Developing a method for determining the time parameters of a mobile fire extinguisher operator
DOI:
https://doi.org/10.15587/1729-4061.2022.266825Keywords:
mobile fire installation, operator, time parameters, dynamic parameters, frequency characteristicsAbstract
The object of this study is the process of functioning of the "man-machine" system on the example of the operator of a mobile fire installation. One of the issue when building models of such systems is to determine the parameters a priori of a given model of the human operator – the delay time and a time constant.
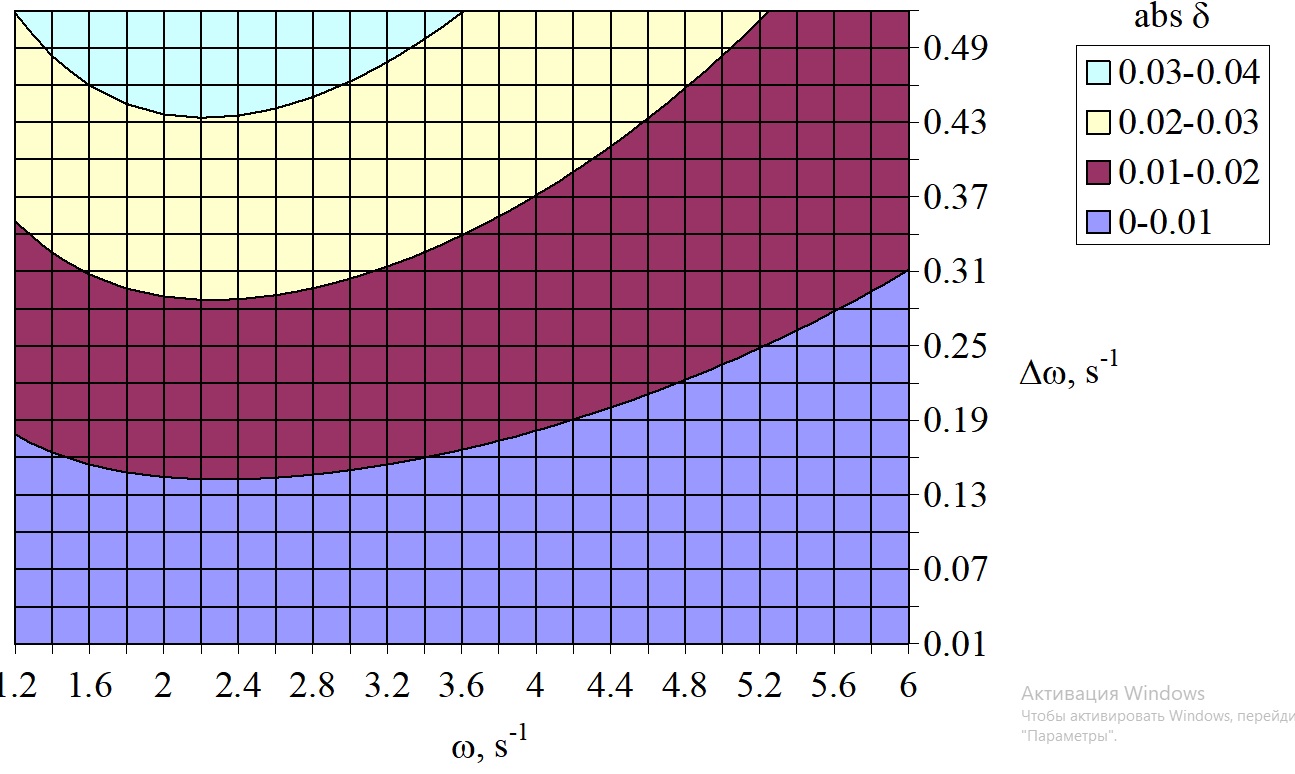
For one of the promising means of fire extinguishing such as a mobile installation based on Segway, a method for determining the time parameters of the operator has been devised. A feature of the method is the use of approximation of partial derivatives from the phase-frequency characteristics of the operator in frequency, determined at two frequencies. This approach makes it possible to get rid of the need to use transcendental equations to determine time parameters and move on to an algebraic equation. To substantiate the values of frequencies at which partial derivatives are approximated, tolerance accuracy criteria are used. It is shown that working range of the operator of the mobile fire installation is in the infra-frequency region. Therefore, it is advisable to determine the phase-frequency characteristics of the operator numerically using an array of data on the transition function of the operator. An array of such data is formed using the Kotelnikov-Nyquist-Shannon theorem. A list of sequential procedures for the implementation of the method for determining the time parameters of the operator of a mobile fire installation is provided. The method for determining the time parameters of the operator of a mobile fire installation was verified by solving a test problem. It is shown that with permissible errors in the time parameters of the operator at the level of 5.0 %, the errors in their determining do not exceed 2.0 %.
The reported results can be used for determining the dynamic parameters of the model of the operator of the fire installation, provided that the tolerance criterion for accuracy is set.
