Improving the method of linear-quadratic control over a physical model of vessel with azimuthal thrusters
DOI:
https://doi.org/10.15587/1729-4061.2023.273934Keywords:
modeling, thruster, linear-quadratic regulator, optimization, combined propulsion complex, dual purposeAbstract
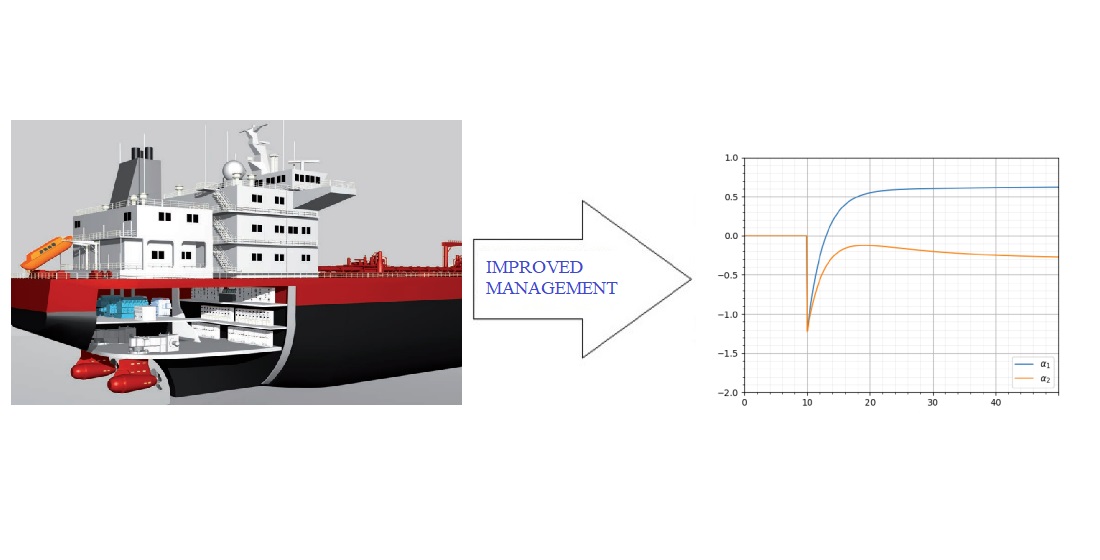
The object of this research is the algorithms for controlling large-scale models of sea-based vehicles (SBVs). The subject of the research is a linear-quadratic method for controlling a model of the propulsion complex with azimuthal thrusters (ATs) in the aft part. The problem is the solution between the interdependent throws of surge, sway, and yaw speeds predicted by the linear controller. Input signals are the rotational speeds and the angles of ATs propeller thrusts with respect to the diametrical plane of SBVs. During the simulation, step responses of a closed system for overload and rotation speed are compared. Simulation of speed jumps showed an adequate response, in contrast to the speed of rotation of ATs, which showed a greater impact on the system than the orientation of ATs. When modeling the rate of yaw, the behavior of the ATs angle did not correspond to its limitations inherent in the device rotating at the appropriate speed. It is concluded that this is the result of linearization of the actuators, and the proposed solution is to implement the strengthening of the task to better adapt to the rotating behavior of ATs. Despite these problems, the simulation showed the potential of the model and controller for use in similar situations. Several modifications are also offered to significantly improve the model and simulations. One of the main changes that could be made is the implementation of a predictive gain during the linearization of the ATs control system. The practical significance of the results obtained is the fact that the quadratic optimization model is an effective and reliable technique in the process of designing SBVs of various configurations of steering devices for optimal control
References
- Budashko, V. (2017). Formalization of design for physical model of the azimuth thruster with two degrees of freedom by computational fluid dynamics methods. Eastern-European Journal of Enterprise Technologies, 3 (7 (87)), 40–49. doi: https://doi.org/10.15587/1729-4061.2017.101298
- Budashko, V., Golikov, V. (2017). Theoretical-applied aspects of the composition of regression models for combined propulsion complexes based on data of experimental research. Eastern-European Journal of Enterprise Technologies, 4 (3 (88)), 11–20. doi: https://doi.org/10.15587/1729-4061.2017.107244
- Vitalii, B., Vitalii, N., Mark, N., Sergii, K. (2018). Parametrization and identification of energy flows in the ship propulsion complex. 2018 14th International Conference on Advanced Trends in Radioelecrtronics, Telecommunications and Computer Engineering (TCSET). doi: https://doi.org/10.1109/tcset.2018.8336205
- Budashko, V. V. (2017). Design of the three-level multicriterial strategy of hybrid marine power plant control for a combined propulsion complex. Electrical Engineering & Electromechanics, 2, 62–72. doi: https://doi.org/10.20998/2074-272x.2017.2.10
