Розробка метода визначення часових параметрів оператора мобільної пожежної установки
DOI:
https://doi.org/10.15587/1729-4061.2022.266825Ключові слова:
мобільна пожежна установка, оператор, часові параметри, динамічні параметри, частотні характеристикиАнотація
Об’єктом дослідження є процес функціонування системи «людина – машина» на прикладі оператора мобільної пожежної установки. Однією з проблем при побудові моделей таких систем є визначення параметрів апріорі заданої моделі людини-оператора – часу затримки та постійної часу.
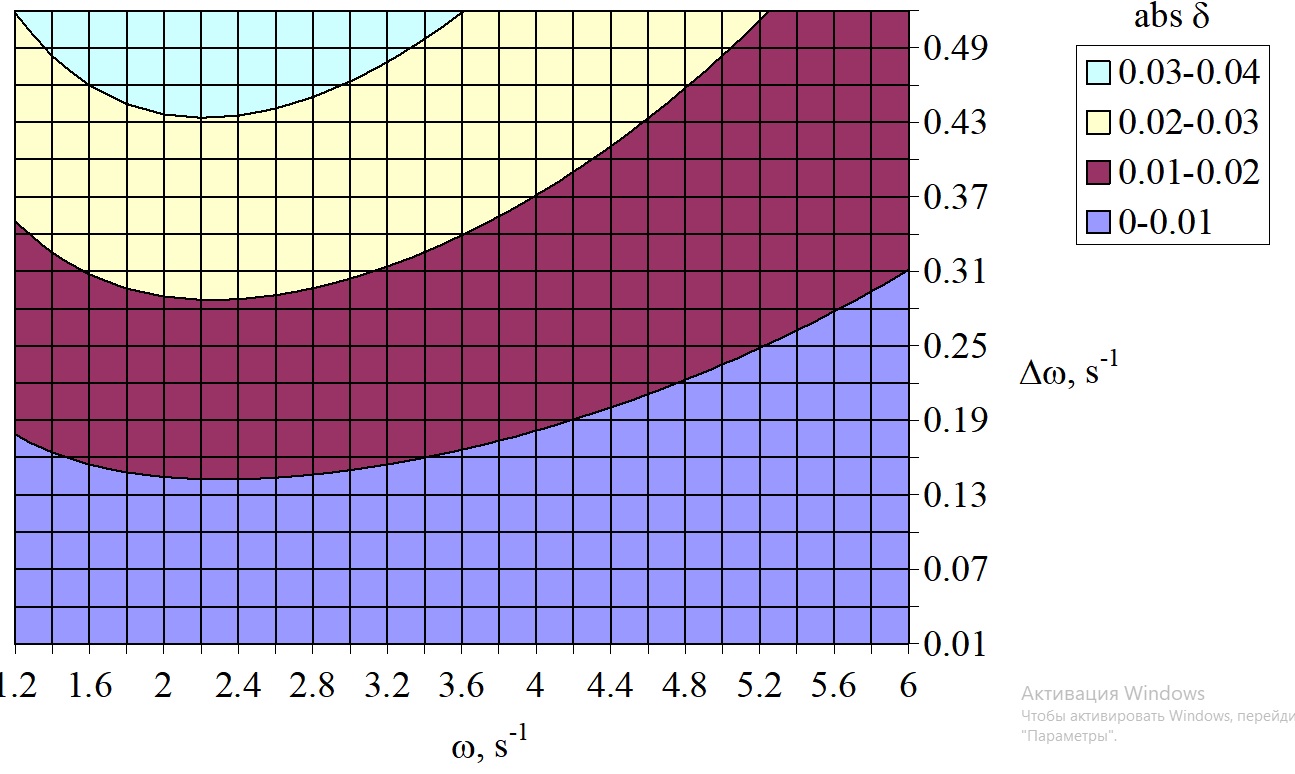
Для одного з перспективних засобів пожежогасіння – мобільної установки на базі сігвею – розроблено метод визначення часових параметрів оператора. Особливістю методу є використання апроксимації частинних похідних від фазово-частотної характеристики оператора по частоті, що визначаються на двох частотах. Такий підхід дозволяє позбавитись від необхідності в використанні трансцендентних рівнянь для визначення часових параметрів і перейти до алгебраїчного рівняння. Для обґрунтування величин частот, на яких здійснюється апроксимація частинних похідних, використовуються допускові критерії точності. Показано, що робочий діапазон оператора мобільної пожежної установки лежить в інфрачастотній області. Тому доцільним є визначення фазово-частотної характеристики оператора чисельним шляхом із використанням масиву даних стосовно перехідної функції оператора. Масив таких даних формується із використанням теореми Котельникова-Найквіста-Шеннона. Наведено перелік послідовних процедур для реалізації методу визначення часових параметрів оператора мобільної пожежної установки. Верифікація методу визначення часових параметрів оператора мобільної пожежної установки здійснена шляхом рішення тест-задачі. Показано, що при допустимих похибках часових параметрів оператора на рівні 5,0 %, похибки їх визначення не перевищують 2,0 %.