References
- Paris Firefighters Used This Remote-Controlled Robot to Extinguish the Notre Dame Blaze. Available at: https://spectrum.ieee.org/colossus-the-firefighting-robot-that-helped-save-notre-dame#toggle-gdpr
- Firefighter Drones – How Drones are Being Used for Helping Fire Departments. Available at: https://dronenodes.com/firefighter-drones/
- Segway-like robots designed to help firefighters and save lives. Available at: https://newatlas.com/firefighting-robot-ffr/27849/
- Villani, V., Czerniak, J. N., Sabattini, L., Mertens, A., Fantuzzi, C. (2019). Measurement and classification of human characteristics and capabilities during interaction tasks. Paladyn, Journal of Behavioral Robotics, 10 (1), 182–192. doi: https://doi.org/10.1515/pjbr-2019-0016
- Müller, R., Oehm, L. (2018). Process industries versus discrete processing: how system characteristics affect operator tasks. Cognition, Technology & Work, 21 (2), 337–356. doi: https://doi.org/10.1007/s10111-018-0511-1
- Kaber, D. B. (2017). Issues in Human–Automation Interaction Modeling: Presumptive Aspects of Frameworks of Types and Levels of Automation. Journal of Cognitive Engineering and Decision Making, 12 (1), 7–24. doi: https://doi.org/10.1177/1555343417737203
- Kopyt, A., Dziewoński, T., Jastrzębski, D., Golon, K., Mirosław, M. (2017). Modeling of a human driver for a car driving simulator. ANSS '17: Proceedings of the 50th Annual Simulation Symposium. doi: https://doi.org/10.22360/springsim.2017.anss.005
- Sobina, V., Hizhnyak, A., Abramov, Yu. (2019). Determination of parameters of the model of the operator of a mobile fire installation. Problemy pozharnoy bezopasnosti, 45, 161–166. Available at: https://nuczu.edu.ua/sciencearchive/ProblemsOfFireSafety/vol45/Sobina.pdf
- Aydin, Y., Tokatli, O., Patoglu, V., Basdogan, C. (2018). Stable Physical Human-Robot Interaction Using Fractional Order Admittance Control. IEEE Transactions on Haptics, 11 (3), 464–475. doi: https://doi.org/10.1109/toh.2018.2810871
- Yao, B., Zhou, Z., Wang, L., Xu, W., Liu, Q., Liu, A. (2018). Sensorless and adaptive admittance control of industrial robot in physical human-robot interaction. Robotics and Computer-Integrated Manufacturing, 51, 158–168. doi: https://doi.org/10.1016/j.rcim.2017.12.004
- Tölgyessy, M., Dekan, M., Hubinský, P. (2018). Human-Robot Interaction Using Pointing Gestures. Proceedings of the 2nd International Symposium on Computer Science and Intelligent Control. doi: https://doi.org/10.1145/3284557.3284718
- Nemec, D., Janota, A., Gregor, M., Hruboš, M., Pirník, R. (2017). Control of the mobile robot by hand movement measured by inertial sensors. Electrical Engineering, 99 (4), 1161–1168. doi: https://doi.org/10.1007/s00202-017-0614-3
- Buldakova, T. I., Suyatinov, S. I. (2019). Hierarchy of Human Operator Models for Digital Twin. 2019 International Russian Automation Conference (RusAutoCon). doi: https://doi.org/10.1109/rusautocon.2019.8867602
- Iqbal, M. U., Srinivasan, R. (2018). Simulator based performance metrics to estimate reliability of control room operators. Journal of Loss Prevention in the Process Industries, 56, 524–530. doi: https://doi.org/10.1016/j.jlp.2017.10.011
- Surya Atman, M. W., Noda, K., Funada, R., Yamauchi, J., Hatanaka, T., Fujita, M. (2019). On Passivity-Shortage of Human Operators for A Class of Semi-autonomous Robotic Swarms. IFAC-PapersOnLine, 51 (34), 21–27. doi: https://doi.org/10.1016/j.ifacol.2019.01.008
- Khudyakova, E. P., Sedelkova, V. A., Tarasenkov, G. G., Chertopolokhov, V. A., Belousova, M. D., Natura, E. S. (2021). Characteristics of operator performance in controlling a virtual lunar rover during simulated lunar gravity. AIP Conference Proceedings. doi: https://doi.org/10.1063/5.0035989
- Van Grootheest, H. A. (2017). Human-Operator Identification with Time-Varying ARX Models. TU Delft. Available at: https://repository.tudelft.nl/islandora/object/uuid:da69d1cf-3274-466f-bbc2-573f571d154e?collection=education
- Abramov, Yu. O., Tyshchenko, Ye. O., Sobyna, V. O. (2017). Pat. No. 119180 UA. Mobilna pozhezhna ustanovka. No. u201704071; declareted: 24.04.2017; published: 11.09.2017, Bul. No. 17. Available at: https://uapatents.com/4-119180-mobilna-pozhezhna-ustanovka.html
- Abramov, Yu., Basmanov, A. (2017). Modeli i kharakteristiki protsessa tusheniya pozharov klassa B. LAP LAMBERT Academic Publishing, 192.
- Abramov, Yu. O., Sobyna, V. O., Khyzhniak, A. A., Zakora, O. V., Bezuhla, Yu. S. (2020). Pat. No. 143723 UA. Sposib vyznachennia dynamichnykh kharakterystyk operatora mobilnoi pozhezhnoi ustanovky. No. u202001028; declareted: 17.02.2020; published: 10.08.2020, Bul. No. 15. Available at: https://base.uipv.org/searchINV/search.php?action=viewdetails&IdClaim=270522
- Abramov, Yu. O., Sobyna, V. O., Tyshchenko, Ye. O., Khyzhniak, A. A., Danilin, O. M. (2019). Pat. No. 135301 UA. Prystriy dlia vyznachennia kharakterystyk operatora mobilnoho pozhezhnoho robota. No. 201900596; declareted: 21.01.2019; published: 25.06.2019, Bul. No. 12. Available at: https://base.uipv.org/searchINV/search.php?action=viewdetails&IdClaim=259667
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2022 Yuriy Abramov, Oleksii Basmanov, Vitaliy Sobyna, Dmitry Sokolov, Ihor Cherepnov

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.





