Удосконалення методу лінійно-квадратичного керування фізичною моделлю судна з азимутальними підрулюючими пристроями
DOI:
https://doi.org/10.15587/1729-4061.2023.273934Ключові слова:
моделювання, підрулюючий пристрій, лінійно-квадратичний регулятор, оптимізація, комбінований пропульсивний комплекс, подвійне призначенняАнотація
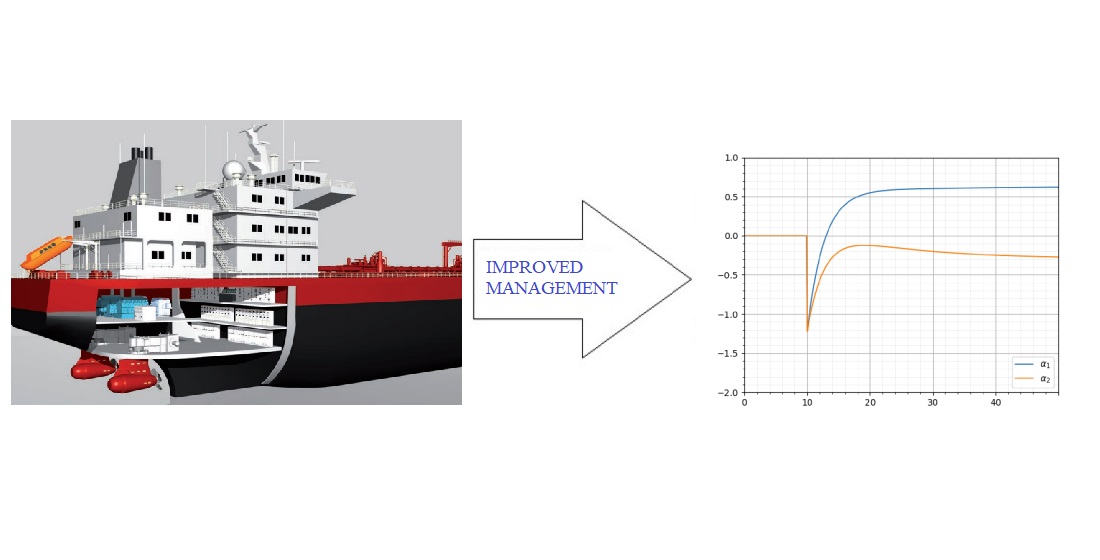
Об’єктом дослідження є алгоритми керування масштабними моделями транспортних засобів морського базування (ТЗМБ). Предметом дослідження є лінійно-квадратичний метод керування моделлю пропульсивного комплексу з азимутальними підрулюючими пристроями (АПП) у кормовій частині. Проблема полягає у розв’язці між взаємозалежними кидками швидкостей повздовжнього руху, дрейфу та нишпорення, що прогнозуються лінійним контролером. Вхідними сигналами є швидкості обертання і кути упорів гвинтів АПП по відношенню до діаметральної площини ТЗМБ. Під час моделювання порівнюються ступінчасті відгуки замкнутої системи на перевантаження та швидкість повороту. Моделювання стрибків швидкості показало адекватну реакцію на відміну від частоти обертання АПП, яка виявила більший вплив на систему, ніж орієнтація АПП. При моделюванні швидкості нишпорення поведінка кута АПП не відповідала його обмеженням, властивим пристрою, що обертається з відповідною частотою. Робиться висновок, що це є результатом лінеаризації виконавчих механізмів, а запропоноване рішення полягає в тому, щоб реалізувати посилення завдання для кращого пристосування до обертової поведінки АПП. Незважаючи на ці проблеми, моделювання показало потенціал моделі та контролера для використання у подібних ситуаціях. Також пропонується кілька модифікацій для значного покращення моделі та симуляцій. Однією з основних змін, яку можна було б зробити, є реалізація прогнозуючого посилення при лінеаризації системи управління АПП. Практична значущість отриманих результатів полягає в тому, що модель квадратичної оптимізації є ефективною та надійною технікою в процесі проєктування ТЗМБ різноманітної конфігурації підрулюючих пристроїв для оптимального керування
Посилання
- Budashko, V. (2017). Formalization of design for physical model of the azimuth thruster with two degrees of freedom by computational fluid dynamics methods. Eastern-European Journal of Enterprise Technologies, 3 (7 (87)), 40–49. doi: https://doi.org/10.15587/1729-4061.2017.101298
- Budashko, V., Golikov, V. (2017). Theoretical-applied aspects of the composition of regression models for combined propulsion complexes based on data of experimental research. Eastern-European Journal of Enterprise Technologies, 4 (3 (88)), 11–20. doi: https://doi.org/10.15587/1729-4061.2017.107244
- Vitalii, B., Vitalii, N., Mark, N., Sergii, K. (2018). Parametrization and identification of energy flows in the ship propulsion complex. 2018 14th International Conference on Advanced Trends in Radioelecrtronics, Telecommunications and Computer Engineering (TCSET). doi: https://doi.org/10.1109/tcset.2018.8336205