- Budashko, V., Nikolskyi, V., Onishchenko, O., Khniunin, S. (2016). Decision support system’s concept for design of combined propulsion complexes. Eastern-European Journal of Enterprise Technologies, 3 (8 (81)), 10–21. doi: https://doi.org/10.15587/1729-4061.2016.72543
- Chen, T.-Y. (2013). An interval-valued intuitionistic fuzzy LINMAP method with inclusion comparison possibilities and hybrid averaging operations for multiple criteria group decision making. Knowledge-Based Systems, 45, 134–146. doi: https://doi.org/10.1016/j.knosys.2013.02.012
- Fossen, T. I., Sagatun, S. I., Sørensen, A. J. (1996). Identification of dynamically positioned ships. Control Engineering Practice, 4 (3), 369–376. doi: https://doi.org/10.1016/0967-0661(96)00014-7
- Liang, C. C., Cheng, W. H. (2004). The optimum control of thruster system for dynamically positioned vessels. Ocean Engineering, 31 (1), 97–110. doi: https://doi.org/10.1016/s0029-8018(03)00016-7
- Uyar, E., Alpkaya, A. T., Mutlu, L. (2016). Dynamic Modelling, Investigation of Manoeuvring Capability and Navigation Control of a Cargo Ship by using Matlab Simulation. IFAC-PapersOnLine, 49 (3), 104–110. doi: https://doi.org/10.1016/j.ifacol.2016.07.018
- Naeem, W., Sutton, R., Ahmad, S. M. (2003). LQG/LTR Control of an Autonomous Underwater Vehicle Using a Hybrid Guidance Law. IFAC Proceedings Volumes, 36 (4), 31–36. doi: https://doi.org/10.1016/s1474-6670(17)36653-3
- Skjetne, R., Fossen, T. I., Kokotović, P. V. (2005). Adaptive maneuvering, with experiments, for a model ship in a marine control laboratory. Automatica, 41 (2), 289–298. doi: https://doi.org/10.1016/j.automatica.2004.10.006
- Ljungberg, F. (2020). Estimation of Nonlinear Greybox Models for Marine Applications. Linköping Studies in Science and Technology. Linköping. doi: https://doi.org/10.3384/lic.diva-165828
- Lang, X., Mao, W. (2020). A semi-empirical model for ship speed loss prediction at head sea and its validation by full-scale measurements. Ocean Engineering, 209, 107494. doi: https://doi.org/10.1016/j.oceaneng.2020.107494
- Aurlien, A., Breivik, M., Eriksen, B.-O. H. (2021). Multivariate Modeling and Adaptive Control of Autonomous Ferries. IFAC-PapersOnLine, 54 (16), 395–401. doi: https://doi.org/10.1016/j.ifacol.2021.10.122
- Sukkarieh, S., Nebot, E. M., Durrant-Whyte, H. F. (1999). A high integrity IMU/GPS navigation loop for autonomous land vehicle applications. IEEE Transactions on Robotics and Automation, 15 (3), 572–578. doi: https://doi.org/10.1109/70.768189
- Wang, Z., Montanaro, U., Fallah, S., Sorniotti, A., Lenzo, B. (2018). A gain scheduled robust linear quadratic regulator for vehicle direct yaw moment Control. Mechatronics, 51, 31–45. doi: https://doi.org/10.1016/j.mechatronics.2018.01.013
- Sandler, A., Budashko, V. (2022). Improving tools for diagnosing technical condition of ship electric power installations. Eastern-European Journal of Enterprise Technologies, 5 (5 (119)), 25–33. doi: https://doi.org/10.15587/1729-4061.2022.266267
- Caron, F., Duflos, E., Pomorski, D., Vanheeghe, P. (2006). GPS/IMU data fusion using multisensor Kalman filtering: introduction of contextual aspects. Information Fusion, 7 (2), 221–230. doi: https://doi.org/10.1016/j.inffus.2004.07.002