Отримані результаті можуть бути використані при визначення динамічних параметрів моделі оператора пожежної установки, за умови завдання допускового критерію по точності
Посилання
- Paris Firefighters Used This Remote-Controlled Robot to Extinguish the Notre Dame Blaze. Available at: https://spectrum.ieee.org/colossus-the-firefighting-robot-that-helped-save-notre-dame#toggle-gdpr
- Firefighter Drones – How Drones are Being Used for Helping Fire Departments. Available at: https://dronenodes.com/firefighter-drones/
- Segway-like robots designed to help firefighters and save lives. Available at: https://newatlas.com/firefighting-robot-ffr/27849/
- Villani, V., Czerniak, J. N., Sabattini, L., Mertens, A., Fantuzzi, C. (2019). Measurement and classification of human characteristics and capabilities during interaction tasks. Paladyn, Journal of Behavioral Robotics, 10 (1), 182–192. doi: https://doi.org/10.1515/pjbr-2019-0016
- Müller, R., Oehm, L. (2018). Process industries versus discrete processing: how system characteristics affect operator tasks. Cognition, Technology & Work, 21 (2), 337–356. doi: https://doi.org/10.1007/s10111-018-0511-1
- Kaber, D. B. (2017). Issues in Human–Automation Interaction Modeling: Presumptive Aspects of Frameworks of Types and Levels of Automation. Journal of Cognitive Engineering and Decision Making, 12 (1), 7–24. doi: https://doi.org/10.1177/1555343417737203
- Kopyt, A., Dziewoński, T., Jastrzębski, D., Golon, K., Mirosław, M. (2017). Modeling of a human driver for a car driving simulator. ANSS '17: Proceedings of the 50th Annual Simulation Symposium. doi: https://doi.org/10.22360/springsim.2017.anss.005
- Sobina, V., Hizhnyak, A., Abramov, Yu. (2019). Determination of parameters of the model of the operator of a mobile fire installation. Problemy pozharnoy bezopasnosti, 45, 161–166. Available at: https://nuczu.edu.ua/sciencearchive/ProblemsOfFireSafety/vol45/Sobina.pdf
- Aydin, Y., Tokatli, O., Patoglu, V., Basdogan, C. (2018). Stable Physical Human-Robot Interaction Using Fractional Order Admittance Control. IEEE Transactions on Haptics, 11 (3), 464–475. doi: https://doi.org/10.1109/toh.2018.2810871
- Yao, B., Zhou, Z., Wang, L., Xu, W., Liu, Q., Liu, A. (2018). Sensorless and adaptive admittance control of industrial robot in physical human-robot interaction. Robotics and Computer-Integrated Manufacturing, 51, 158–168. doi: https://doi.org/10.1016/j.rcim.2017.12.004
- Tölgyessy, M., Dekan, M., Hubinský, P. (2018). Human-Robot Interaction Using Pointing Gestures. Proceedings of the 2nd International Symposium on Computer Science and Intelligent Control. doi: https://doi.org/10.1145/3284557.3284718
- Nemec, D., Janota, A., Gregor, M., Hruboš, M., Pirník, R. (2017). Control of the mobile robot by hand movement measured by inertial sensors. Electrical Engineering, 99 (4), 1161–1168. doi: https://doi.org/10.1007/s00202-017-0614-3
- Buldakova, T. I., Suyatinov, S. I. (2019). Hierarchy of Human Operator Models for Digital Twin. 2019 International Russian Automation Conference (RusAutoCon). doi: https://doi.org/10.1109/rusautocon.2019.8867602
- Iqbal, M. U., Srinivasan, R. (2018). Simulator based performance metrics to estimate reliability of control room operators. Journal of Loss Prevention in the Process Industries, 56, 524–530. doi: https://doi.org/10.1016/j.jlp.2017.10.011
- Surya Atman, M. W., Noda, K., Funada, R., Yamauchi, J., Hatanaka, T., Fujita, M. (2019). On Passivity-Shortage of Human Operators for A Class of Semi-autonomous Robotic Swarms. IFAC-PapersOnLine, 51 (34), 21–27. doi: https://doi.org/10.1016/j.ifacol.2019.01.008
- Khudyakova, E. P., Sedelkova, V. A., Tarasenkov, G. G., Chertopolokhov, V. A., Belousova, M. D., Natura, E. S. (2021). Characteristics of operator performance in controlling a virtual lunar rover during simulated lunar gravity. AIP Conference Proceedings. doi: https://doi.org/10.1063/5.0035989
- Van Grootheest, H. A. (2017). Human-Operator Identification with Time-Varying ARX Models. TU Delft. Available at: https://repository.tudelft.nl/islandora/object/uuid:da69d1cf-3274-466f-bbc2-573f571d154e?collection=education
- Abramov, Yu. O., Tyshchenko, Ye. O., Sobyna, V. O. (2017). Pat. No. 119180 UA. Mobilna pozhezhna ustanovka. No. u201704071; declareted: 24.04.2017; published: 11.09.2017, Bul. No. 17. Available at: https://uapatents.com/4-119180-mobilna-pozhezhna-ustanovka.html
- Abramov, Yu., Basmanov, A. (2017). Modeli i kharakteristiki protsessa tusheniya pozharov klassa B. LAP LAMBERT Academic Publishing, 192.
- Abramov, Yu. O., Sobyna, V. O., Khyzhniak, A. A., Zakora, O. V., Bezuhla, Yu. S. (2020). Pat. No. 143723 UA. Sposib vyznachennia dynamichnykh kharakterystyk operatora mobilnoi pozhezhnoi ustanovky. No. u202001028; declareted: 17.02.2020; published: 10.08.2020, Bul. No. 15. Available at: https://base.uipv.org/searchINV/search.php?action=viewdetails&IdClaim=270522
- Abramov, Yu. O., Sobyna, V. O., Tyshchenko, Ye. O., Khyzhniak, A. A., Danilin, O. M. (2019). Pat. No. 135301 UA. Prystriy dlia vyznachennia kharakterystyk operatora mobilnoho pozhezhnoho robota. No. 201900596; declareted: 21.01.2019; published: 25.06.2019, Bul. No. 12. Available at: https://base.uipv.org/searchINV/search.php?action=viewdetails&IdClaim=259667
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2022 Yuriy Abramov, Oleksii Basmanov, Vitaliy Sobyna, Dmitry Sokolov, Ihor Cherepnov

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.






