Розробка математичної моделі динаміки автономного мобільного робота змінюваної конфігурації
DOI:
https://doi.org/10.15587/1729-4061.2022.269840Ключові слова:
автономний мобільний робот, маніпулятор, математична модель, динаміка, взаємозв'язок динамічних параметрівАнотація
Стаття присвячена розробці математичної моделі руху автономного мобільного робота (АМР) змінюваної конфігурації з врахуванням взаємозв’язку динамічних параметрів механічної системи.
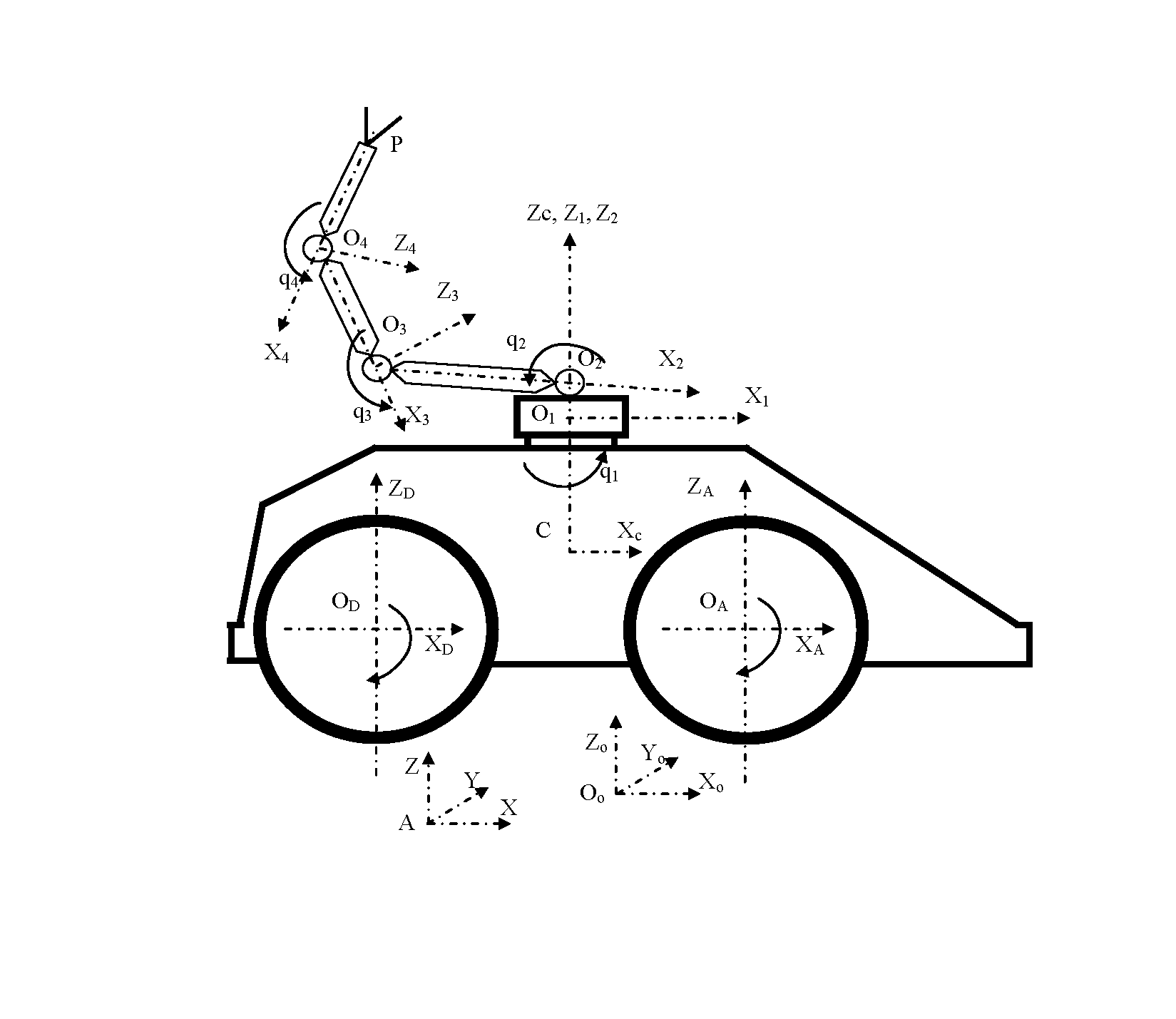
В якості прикладу розглянуто конструкцію АМР з маніпулятором.
