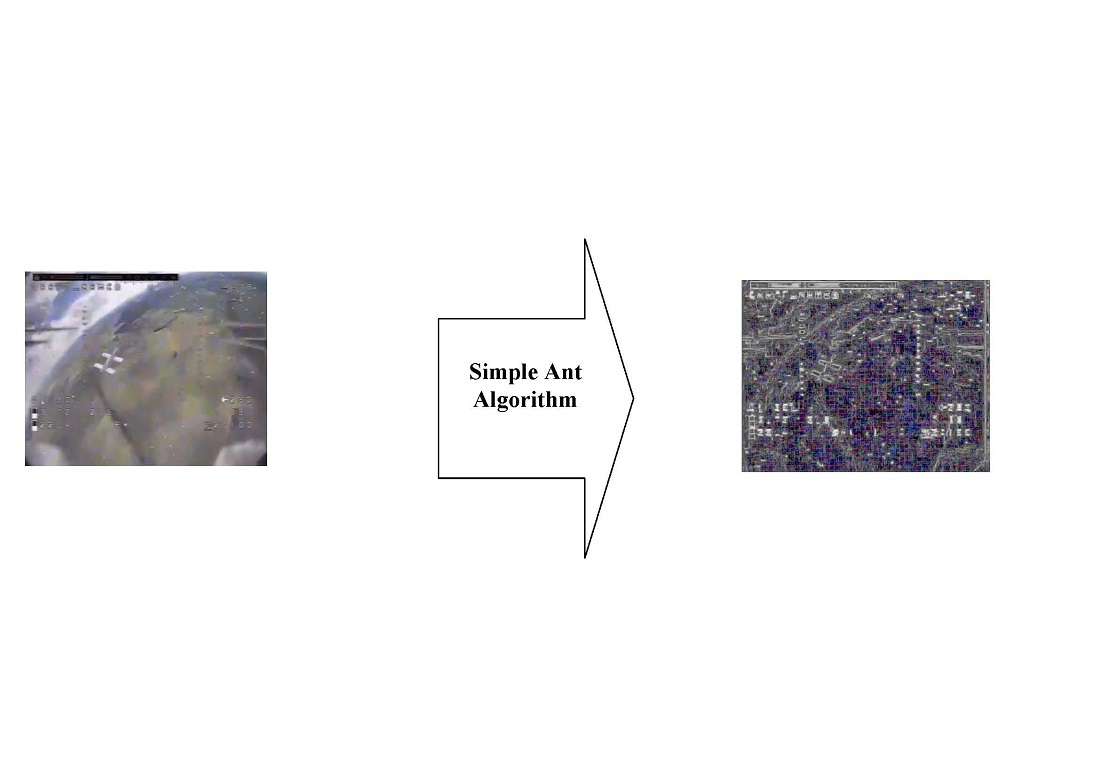
The object of this study is the process of image segmentation from the First Person View (FPV) of an unmanned aerial vehicle (UAV). The main hypothesis of the study assumes that the use of a simple ant algorithm could ensure the necessary quality of the segmented image.
The segmentation method, unlike the known ones, takes into account the number of ants in the image, weight, initial amount and evaporation rate of the pheromone, the "greediness" of the algorithm and provides:
– preliminary selection of individual channels of the Red-Green-Blue (RGB) color space;
– preliminary placement of ants according to the uniform law;
– determining the routes of ants;
– taking into account the attractiveness of the route for each ant;
– change (adjustment) in the concentration of ant pheromones;
– calculation of the probability of movement (transition) of the ant on the movement route;
– determination of the objective function at the j-th iteration and its minimization;
– determining the coordinates of the route of movement (movement) of ants;
– verification of the fulfillment of the stop condition;
– determination of the best routes found by ants;
– calculation of the brightness of the pixels of the segmented image in each channel of the RGB color space;
– further combining the results of channel segmentation.
An experimental study of image segmentation from UAV FPV based on a simple ant algorithm was conducted. The specified object of interest on the segmented image has a certain structure, unevenness of the contours, and can be further used for decoding, categorization, etc. Unlike the object of interest, the background ("garbage" objects) in the segmented image do not have a stable structure and can be further filtered out.
It has been established that the segmented image by the known method based on the gradient module has a low contrast value, there are gaps in the segmented pixels of the object of interest. A segmented image using a method based on a simple ant algorithm is free from that drawback.
