Design and research of the ground robotic system structure for weapons remote control
DOI:
https://doi.org/10.15587/1729-4061.2023.292432Keywords:
gun turret, ground robot, combat module, dynamic analysis, robotics, moment sensorAbstract
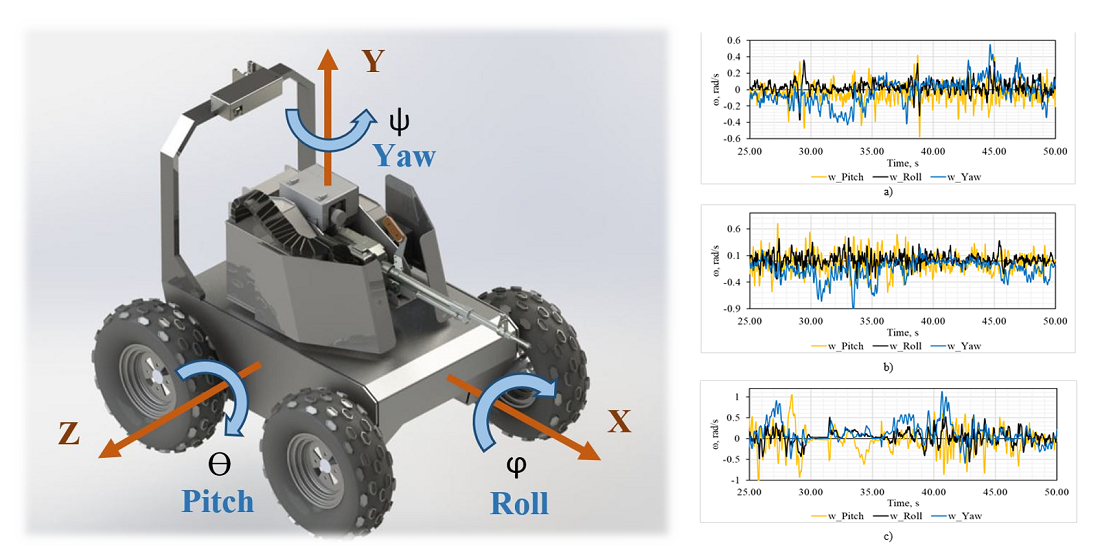
During hostilities, ground robotic systems play an important role in minimizing losses of servicemen and suspending the combat capabilities of troops. For firing, robotic complexes are equipped with gun turrets. Researchers are conducting research to improve the performance, reliability and firing accuracy of such turrets. This work describes the design and research of an experimental sample of a ground robotic system, which is equipped with a turret for controlling the position of a machine gun. The description and results of experimental studies of dynamic loads during robot movement at different speeds and road conditions are presented. It was established that the values of the maximum accelerations that must be worked out by the stabilization system during operation for the experimental design of the robot do not exceed 20 rad/s2. The possibility of using counterweights was considered to reduce the torque of the turret guidance drive while reducing the dimensions of the robotic system structure. The description of the experimental module equipped with a control and measurement system and the results of experimental studies on determining the power of the turret drives during the manipulation of the structure are presented. A procedure of dynamic analysis and the results of modeling the movement of the gun turret in the ANSYS software package are presented. The proposed method for designing the structure ensures the determination of the impact on the structure of the complex shape of loads caused by its manipulation, to compensate for the exciting loads when the robotic system is moved over the terrain. With the help of this method, it is possible to determine and minimize the power, and therefore the energy consumption, of azimuth and lifting electric drives at the design stage
References
- Zalypka, V. D. (2022). Some features of the creation and application of ground robotic complexes in the leading countries of the world and Ukraine. Scientific Bulletin of UNFU, 32 (4), 60–65. doi: https://doi.org/10.36930/40320410
- Unmanned Systems Integrated Roadmap 2017-2042 (2018). AD1059546. Technical Report. Office of the Assistant Secretary of Defense for Acquisition Washington United States. Available at: https://apps.dtic.mil/sti/citations/AD1059546
- The U.S. Army Robotic and Autonomous Systems Strategy (2017). Available at: https://mronline.org/wp-content/uploads/2018/02/RAS_Strategy.pdf
- The U.S. Army Operating Concept: Win a Complex World (2014). TRADOC Pamphlet 525-3-1. U.S. Department of the Army. Available at: https://usacac.army.mil/sites/default/files/publications/Army%20Operating%20Concept%202014%20%28TP525-3-1%29.pdf
- Sokolov, O., Hošovský, A., Trojanová, M. (2023). Design, Modelling, and Control of Continuum Arms with Pneumatic Artificial Muscles: A Review. Machines, 11 (10), 936. doi: https://doi.org/10.3390/machines11100936
- Andersson, C. A. (2022). The unmanned ground vehicles to be used in future military operations. Tiede Ja Ase, 2021 (79). Available at: https://journal.fi/ta/article/view/113769
- Boiova robotyzovana platforma «LASKA» (2017). Available at: https://www.ukrmilitary.com/2017/06/laska-ugv.html#google_vignette
- Roboneers. Available at: https://roboneers.net/
- Moskalenko, V., Kharchenko, V., Moskalenko, A., Kuzikov, B. (2023). Resilience and Resilient Systems of Artificial Intelligence: Taxonomy, Models and Methods. Algorithms, 16 (3), 165. doi: https://doi.org/10.3390/a16030165