Об'єкт дослідження – динаміка АМР з маніпулятором. Особливості динаміки АМР з маніпулятором обумовлені зміною положення центру мас системи при відносному русі маніпулятора та сумірністю недіагональних і діагональних елементів тензору інерції, обчислених відносно осей базової системи координат. Складання математичної моделі здійснено за методом Ньтона-Ейлера. Отримана математична модель містить:
– рівняння руху центру мас системи АМР змінюваної конфігурації вздовж траєкторії в інерціальній системі координат;
– рівняння кутового руху АМР змінюваної конфігурації в інерціальній системі координат;
– рівняння руху маніпулятора відносно АМР.
У загальному випадку центр мас платформи АМР рухається у горизонтальній площині. Встановлення взаємозв’язку динамічних параметрів механічної системи дозволить зберегти функціональність та забезпечити орієнтацію АМР у вертикальних площинах незважаючи на переміщення маніпулятора.
Як об’єкт керування АМР з маніпулятором це багатозв’язна система з перехресним внутрішнім зв’язком каналів керування, який утворено динамічними параметрами механічної системи. За результатами математичного моделювання із застосуванням запропонованої моделі можна розробити алгоритми адаптивного керування з використанням перехресного зв’язку каналів. Це дасть можливість виявити резерви для зниження енерговитрат, підвищення стійкості, поліпшення ефективності і живучості АМР змінюваної конфігурації при автономній роботі в екстремальних умовах
Посилання
- Lopota, A., Spassky, B. (2020). Mobile ground-based robot systems for professional use. Robotics and Technical Cybernetics, 8 (1), 5–17. doi: https://doi.org/10.31776/rtcj.8101
- Tsarichenko, S., Antokhin, E., Chernova, P., Dementey, V. (2020). The state and problems of standardization and unification of military ground robot systems. Robotics and Technical Cybernetics, 8 (1), 18–23. doi: https://doi.org/10.31776/rtcj.8102
- Liu, X.-F., Li, H.-Q., Chen, Y.-J., Cai, G.-P. (2015). Dynamics and control of space robot considering joint friction. Acta Astronautica, 111, 1–18. doi: https://doi.org/10.1016/j.actaastro.2015.02.010
- Liu, G., Geng, X., Liu, L., Wang, Y. (2019). Haptic based teleoperation with master-slave motion mapping and haptic rendering for space exploration. Chinese Journal of Aeronautics, 32 (3), 723–736. doi: https://doi.org/10.1016/j.cja.2018.07.009
- Li, D., Lu, K., Cheng, Y., Zhao, W., Yang, S., Zhang, Y., Li, J., Shi, S. (2020). Dynamic analysis of multi-functional maintenance platform based on Newton-Euler method and improved virtual work principle. Nuclear Engineering and Technology, 52 (11), 2630–2637. doi: https://doi.org/10.1016/j.net.2020.04.017
- Sun, H., Zhang, Y., Xue, J., Wu, Z. (2014). The remote control system of the manipulator. Proceedings of the 33rd Chinese Control Conference. doi: https://doi.org/10.1109/chicc.2014.6896388
- Korayem, M. H., Shafei, A. M. (2015). Motion equation of nonholonomic wheeled mobile robotic manipulator with revolute-prismatic joints using recursive Gibbs–Appell formulation. Applied Mathematical Modelling, 39 (5-6), 1701–1716. doi: https://doi.org/10.1016/j.apm.2014.09.030
- Ashhepkova, N. (2022). Analysis of the inertia tensor of autonomous mobile robot. Technology Audit and Production Reserves, 1 (2 (63)), 36–40. doi: https://doi.org/10.15587/2706-5448.2022.252712
- Ashchepkova, N. S. (2020). Algorithm for adaptive control of autonomous mobile robot. Science and Education a New Dimension, VIII (30 (244)), 41–44. doi: https://doi.org/10.31174/SEND-NT2020-244VIII30-10