- Ccolque-Churquipa, A., Cutipa-Luque, J. C., Aco-Cardenas, D. Y. (2018). Implementation of a Measurement System for the Attitude, Heading and Position of a USV Using IMUs and GPS. 2018 IEEE ANDESCON. doi: https://doi.org/10.1109/andescon.2018.8564668
- Chrif, L., Kadda, Z. M. (2014). Aircraft Control System Using LQG and LQR Controller with Optimal Estimation-Kalman Filter Design. Procedia Engineering, 80, 245–257. doi: https://doi.org/10.1016/j.proeng.2014.09.084
- Budashko, V. V. (2016). Increasing control’s efficiency for the ship’s two-mass electric drive. Electrical Engineering & Electromechanics, 4, 34–42. doi: https://doi.org/10.20998/2074-272x.2016.4.05
- Gibson, J. D. (2003). Performance effects of optimal LQG eigenvalue placement in ship control. IECON’03. 29th Annual Conference of the IEEE Industrial Electronics Society (IEEE Cat. No.03CH37468). doi: https://doi.org/10.1109/iecon.2003.1279991
- Jerrelind E. (2021). Linear Quadratic Control of a Marine Vehicle with Azimuth Propulsion, Internet, Dissertation. Available from: http://urn.kb.se/resolve?urn=urn:nbn:se:liu:diva-178007
- Sir Elkhatem, A., Naci Engin, S. (2022). Robust LQR and LQR-PI control strategies based on adaptive weighting matrix selection for a UAV position and attitude tracking control. Alexandria Engineering Journal, 61 (8), 6275–6292. doi: https://doi.org/10.1016/j.aej.2021.11.057
- Gandhi, P., Adarsh, S., Ramachandran, K. I. (2017). Performance Analysis of Half Car Suspension Model with 4 DOF using PID, LQR, FUZZY and ANFIS Controllers. Procedia Computer Science, 115, 2–13. doi: https://doi.org/10.1016/j.procs.2017.09.070
- Linder, J. (2014). Graybox Modelling of Ships Using Indirect Input Measurements. Linköping. doi: https://doi.org/10.3384/lic.diva-111095
- Oosterveld, M. W. C., van Oossanen, P. (1975). Further computer-analyzed data of the Wageningen B-screw series. International Shipbuilding Progress, 22 (251), 251–262. doi: https://doi.org/10.3233/isp-1975-2225102
- Sáez, D., Cipriano, A. (1998). Fuzzy Linear Quadratic Regulator Applied to the Real Time Control of an Inverted Pendulum. IFAC Proceedings Volumes, 31 (4), 155–160. doi: https://doi.org/10.1016/s1474-6670(17)42150-1
- Sørensen, A. J., Ådnanes, A. (1997). High Performance Thrust Allocation Scheme in Positioning of Ships Based on Power and Torque Control. Marine Technology Society. Available at: https://www.researchgate.net/publication/255649795_High_Performance_Thrust_Allocation_Scheme_in_Positioning_of_Ships_Based_on_Power_and_Torque_Control
- Myrhorod, V., Hvozdeva, I., Budashko, V. (2020). Multi-parameter Diagnostic Model of the Technical Conditions Changes of Ship Diesel Generator Sets. 2020 IEEE Problems of Automated Electrodrive. Theory and Practice (PAEP). doi: https://doi.org/10.1109/paep49887.2020.9240905
- Budashko, V., Shevchenko, V. (2021). The synthesis of control system to synchronize ship generator assemblies. Eastern-European Journal of Enterprise Technologies, 1 (2 (109)), 45–63. doi: https://doi.org/10.15587/1729-4061.2021.225517
