Знання-орієтовані технології прийняття рішень під час руху суден у стиснених водах
DOI:
https://doi.org/10.31498/2225-6733.49.2.2024.321392Ключові слова:
судноводіння, безпека, безпека судноплавства, безпека на морі, водний морський транспорт, знання-орієнтована система, система підтримки прийняття рішення, навігаційна обстановка, навігаційна ситуація, навігація, нейронна мережа, судноАнотація
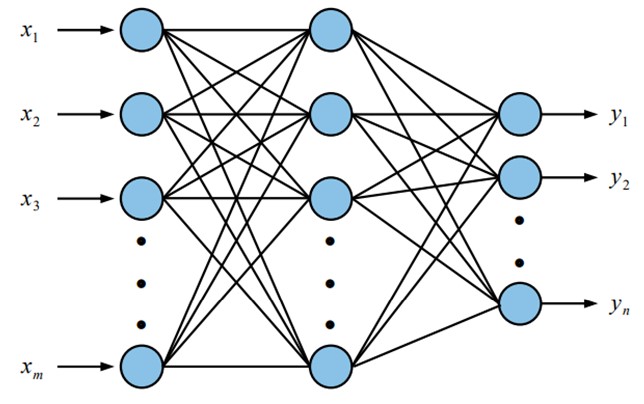
У статті визначено, що найбільш поширеною причиною аварійності, до 80% випадків, є проблема «людського елементу», що вимагає побудови систем підтримки прийняття рішення судноводіння, які здатні з використанням знання-орієнтованих технологій, що відповідають порядку мислення людини, надавати судноводієві прогнозовані дані. Нейромережеві алгоритми дозволяють враховувати зазначені особливості, будучи спеціально орієнтованими для рішення завдань прогнозування. Нейронні мережі виступають в якості універсального апроксиматору функцій декількох змінних, що робить їх перспективним інструментом для рішення завдань маневрування суден у стиснутих водах. Нейронна мережа, що моделює динаміку судна, навчається на основі зразків, отриманих з використанням рівнянь руху судна (кінематичних або диференціальних динамічних). Визначено, що нейромережеві алгоритми дозволяють враховувати зазначені особливості, будучи спеціально орієнтованими для рішення подібного роду завдань. Зчислення шляху судна може виконуватися з використанням різного набору навігаційних датчиків. Вихідний сигнал системи зчислення може представляти собою координати судна, їх збільшення, що становлять відносну швидкість, та інші величини. Звичайно, самим бажаним варіантом буде випадок, коли система зчислення визначає координати судна або хоча б їх приріст. Перевага використання у якості виходу мережі саме координат має два аспекти. Вибір моделі нейронної мережі передує наступному етапу, на якому виконується її навчання. При цьому виникає проблема розробки методу отримання необхідної кількості та якості зразків. Важливу роль відіграє також вибір того або іншого методу навчання нейронної мережі. Вибір моделі нейронної мережі передує наступному етапу, на якому виконується її навчання. При цьому виникає проблема розробки методу отримання необхідної кількості та якості зразків. Важливу роль відіграє також вибір того або іншого методу навчання нейронної мережі
Посилання
- Bowditch N. American Practical Navigator. Bethesda, Maryland : National imagery and mapping agency, 1995. 882 p.
- Simsir U., Ertugrul S. Prediction of manually controlled vessels’ position and course navigating in narrow waterways using Artificial Neural Networks. Applied Soft Computing. 2009. Vol. 9. Iss. 4. Pp. 1217-1224. DOI: https://doi.org/10.1016/j.asoc.2009.03.002.
- Xu T., Liu X., Yang X. Ship Trajectory Online Prediction Based on BP Neural Network Algorithm. Proceedings of the 2011 International Conference of Information Technology, Computer Engineering and Management Sciences, Nanjing, China, 24-25 September 2011. Pp. 103-106. DOI: https://doi.org/10.1109/ICM.2011.288.
- Ship Trajectory Reconstruction from AIS Sensory Data via Data Quality Control and Prediction / X. Chen et al. Mathematical Problems in Engineering. 2020. Vol. 2020. Pp. 1-9. DOI: https://doi.org/10.1155/2020/7191296.
- Borkowski P. The Ship Movement Trajectory Prediction Algorithm Using Navigational Data Fusion. Sensors. 2017. Vol. 17. Article 1432. DOI: https://doi.org/10.3390/s17061432.
- Lacki M. Intelligent Prediction of Ship Maneuvering. TransNav the International Journal on Marine Navigation and Safety of Sea Transportation. 2016. Vol. 10(3). Pp. 511-516. DOI: https://doi.org/10.12716/1001.10.03.17.
- Employing traditional machine learning algorithms for big data streams analysis: The case of object trajectory prediction / A. Valsamis et al. Journal of Systems and Software. 2017. Vol. 127. Pp. 249-257. DOI: https://doi.org/10.1016/j.jss.2016.06.016.
- Automatic ship route design between two ports: A data-driven method / Y. Wen et al. Applied Ocean Research. 2020. Vol. 96. Article 102049. DOI: https://doi.org/10.1016/j.apor.2019.102049.
- Neuromorphic electronics based on copying and pasting the brain / Ham D., Park H., Hwang S., Kim K. Nature electronics. 2021. Vol. 4. Pp. 635-644. DOI: https://doi.org/10.1038/s41928-021-00646-1.
- Underactuated control and analysis of single blade installation using a jackup installation vessel and active tugger line force control / Z. Ren et al. Marine Structures. 2023. Vol. 88. Article 103338. DOI: https://doi.org/10.1016/j.marstruc.2022.103338.
- Сhansarkar M. Neural Networks in GPS Navigation. GPS Solutions. 2000. Vol. 4. Pp. 14-18. DOI: https://doi.org/10.1007/PL00012837.
- Mosavi M. R. Precise Real-Time Positioning with a Low Cost GPS Engine using Neural Networks. Survey Review. 2007. Vol. 39. Pp. 316-327. DOI: https://doi.org/10.1179/175227007X197228.
- Jwo D.J., Pai C.-F. Incorporation of Neural Network State Estimator for GPS Attitude Determination. The Journal of Navigation. 2014. Vol. 57. Pp. 117-134. DOI: https://doi.org/10.1017/S0373463303002625.
- Waterline Guidelines 2011. Directorate-General for Public Works and Water Management, Rijkswaterstaat, 2011. 179 p.
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Журнал "Вісник Приазовського державного технічного університету. Серія: Технічні науки" видається під ліцензією СС-BY (Ліцензія «Із зазначенням авторства»).
Дана ліцензія дозволяє поширювати, редагувати, поправляти і брати твір за основу для похідних навіть на комерційній основі із зазначенням авторства. Це найзручніша з усіх пропонованих ліцензій. Рекомендується для максимального поширення і використання неліцензійних матеріалів.

Автори, які публікуються в цьому журналі, погоджуються з наступними умовами:
1. Автори залишають за собою право на авторство своєї роботи та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons Attribution License, яка дозволяє іншим особам вільно розповсюджувати опубліковану роботу з обов'язковим посиланням на авторів оригінальної роботи та першу публікацію роботи в цьому журналі.
2. Автори мають право укладати самостійні додаткові угоди, які стосуються неексклюзивного поширення роботи в тому вигляді, в якому вона була опублікована цим журналом (наприклад, розміщувати роботу в електронному сховищі установи або публікувати у складі монографії), за умови збереження посилання на першу публікацію роботи в цьому журналі.