- Li, C., Wang, X., Ma, Y., Xu, F., Yang, G. (2023). The prediction of projectile-target intersection for moving tank based on adaptive robust constraint-following control and interval uncertainty analysis. Defence Technology. doi: https://doi.org/10.1016/j.dt.2023.01.006
- Yuan, S.-S., Deng, W.-X., Yao, J.-Y., Yang, G.-L. (2023). Robust adaptive precision motion control of tank horizontal stabilizer based on unknown actuator backlash compensation. Defence Technology, 20, 72–83. doi: https://doi.org/10.1016/j.dt.2022.09.002
- Mao, B. Q., Wang, Z. Q., Chang, L., Yang, Y. Y., Xu, Z. H., Han, X. P. (2020). Research on muzzle dynamic analysis of an overhead weapon station with the viscoelastic elastomer damper. Journal of Physics: Conference Series, 1507 (10), 102042. doi: https://doi.org/10.1088/1742-6596/1507/10/102042
- Banerjee, S., Balamurugan, V., Sunil, M., Srinivasan, G. (2016). Transient Dynamic Finite Element Analysis of the Air-defence Weapon System Mount Assembly of Tracked Vehicle. Procedia Engineering, 144, 382–389. doi: https://doi.org/10.1016/j.proeng.2016.05.147
- Kari, A., Jovanovic, D., Jerkovic, D., Hristov, N. (2016). Stress analysis of integrated 12.7 mm machine gun mount. Scientific Technical Review, 66 (4), 47–51. doi: https://doi.org/10.5937/str1604047k
- Balla, J., Krist, Z., Le, C. I. (2015). Experimental study of turret-mounted automatic weapon vibrations. International Journal of Mechanics, 9 (1), 16–25. Available at: https://www.researchgate.net/publication/275207714
- Anguek, O., Bounab, B. (2022). Multi-objective design optimization of a Turret’s U-bracket mounted on moving platform. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 236 (24), 11371–11388. doi: https://doi.org/10.1177/09544062221115106
- Vanyeyev, S. M., Miroshnichenko, D. V., Rodymchenko, T. S., Protsenko, M., Smolenko, D. V. (2019). Data Measuring System for Torque Measurement on Running Shafts Based on a Non-Contact Torsional Dynamometer. Journal of Engineering Sciences, 6 (2), e17–e23. doi: https://doi.org/10.21272/es.2019.6(2).e3
- Kulinchenko, H., Zhurba, V., Panych, A., Leontiev, P. (2023). Development of the method of constructing the expander turbine rotation speed regulator. Eastern-European Journal of Enterprise Technologies, 2 (2 (122)), 44–52. doi: https://doi.org/10.15587/1729-4061.2023.276587
- Nurprasetio, I. P., Aziz, M., Budiman, B. A., Afwan, A. A. (2018). Development of Static and Dynamic Online Measurement System for Ground Vehicles. 2018 5th International Conference on Electric Vehicular Technology (ICEVT). doi: https://doi.org/10.1109/icevt.2018.8628346
- Weidinger, P., Foyer, G., Kock, S., Gnauert, J., Kumme, R. (2019). Calibration of torque measurement under constant rotation in a wind turbine test bench. Journal of Sensors and Sensor Systems, 8 (1), 149–159. doi: https://doi.org/10.5194/jsss-8-149-2019
- Popelka, J., Scholz, C. (2018). Measuring the Torque of a Combustion Engine. MATEC Web of Conferences, 220, 03006. doi: https://doi.org/10.1051/matecconf/201822003006
- Ivanov, V., Botko, F., Dehtiarov, I., Kočiško, M., Evtuhov, A., Pavlenko, I., Trojanowska, J. (2022). Development of Flexible Fixtures with Incomplete Locating: Connecting Rods Machining Case Study. Machines, 10 (7), 493. doi: https://doi.org/10.3390/machines10070493
- Ivanov, V., Dehtiarov, I., Pavlenko, I., Liaposhchenko, O., Zaloga, V. (2019). Parametric Optimization of Fixtures for Multiaxis Machining of Parts. Advances in Manufacturing II, 335–347. doi: https://doi.org/10.1007/978-3-030-18789-7_28
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Ivan Dehtiarov, Petro Leontiev, Dmytro Miroshnychenko, Vadym Lanchynskyi, Pavlo Buhaiets

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.






