Design and kinematic investigation of an actuated prosthetic ankle during walking
DOI:
https://doi.org/10.15587/1729-4061.2022.265736Keywords:
prosthetic ankle, ankle kinematics, above knee amputee, prosthetic gait, energy storage and release footAbstract
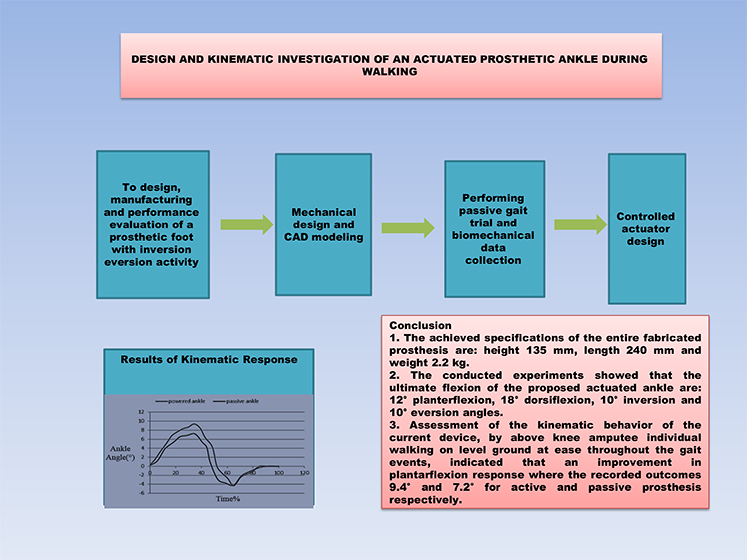
Due to the varied needs of persons who have lost a lower limb in their everyday lives, ankle-foot prosthetic technology is continually evolving. Numerous prosthetic ankles have been created in recent years to restore the ankle function of lower limb amputees. Most ankle foot prostheses, on the other hand, are passive, such as the solid ankle cushion heel and the energy storage and release foot (ESAR). The solid ankle foot can only provide steady vertical support during ambulation; however, the ESAR foot can store energy and gradually release it throughout human walking periods, hence increasing the walking pace of amputees. The aim of this work is to describe the design and manufacture of an actuated ankle-foot prosthesis. The main benefit of powered ankles is that they are capable of mimicking natural stride, particularly in steep or uneven terrain conditions. The primary objective is to establish two degrees of freedom of ankle rotation in two planes, plantar flexion and dorsiflexion in the sagittal plane, besides inversion and eversion in the frontal plane. As software can improve the gait stability, an automatic modifiable transmission arrangement was prepared for delivering the current design motions in the sagittal plane based on empirical collected biomechanical data related to passive prosthetic normal gait circumstances. However, the ankle rolling in the frontal plane was guided mechanically by means of mono leaf spring. The majority of the ankle mechanical components are made of 7075-T6 aluminum alloy and are integrated onto ESAR carbon fiber laminated foot. For a unilateral above-knee amputee, the ankle function at self-selected walking was assessed, achieving maximum results of 10° inversion, 10° eversion, 12° plantar flexion and 18° dorsiflexion ankle angles. Also, the patient gait experiment in a normal cadence showed an improvement in plantar flexion behavior for the powered ankle in contrast with the passive ankle
References
- Flynn, L., Geeroms, J., Jimenez-Fabian, R., Heins, S., Vanderborght, B., Munih, M., Molino Lova, R., Vitiello, N., Lefeber, D. (2018). The Challenges and Achievements of Experimental Implementation of an Active Transfemoral Prosthesis Based on Biological Quasi-Stiffness: The CYBERLEGs Beta-Prosthesis. Frontiers in Neurorobotics, 12. doi: https://doi.org/10.3389/fnbot.2018.00080
- Sun, X., Sugai, F., Okada, K., Inaba, M. (2018). Design, Control and Preliminary Test of Robotic Ankle Prosthesis. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid. doi: https://doi.org/10.1109/iros.2018.8594498
- Kim, M., Chen, T., Chen, T., Collins, S. H. (2018). An Ankle–Foot Prosthesis Emulator With Control of Plantarflexion and Inversion–Eversion Torque. IEEE Transactions on Robotics, 34 (5), 1183–1194. doi: https://doi.org/10.1109/tro.2018.2830372
- Gabert, L., Hood, S., Tran, M., Cempini, M., Lenzi, T. (2020). A Compact, Lightweight Robotic Ankle-Foot Prosthesis: Featuring a Powered Polycentric Design. IEEE Robotics & Automation Magazine, 27 (1), 87–102. doi: https://doi.org/10.1109/mra.2019.2955740
- Subhi, K. A., Hussein, E. K., Al-Hamadani, H. R. D., Sharaf, H. K. (2022). Investigation of the mechanical performance of the composite prosthetic keel based on the static load: a computational analysis. Eastern-European Journal of Enterprise Technologies, 3 (7 (117)), 22–30. doi: https://doi.org/10.15587/1729-4061.2022.256943
- Ficanha, E. M., Ribeiro, G. A., Dallali, H., Rastgaar, M. (2016). Design and Preliminary Evaluation of a Two DOFs Cable-Driven Ankle–Foot Prosthesis with Active Dorsiflexion–Plantarflexion and Inversion–Eversion. Frontiers in Bioengineering and Biotechnology, 4. doi: https://doi.org/10.3389/fbioe.2016.00036
- Smith, K. C. (2016). The Mechanical Response and Parametric Optimization of Ankle Foot Devices”. Orlando: University of Central Florida.