- Zanchetta, M., Tavernini, D., Sorniotti, A., Gruber, P., Lenzo, B., Ferrara, A. et al. (2019). Trailer control through vehicle yaw moment control: Theoretical analysis and experimental assessment. Mechatronics, 64, 102282. doi: https://doi.org/10.1016/j.mechatronics.2019.102282
- Budashko, V., Shevchenko, V. (2018). Synthesis of the Management Strategy of the Ship Power Plant for the Combined Propulsion Complex. 2018 IEEE 5th International Conference on Methods and Systems of Navigation and Motion Control (MSNMC). doi: https://doi.org/10.1109/msnmc.2018.8576266
- Hvozdeva, I., Myrhorod, V., Budashko, V., Shevchenko, V. (2020). Problems of Improving the Diagnostic Systems of Marine Diesel Generator Sets. 2020 IEEE 15th International Conference on Advanced Trends in Radioelectronics, Telecommunications and Computer Engineering (TCSET). doi: https://doi.org/10.1109/tcset49122.2020.235453
- Budashko, V. (2020). Thrusters Physical Model Formalization with regard to Situational and Identification Factors of Motion Modes. 2020 International Conference on Electrical, Communication, and Computer Engineering (ICECCE). doi: https://doi.org/10.1109/icecce49384.2020.9179301
- Wu, T.-S., Karkoub, M., Yu, W.-S., Chen, C.-T., Her, M.-G., Wu, K.-W. (2016). Anti-sway tracking control of tower cranes with delayed uncertainty using a robust adaptive fuzzy control. Fuzzy Sets and Systems, 290, 118–137. doi: https://doi.org/10.1016/j.fss.2015.01.010
- Sandler, A. K., Budashko, V. V. (2022). Volokonno-optychnyi inklinometr dlia diahnostuvannia elementiv sudnovoho propulsyvnoho kompleksu. XI naukova konferentsiya «Naukovi pidsumky 2022 roku». Kharkiv: Tekhnolohichnyi tsentr, 43–44. Available at: https://entc.com.ua/download/Збірник%20тез_11_Наукової%20конференції_НАУКОВІ%20ПІДСУМКИ%202022%20РОКУ_.pdf
- Budashko, V., Shevchenko, V. (2021). Solving a task of coordinated control over a ship automated electric power system under a changing load. Eastern-European Journal of Enterprise Technologies, 2 (2 (110)), 54–70. doi: https://doi.org/10.15587/1729-4061.2021.229033
- Budashko, V., Sandler, A., Shevchenko, V. (2022). Optimization of the control system for an electric power system operating on a constant-power hyperbole. Eastern-European Journal of Enterprise Technologies, 1 (8 (115)), 6–17. doi: https://doi.org/10.15587/1729-4061.2022.252172
- Budashko, V., Sandler, A., Shevchenko, V. (2022). Diagnosis of the Technical Condition of High-tech Complexes by Probabilistic Methods. TransNav, the International Journal on Marine Navigation and Safety of Sea Transportation, 16 (1), 105–111. doi: https://doi.org/10.12716/1001.16.01.11
- Myrhorod, V., Gvozdeva, I., Budashko, V. (2022). Approximation - markov models of changes in the technical condition parameters of power and energy installations in long-term operation. Aerospace Technic and Technology, 4sup2, 73–79. doi: https://doi.org/10.32620/aktt.2022.4sup2.11
- Hvozdeva, I. M., Myrhorod, V. F., Budasko, V. V. (2021). Two-dimensional singular decomposition of time series components. Applied Questions of Mathematical Modeling, 4, 66–75. doi: https://doi.org/10.32782/kntu2618-0340/2021.4.2.1.6
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Vitalii Budashko, Albert Sandler, Sergii Khniunin

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.





