Планування траєкторій маніпуляційного робота зі сферичною системою координат для зняття оксидної плівки при виробництві товарного свинцю та цинку
DOI:
https://doi.org/10.15587/1729-4061.2023.286463Ключові слова:
оксидна плівка, маніпуляційний робот, планування траєкторій, програмна траєкторія, квадратична інтерполяціяАнотація
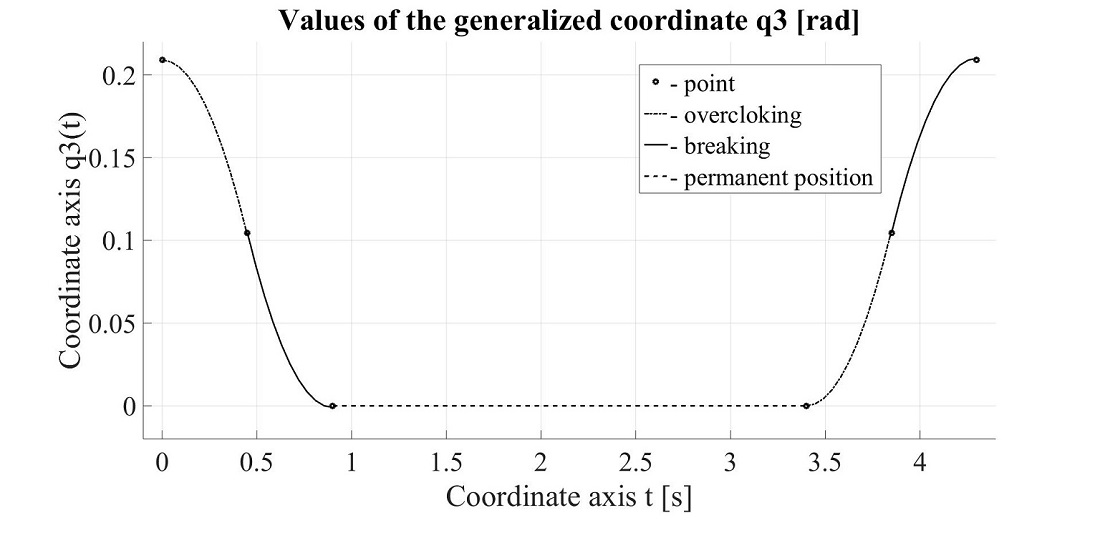
Об'єктом дослідження є технологічна операція з видалення оксидної плівки з поверхні розплаву металу ливарного виробництва товарного свинцю та цинку. Для проведення роботизаціі цієї технологічної операції пропонується застосувати маніпуляційний робот зі сферичною системою координат. Запропоновано кінематичну структуру маніпуляційного робота, який має шість ступенів рухливості та дві руки. На першій руці маніпуляційного робота закріплена рухлива, а на другій руці закріплена поворотна лопатка. Поступальним рухом першої руки рухлива лопатка нагрібає оксидну плівку на поворотну лопатку. Далі зібрана на поворотній лопатці оксидна плівка обертальним рухом скидається у спеціальну ємність. Вводяться обмеження на значення узагальнених координат, швидкостей та прискорень щодо кожного ступеня рухливості маніпуляційного робота. З урахуванням цих обмежень для реалізації цього процесу розроблено програмні траєкторії за ступенями рухливості маніпуляційного робота, які апроксимуються квадратичними поліномами. Кожен програмний рух розбивається на три ділянки, на першій ділянці здійснюють розгін із заданим прискоренням, на другій – рух із даною швидкістю, на третій – гальмування із заданим прискоренням. Для оцінки достовірності розроблених програмних траєкторій проведено моделювання в програмному середовищі MatLab версії R2015b. Отримані графіки програмних траєкторій збігаються з обчисленими значеннями узагальнених координат, інтервалів часу, швидкостей і прискорень зміни узагальнених координат за ступенями рухливості маніпуляційного робота. Період часу, необхідний для зняття оксидної плівки, дорівнює 15,88 с. На основі отриманих результатів розроблено циклограму керування маніпуляційним роботом для виконання технологічної операції зняття оксидної плівки при виробництві товарного свинцю, цинку
Посилання
- Belov, V. D. et al.; Belov, V. D. (Ed.) (2015). Liteynoe proizvodstvo. Moscow: Izd. dom MISiS, 487.
- Romanteev, Yu. P., Bystrov, V. P. (2010). Metallurgiya tyazhelykh tsvetnykh metallov. Svinets. Tsink. Kadmiy. Moscow: MISiS, 576.
- Әсембай, А. Ә. (2017). Razrabotka modeley i algoritmov postroeniya robototekhnicheskikh sistem pri robotizatsii liteynykh proizvodstv tsvetnykh metallov. Almaty: KazNITU, 170.
- Beisembayev, A., Yerbossynova, A., Pavlenko, P., Baybatshaev, M. (2023). Development of a software trajectory of a manipulation robot for removing oxide film in the production of commercial magnesium. KazATC Bulletin, 127 (4). Available at: https://vestnik.alt.edu.kz/index.php/journal/article/view/1322
- Arkhipov, M. V. (2020). Promyshlennye roboty: upravlenie manipulyatsionnymi robotami. Moscow: Yurayt, 170.
- Ruiz-Celada, O., Verma, P., Diab, M., Rosell, J. (2022). Automating Adaptive Execution Behaviors for Robot Manipulation. IEEE Access, 10, 123489–123497. doi: https://doi.org/10.1109/access.2022.3223995
- Akbari, A., Lagriffoul, F., Rosell, J. (2018). Combined heuristic task and motion planning for bi-manual robots. Autonomous Robots, 43 (6), 1575–1590. doi: https://doi.org/10.1007/s10514-018-9817-3
- Dai, H., Lu, Z., He, M., Yang, C. (2023). A Gripper-like Exoskeleton Design for Robot Grasping Demonstration. Actuators, 12 (1), 39. doi: https://doi.org/10.3390/act12010039
- Xu, S., Ou, Y., Duan, J., Wu, X., Feng, W., Liu, M. (2019). Robot trajectory tracking control using learning from demonstration method. Neurocomputing, 338, 249–261. doi: https://doi.org/10.1016/j.neucom.2019.01.052
- Kazim, I. J., Tan, Y., Qaseer, L. (2021). Integration of DE Algorithm with PDC-APF for Enhancement of Contour Path Planning of a Universal Robot. Applied Sciences, 11 (14), 6532. doi: https://doi.org/10.3390/app11146532
- Wu, G., Zhao, W., Zhang, X. (2020). Optimum time-energy-jerk trajectory planning for serial robotic manipulators by reparameterized quintic NURBS curves. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 235 (19), 4382–4393. doi: https://doi.org/10.1177/0954406220969734
- Biagiotti, L., Melchiorri, C. (2019). Trajectory generation via FIR filters: A procedure for time-optimization under kinematic and frequency constraints. Control Engineering Practice, 87, 43–58. doi: https://doi.org/10.1016/j.conengprac.2019.03.017
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2023 Akambay Beisembayev, Anargul Yerbossynova, Petro Pavlenko, Mukhit Baibatshayev

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.