- Ashchepkova, N. S., Ashchepkov, S. A., Kapera, S. S. (2018). Dynamics of transport robot model during the turns. Science and Education a New Dimension, VI (19 (171)), 26–29. doi: https://doi.org/10.31174/send-nt2018-171vi19-05
- Chebly, A., Talj, R., Charara, A. (2017). Coupled Longitudinal and Lateral Control for an Autonomous Vehicle Dynamics Modeled Using a Robotics Formalism. IFAC-PapersOnLine, 50 (1), 12526–12532. doi: https://doi.org/10.1016/j.ifacol.2017.08.2190
- Mauny, J., Porez, M., Boyer, F. (2017). Symbolic Dynamic Modelling of Locomotion Systems with Persistent Contacts - Application to the 3D Bicycle. IFAC-PapersOnLine, 50 (1), 7598–7605. doi: https://doi.org/10.1016/j.ifacol.2017.08.1007
- Ma, Y. (2020). Dynamics of tracked UGVs in three-dimensional space. Dynamics and Advanced Motion Control of Off-Road UGVs, 77–94. doi: https://doi.org/10.1016/b978-0-12-818799-9.00003-7
- Gilimyanov, R. F., Pesterev, A. V., Rapoport, L. B. (2008). Motion control for a wheeled robot following a curvilinear path. Journal of Computer and Systems Sciences International, 47 (6), 987–994. doi: https://doi.org/10.1134/s1064230708060129
- Bertoncelli, F., Ruggiero, F., Sabattini, L. (2019). Wheel Slip Avoidance through a Nonlinear Model Predictive Control for Object Pushing with a Mobile Robot. IFAC-PapersOnLine, 52 (8), 25–30. doi: https://doi.org/10.1016/j.ifacol.2019.08.043
- Ashchepkova, N. S. (2021). Control of a dynamic object with a non-diagonal andnon-stationary inertia tensor moving along a trajectory. Modern engineering and innovative technologies, 18 (2), 44–52. Available at: https://www.moderntechno.de/index.php/meit/issue/view/meit18-02/meit18-02
- Bai, S., Zhou, L., Wu, G. (2014). Manipulator Dynamics. Handbook of Manufacturing Engineering and Technology, 1855–1872. doi: https://doi.org/10.1007/978-1-4471-4670-4_91
- Ashchepkova, N. S., Sheptun, Yu. D. (1997). Mathematical model of the motion of a space vehicle with a manipulator. Space Science and Technology, 3 (5-6), 34–42. doi: https://doi.org/10.15407/knit1997.05.034
- Korayem, M. H., Shafei, A. M., Seidi, E. (2014). Symbolic derivation of governing equations for dual-arm mobile manipulators used in fruit-picking and the pruning of tall trees. Computers and Electronics in Agriculture, 105, 95–102. doi: https://doi.org/10.1016/j.compag.2014.04.013
- Lloyd, S., Irani, R., Ahmadi, M. (2021). A numeric derivation for fast regressive modeling of manipulator dynamics. Mechanism and Machine Theory, 156, 104149. doi: https://doi.org/10.1016/j.mechmachtheory.2020.104149
- Khurpade, J., Dhami, S. S., Banwait, S. S. (2018). A Virtual Model of 2D Planar Manipulator Dynamics. 2018 International Conference on Smart Systems and Inventive Technology (ICSSIT). doi: https://doi.org/10.1109/icssit.2018.8748674
- Tian, S. X., Wang, S. Z. (2011). Dynamic Modeling and Simulation of a Manipulator with Joint Inertia. Information and Automation, 10–16. doi: https://doi.org/10.1007/978-3-642-19853-3_2
- Bulhakov, V. M., Yaremenko, V. V., Chernysh, O. M., Berezovyi, M. H. (2019). Teoretychna mekhanika. Kyiv: TsUL, 640.
- Kuzo, I. V., Zinko, Ya. A., Vankovych, T.-N. M. et al. (2017). Teoretychna mekhanika. Kharkiv: Folio, 576.
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2022 Natalja Ashhepkova

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.