References
- First-person view (FPV) drones. Available at: https://www.peoplesproject.com/en/first-person-view-drones/
- Hashimov, E., Sabziev, E., Huseynov, B., Huseynov, M. (2023). Mathematical aspects of determining the motion parameters of a target by UAV. Advanced Information Systems, 7 (1), 18–22. https://doi.org/10.20998/2522-9052.2023.1.03
- Barabash, O., Kyrianov, A. (2023). Development of control laws of unmanned aerial vehicles for performing group flight at the straight-line horizontal flight stage. Advanced Information Systems, 7 (4), 13–20. https://doi.org/10.20998/2522-9052.2023.4.02
- Kaufmann, E., Bauersfeld, L., Loquercio, A., Müller, M., Koltun, V., Scaramuzza, D. (2023). Champion-level drone racing using deep reinforcement learning. Nature, 620 (7976), 982–987. https://doi.org/10.1038/s41586-023-06419-4
- Military Imaging and Surveillance Technology (MIST) (Archived). Available at: https://www.darpa.mil/program/military-imaging-and-surveillance-technology
- LLano, E. G., Roig, D. O., Cabrera, Y. C. (2018). Unsupervised Segmentation of Agricultural Crops in UAV RGB Images. Revista Cubana de Ciencias Informáticas, 12 (4), 17–28. Available at: https://www.redalyc.org/journal/3783/378365912002/html/
- Zhu, S., Zhao, J., Guo, L. (2014). Rival Penalized Image Segmentation. Journal of Multimedia, 9 (5). https://doi.org/10.4304/jmm.9.5.736-745
- Kinahan, J., Smeaton, A. F. (2021). Image Segmentation to Identify Safe Landing Zones for Unmanned Aerial Vehicles. Proceedings of the 29th Irish Conference on Artificial Intelligence and Cognitive Science AICS'2021. https://doi.org/10.48550/arXiv.2111.14557
- Pap, M., Kiraly, S., Moljak, S. (2019). Investigating the usability of UAV obtained multispectral imagery in tree species segmentation. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XLII-2/W18, 159–165. https://doi.org/10.5194/isprs-archives-xlii-2-w18-159-2019
- Treboux, J., Genoud, D. (2018). Improved Machine Learning Methodology for High Precision Agriculture. 2018 Global Internet of Things Summit (GIoTS). https://doi.org/10.1109/giots.2018.8534558
- Parsons, M., Bratanov, D., Gaston, K. J., Gonzalez, F. (2018). UAVs, Hyperspectral Remote Sensing, and Machine Learning Revolutionizing Reef Monitoring. Sensors, 18 (7), 2026. https://doi.org/10.3390/s18072026
- Lin, Z., Doyog, N. D., Huang, S.-F., Lin, C. (2021). Segmentation and Classification of UAV-based Orthophoto of Watermelon Field Using Support Vector Machine Technique. 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS. https://doi.org/10.1109/igarss47720.2021.9553715
- Miyamoto, H., Momose, A., Iwami, S. (2018). UAV image classification of a riverine landscape by using machine learning techniques. Geophysical Research Abstracts, 20, EGU2018-5919. Available at: https://meetingorganizer.copernicus.org/EGU2018/EGU2018-5919.pdf
- Son, J., Jung, I., Park, K., Han, B. (2015). Tracking-by-Segmentation with Online Gradient Boosting Decision Tree. 2015 IEEE International Conference on Computer Vision (ICCV). https://doi.org/10.1109/iccv.2015.350
- Huang, L., Song, J., Yu, X., Fang, L. (2019). Unmanned Aerial Vehicle Remote Sensing Image Segmentation Method by Combining Superpixels with multi-features Distance Measure. IOP Conference Series: Earth and Environmental Science, 234, 012022. https://doi.org/10.1088/1755-1315/234/1/012022
- Zimudzi, E., Sanders, I., Rollings, N., Omlin, C. (2018). Segmenting mangrove ecosystems drone images using SLIC superpixels. Geocarto International, 34 (14), 1648–1662. https://doi.org/10.1080/10106049.2018.1497093
- Xiang, S., Xu, J., Zhao, J., Li, Y., Zhang, S. (2015). A novel LBP-Mean shift segmentation algorithm for UAV remote sensing images based on LBP textural features and improved Mean shift algorithm. Proceedings of the 3rd International Conference on Mechatronics, Robotics and Automation. https://doi.org/10.2991/icmra-15.2015.79
- Wang, H., Shen, Z., Zhang, Z., Xu, Z., Li, S., Jiao, S., Lei, Y. (2021). Improvement of Region-Merging Image Segmentation Accuracy Using Multiple Merging Criteria. Remote Sensing, 13 (14), 2782. https://doi.org/10.3390/rs13142782
- Shen, X., Teng, Y., Fu, H., Wan, Z., Zhang, X. (2020). Crop identification using UAV image segmentation. Second Target Recognition and Artificial Intelligence Summit Forum. https://doi.org/10.1117/12.2552195
- Bhatnagar, S., Gill, L., Ghosh, B. (2020). Drone Image Segmentation Using Machine and Deep Learning for Mapping Raised Bog Vegetation Communities. Remote Sensing, 12 (16), 2602. https://doi.org/10.3390/rs12162602
