Розробка і кінематичне дослідження тягового протезу гомілковостопного суглоба під час ходьби
DOI:
https://doi.org/10.15587/1729-4061.2022.265736Ключові слова:
протез гомілковостопного суглоба, кінематика гомілковостопного суглоба, людина з ампутованими вище коліна кінцівками, ходьба на протезі, стопа з накопиченням і вивільненням енергіїАнотація
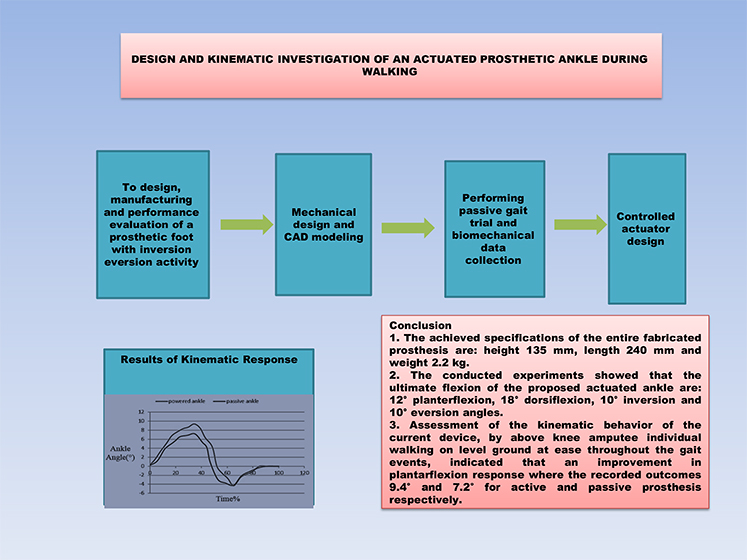
У зв'язку з різними потребами людей, які втратили нижню кінцівку у повсякденному житті, технологія протезування гомілковостопного суглоба постійно розвивається. В останні роки була створена велика кількість протезів гомілковостопного суглоба для відновлення функції гомілкостопа у людей з ампутованими нижніми кінцівками. З іншого боку, більшість протезів гомілковостопного суглоба є пасивними, наприклад стопа з твердим гомілковостопним суглобом і пружною п'ятою та стопа з накопиченням і вивільненням енергії (ESAR). Твердий гомілковостоп дозволяє забезпечити лише стійку вертикальну опору під час пересування, тоді як стопа ESAR може накопичувати енергію і поступово вивільняти її під час ходьби, тим самим збільшуючи темп ходьби людей з ампутованими кінцівками. Метою даної роботи є опис конструкції та виготовлення тягового протезу гомілковостопного суглоба. Головна перевага тягових гомілковостопних суглобів полягає в тому, що вони здатні імітувати природний крок, особливо в умовах крутої чи нерівної місцевості. Основна мета полягає в тому, щоб встановити два ступені свободи обертання гомілковостопного суглоба в двох площинах, підошовне згинання і тильне згинання в сагітальній площині, а також інверсія та еверсія у фронтальній площині. Оскільки стійкість ходи може бути покращена за допомогою програмного забезпечення, було підготовлено автоматичний модифікований пристрій передачі для виконання поточних розрахункових рухів в сагітальній площині на основі зібраних емпіричних біомеханічних даних, пов'язаних з умовами ходьби на пасивному протезі. Однак обертання гомілковостопного суглоба у фронтальній площині здійснювалося механічно за допомогою монолистової ресори. Більшість механічних компонентів гомілковостопного суглоба виготовлені з алюмінієвого сплаву 7075-T6 та вбудовані в стопу ESAR з шаруватого вуглепластику. Проведено оцінку функції гомілковостопного суглоба людини з односторонньою ампутацією вище коліна при самостійній ходьбі з досягненням максимальних результатів 10° інверсії, 10° еверсії, 12° підошовного згинання і 18° тильного згинання гомілковостопного суглоба. Крім того, випробування ходи пацієнта в нормальному темпі показало поліпшення підошовного згинання тягового гомілковостопного суглоба на відміну від пасивного
Посилання
- Flynn, L., Geeroms, J., Jimenez-Fabian, R., Heins, S., Vanderborght, B., Munih, M., Molino Lova, R., Vitiello, N., Lefeber, D. (2018). The Challenges and Achievements of Experimental Implementation of an Active Transfemoral Prosthesis Based on Biological Quasi-Stiffness: The CYBERLEGs Beta-Prosthesis. Frontiers in Neurorobotics, 12. doi: https://doi.org/10.3389/fnbot.2018.00080
- Sun, X., Sugai, F., Okada, K., Inaba, M. (2018). Design, Control and Preliminary Test of Robotic Ankle Prosthesis. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid. doi: https://doi.org/10.1109/iros.2018.8594498
- Kim, M., Chen, T., Chen, T., Collins, S. H. (2018). An Ankle–Foot Prosthesis Emulator With Control of Plantarflexion and Inversion–Eversion Torque. IEEE Transactions on Robotics, 34 (5), 1183–1194. doi: https://doi.org/10.1109/tro.2018.2830372
- Gabert, L., Hood, S., Tran, M., Cempini, M., Lenzi, T. (2020). A Compact, Lightweight Robotic Ankle-Foot Prosthesis: Featuring a Powered Polycentric Design. IEEE Robotics & Automation Magazine, 27 (1), 87–102. doi: https://doi.org/10.1109/mra.2019.2955740
- Subhi, K. A., Hussein, E. K., Al-Hamadani, H. R. D., Sharaf, H. K. (2022). Investigation of the mechanical performance of the composite prosthetic keel based on the static load: a computational analysis. Eastern-European Journal of Enterprise Technologies, 3 (7 (117)), 22–30. doi: https://doi.org/10.15587/1729-4061.2022.256943
- Ficanha, E. M., Ribeiro, G. A., Dallali, H., Rastgaar, M. (2016). Design and Preliminary Evaluation of a Two DOFs Cable-Driven Ankle–Foot Prosthesis with Active Dorsiflexion–Plantarflexion and Inversion–Eversion. Frontiers in Bioengineering and Biotechnology, 4. doi: https://doi.org/10.3389/fbioe.2016.00036
- Smith, K. C. (2016). The Mechanical Response and Parametric Optimization of Ankle Foot Devices”. Orlando: University of Central Florida.