- Holgate, R. L. (2017). Advancements in Prosthetics and Joint Mechanisms. Arizona: Arizona State University. Available at: https://keep.lib.asu.edu/items/155798
- Childers, W. L., Takahashi, K. Z. (2018). Increasing prosthetic foot energy return affects whole-body mechanics during walking on level ground and slopes. Scientific Reports, 8 (1). doi: https://doi.org/10.1038/s41598-018-23705-8
- Gao, F., Liu, Y., Liao, W.-H. (2019). Implementation and Testing of Ankle-Foot Prosthesis With a New Compensated Controller. IEEE/ASME Transactions on Mechatronics, 24 (4), 1775–1784. doi: https://doi.org/10.1109/tmech.2019.2928892
- Agboola-Dobson, A., Wei, G., Ren, L. (2019). Biologically Inspired Design and Development of a Variable Stiffness Powered Ankle-Foot Prosthesis. Journal of Mechanisms and Robotics, 11 (4). doi: https://doi.org/10.1115/1.4043603
- Dong, D., Ge, W., Wang, J., Sun, Y., Zhao, D. (2018). Optimal Design and Analysis of a Powered Ankle-Foot Prosthesis with Adjustable Actuation Stiffness. Recent Developments in Mechatronics and Intelligent Robotics, 578–587. doi: https://doi.org/10.1007/978-3-030-00214-5_73
- Naseri, A., Mohammadi Moghaddam, M., Gharini, M., Ahmad Sharbafi, M. (2020). A Novel Adjustable Damper Design for a Hybrid Passive Ankle Prosthesis. Actuators, 9 (3), 74. doi: https://doi.org/10.3390/act9030074
- Park, K., Ahn, H.-J., Lee, K.-H., Lee, C.-H. (2020). Development and Performance Verification of a Motorized Prosthetic Leg for Stair Walking. Applied Bionics and Biomechanics, 2020, 1–14. doi: https://doi.org/10.1155/2020/8872362
- Alleva, S., Antonelli, M. G., Beomonte Zobel, P., Durante, F. (2020). Biomechanical Design and Prototyping of a Powered Ankle-Foot Prosthesis. Materials, 13 (24), 5806. doi: https://doi.org/10.3390/ma13245806
- Bhat, S. G., Redkar, S., Sugar, T. (2020). Design and Development of a Passive Prosthetic Ankle. Journal of Medical Devices, ASME 2020. doi: https://doi.org/10.13140/RG.2.2.36614.80963
- Zagoya-López, J., Zúñiga-Avilés, L. A., Vilchis-González, A. H., Ávila-Vilchis, J. C. (2021). Foot/Ankle Prostheses Design Approach Based on Scientometric and Patentometric Analyses. Applied Sciences, 11 (12), 5591. doi: https://doi.org/10.3390/app11125591
- Tryggvason, H. (2021). Smart Material Prosthetic Ankle Employing Material Properties for variable Stiffness. Reykjavik: University of Iceland. Available at: https://hdl.handle.net/20.500.11815/2618
- AOPA’S Prosthetic Foot Project (2010). American Orthotic and Prosthetic. Available at: https://www.aopanet.org/wp-content/uploads/2013/12/Prosthetic_Foot_Project.pdf
- Cherelle, P., Grosu, V., Flynn, L., Junius, K., Moltedo, M., Vanderborght, B., Lefeber, D. (2017). The Ankle Mimicking Prosthetic Foot 3 – Locking mechanisms, actuator design, control and experiments with an amputee. Robotics and Autonomous Systems, 91, 327–336. doi: https://doi.org/10.1016/j.robot.2017.02.004
- Masum, H., Bhaumik, S., Ray, R. (2014). Conceptual Design of a Powered Ankle-foot Prosthesis for Walking with Inversion and Eversion. Procedia Technology, 14, 228–235. doi: https://doi.org/10.1016/j.protcy.2014.08.030
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2022 Mohammed Hameed, Ahmed Ali, Mohammed Saleh

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.