- Marcu, A., Licaret, V., Costea, D., Leordeanu, M. (2021). Semantics Through Time: Semi-supervised Segmentation of Aerial Videos with Iterative Label Propagation. Computer Vision – ACCV 2020, 537–552. https://doi.org/10.1007/978-3-030-69525-5_32
- Khudov, H., Makoveichuk, O., Butko, I., Gyrenko, I., Stryhun, V., Bilous, O. et al. (2022). Devising a method for segmenting camouflaged military equipment on images from space surveillance systems using a genetic algorithm. Eastern-European Journal of Enterprise Technologies, 3 (9 (117)), 6–14. https://doi.org/10.15587/1729-4061.2022.259759
- Khudov, H., Makoveichuk, O., Khizhnyak, I., Oleksenko, O., Khazhanets, Y., Solomonenko, Y. et al. (2022). Devising a method for segmenting complex structured images acquired from space observation systems based on the particle swarm algorithm. Eastern-European Journal of Enterprise Technologies, 2 (9 (116)), 6–13. https://doi.org/10.15587/1729-4061.2022.255203
- Khudov, H., Ruban, I., Makoveichuk, O., Pevtsov, H., Khudov, V., Khizhnyak, I. et al. (2020). Development of methods for determining the contours of objects for a complex structured color image based on the ant colony optimization algorithm. EUREKA: Physics and Engineering, 1, 34–47. https://doi.org/10.21303/2461-4262.2020.001108
- Ruban, I., Khudov, H., Makoveichuk, O., Khizhnyak, I., Lukova-Chuiko, N., Pevtsov, H. et al. (2019). Method for determining elements of urban infrastructure objects based on the results from air monitoring. Eastern-European Journal of Enterprise Technologies, 4 (9 (100)), 52–61. https://doi.org/10.15587/1729-4061.2019.174576
- de O. Bastos, L., Liatsis, P., Conci, A. (2008). Automatic texture segmentation based on k-means clustering and efficient calculation of co-occurrence features. 2008 15th International Conference on Systems, Signals and Image Processing. https://doi.org/10.1109/iwssip.2008.4604387
- Hung, C.-C., Song, E., Lan, Y. (2019). Image Texture, Texture Features, and Image Texture Classification and Segmentation. Image Texture Analysis, 3–14. https://doi.org/10.1007/978-3-030-13773-1_1
- Tian, Y., Li, Y., Liu, D., Luo, R. (2016). FCM texture image segmentation method based on the local binary pattern. 2016 12th World Congress on Intelligent Control and Automation (WCICA). https://doi.org/10.1109/wcica.2016.7578571
- Gorokhovatskyi, V., Peredrii, O., Tvoroshenko, I., Markov, T. (2023). Distance matrix for a set of structural description components as a tool for image classifier creating. Advanced Information Systems, 7 (1), 5–13. https://doi.org/10.20998/2522-9052.2023.1.01
- Hurin, A., Khudov, H., Kostyria, O., Maslenko, O., Siadrystyi, S. (2024). Comparative analysis of spectral anomalies detection methods on images from on-board remote sensing systems. Advanced Information Systems, 8 (2), 48–57. https://doi.org/10.20998/2522-9052.2024.2.06
- Khudov, H., Khizhnyak, I., Glukhov, S., Shamrai, N., Pavlii, V. (2024). The method for objects detection on satellite imagery based on the firefly algorithm. Advanced Information Systems, 8 (1), 5–11. https://doi.org/10.20998/2522-9052.2024.1.01
- Mohammed Jabbar, A., Ku-Mahamud, K. R., Sagban, R. (2020). An improved ACS algorithm for data clustering. Indonesian Journal of Electrical Engineering and Computer Science, 17 (3), 1506. https://doi.org/10.11591/ijeecs.v17.i3.pp1506-1515
- Jablonowski, M. (2020). Beyond drone vision: the embodied telepresence of first-person-view drone flight. The Senses and Society, 15 (3), 344–358. https://doi.org/10.1080/17458927.2020.1814571
- Saha, A., Kumar, A., Sahu, A. K. (2017). FPV drone with GPS used for surveillance in remote areas. 2017 Third International Conference on Research in Computational Intelligence and Communication Networks (ICRCICN). https://doi.org/10.1109/icrcicn.2017.8234482
- Siddiqui, W. A. (2024). Design and Fabrication of FPV Racing Drone. Journal of Mechanical and Construction Engineering (JMCE), 4 (1), 1–8. https://doi.org/10.54060/a2zjournals.jmce.38
- Salamh, F. E., Karabiyik, U., Rogers, M. K., Matson, E. T. (2021). A Comparative UAV Forensic Analysis: Static and Live Digital Evidence Traceability Challenges. Drones, 5 (2), 42. https://doi.org/10.3390/drones5020042
- Karp, S. (2023). Introduction to FPV drones. Available at: https://www.thedroningcompany.com/blog/introduction-to-fpv-drones
- Defense industry of Ukraine. Available at: https://mil.in.ua/en/news/
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2024 Hennadii Khudov, Illia Hridasov, Irina Khizhnyak, Iryna Yuzova, Yuriy Solomonenko

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.