- Holgate, R. L. (2017). Advancements in Prosthetics and Joint Mechanisms. Arizona: Arizona State University. Available at: https://keep.lib.asu.edu/items/155798
- Childers, W. L., Takahashi, K. Z. (2018). Increasing prosthetic foot energy return affects whole-body mechanics during walking on level ground and slopes. Scientific Reports, 8 (1). doi: https://doi.org/10.1038/s41598-018-23705-8
- Gao, F., Liu, Y., Liao, W.-H. (2019). Implementation and Testing of Ankle-Foot Prosthesis With a New Compensated Controller. IEEE/ASME Transactions on Mechatronics, 24 (4), 1775–1784. doi: https://doi.org/10.1109/tmech.2019.2928892
- Agboola-Dobson, A., Wei, G., Ren, L. (2019). Biologically Inspired Design and Development of a Variable Stiffness Powered Ankle-Foot Prosthesis. Journal of Mechanisms and Robotics, 11 (4). doi: https://doi.org/10.1115/1.4043603
- Dong, D., Ge, W., Wang, J., Sun, Y., Zhao, D. (2018). Optimal Design and Analysis of a Powered Ankle-Foot Prosthesis with Adjustable Actuation Stiffness. Recent Developments in Mechatronics and Intelligent Robotics, 578–587. doi: https://doi.org/10.1007/978-3-030-00214-5_73
- Naseri, A., Mohammadi Moghaddam, M., Gharini, M., Ahmad Sharbafi, M. (2020). A Novel Adjustable Damper Design for a Hybrid Passive Ankle Prosthesis. Actuators, 9 (3), 74. doi: https://doi.org/10.3390/act9030074
- Park, K., Ahn, H.-J., Lee, K.-H., Lee, C.-H. (2020). Development and Performance Verification of a Motorized Prosthetic Leg for Stair Walking. Applied Bionics and Biomechanics, 2020, 1–14. doi: https://doi.org/10.1155/2020/8872362
- Alleva, S., Antonelli, M. G., Beomonte Zobel, P., Durante, F. (2020). Biomechanical Design and Prototyping of a Powered Ankle-Foot Prosthesis. Materials, 13 (24), 5806. doi: https://doi.org/10.3390/ma13245806
- Bhat, S. G., Redkar, S., Sugar, T. (2020). Design and Development of a Passive Prosthetic Ankle. Journal of Medical Devices, ASME 2020. doi: https://doi.org/10.13140/RG.2.2.36614.80963
- Zagoya-López, J., Zúñiga-Avilés, L. A., Vilchis-González, A. H., Ávila-Vilchis, J. C. (2021). Foot/Ankle Prostheses Design Approach Based on Scientometric and Patentometric Analyses. Applied Sciences, 11 (12), 5591. doi: https://doi.org/10.3390/app11125591
- Tryggvason, H. (2021). Smart Material Prosthetic Ankle Employing Material Properties for variable Stiffness. Reykjavik: University of Iceland. Available at: https://hdl.handle.net/20.500.11815/2618
- AOPA’S Prosthetic Foot Project (2010). American Orthotic and Prosthetic. Available at: https://www.aopanet.org/wp-content/uploads/2013/12/Prosthetic_Foot_Project.pdf
- Cherelle, P., Grosu, V., Flynn, L., Junius, K., Moltedo, M., Vanderborght, B., Lefeber, D. (2017). The Ankle Mimicking Prosthetic Foot 3 – Locking mechanisms, actuator design, control and experiments with an amputee. Robotics and Autonomous Systems, 91, 327–336. doi: https://doi.org/10.1016/j.robot.2017.02.004
- Masum, H., Bhaumik, S., Ray, R. (2014). Conceptual Design of a Powered Ankle-foot Prosthesis for Walking with Inversion and Eversion. Procedia Technology, 14, 228–235. doi: https://doi.org/10.1016/j.protcy.2014.08.030
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2022 Mohammed Hameed, Ahmed Ali, Mohammed Saleh

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.