- Budashko, V. V. (2017). Design of the three-level multicriterial strategy of hybrid marine power plant control for a combined propulsion complex. Electrical Engineering & Electromechanics, 2, 62–72. doi: https://doi.org/10.20998/2074-272x.2017.2.10
- Budashko, V., Nikolskyi, V., Onishchenko, O., Khniunin, S. (2016). Decision support system’s concept for design of combined propulsion complexes. Eastern-European Journal of Enterprise Technologies, 3 (8 (81)), 10–21. doi: https://doi.org/10.15587/1729-4061.2016.72543
- Chen, T.-Y. (2013). An interval-valued intuitionistic fuzzy LINMAP method with inclusion comparison possibilities and hybrid averaging operations for multiple criteria group decision making. Knowledge-Based Systems, 45, 134–146. doi: https://doi.org/10.1016/j.knosys.2013.02.012
- Fossen, T. I., Sagatun, S. I., Sørensen, A. J. (1996). Identification of dynamically positioned ships. Control Engineering Practice, 4 (3), 369–376. doi: https://doi.org/10.1016/0967-0661(96)00014-7
- Liang, C. C., Cheng, W. H. (2004). The optimum control of thruster system for dynamically positioned vessels. Ocean Engineering, 31 (1), 97–110. doi: https://doi.org/10.1016/s0029-8018(03)00016-7
- Uyar, E., Alpkaya, A. T., Mutlu, L. (2016). Dynamic Modelling, Investigation of Manoeuvring Capability and Navigation Control of a Cargo Ship by using Matlab Simulation. IFAC-PapersOnLine, 49 (3), 104–110. doi: https://doi.org/10.1016/j.ifacol.2016.07.018
- Naeem, W., Sutton, R., Ahmad, S. M. (2003). LQG/LTR Control of an Autonomous Underwater Vehicle Using a Hybrid Guidance Law. IFAC Proceedings Volumes, 36 (4), 31–36. doi: https://doi.org/10.1016/s1474-6670(17)36653-3
- Skjetne, R., Fossen, T. I., Kokotović, P. V. (2005). Adaptive maneuvering, with experiments, for a model ship in a marine control laboratory. Automatica, 41 (2), 289–298. doi: https://doi.org/10.1016/j.automatica.2004.10.006
- Ljungberg, F. (2020). Estimation of Nonlinear Greybox Models for Marine Applications. Linköping Studies in Science and Technology. Linköping. doi: https://doi.org/10.3384/lic.diva-165828
- Lang, X., Mao, W. (2020). A semi-empirical model for ship speed loss prediction at head sea and its validation by full-scale measurements. Ocean Engineering, 209, 107494. doi: https://doi.org/10.1016/j.oceaneng.2020.107494
- Aurlien, A., Breivik, M., Eriksen, B.-O. H. (2021). Multivariate Modeling and Adaptive Control of Autonomous Ferries. IFAC-PapersOnLine, 54 (16), 395–401. doi: https://doi.org/10.1016/j.ifacol.2021.10.122
- Sukkarieh, S., Nebot, E. M., Durrant-Whyte, H. F. (1999). A high integrity IMU/GPS navigation loop for autonomous land vehicle applications. IEEE Transactions on Robotics and Automation, 15 (3), 572–578. doi: https://doi.org/10.1109/70.768189
- Wang, Z., Montanaro, U., Fallah, S., Sorniotti, A., Lenzo, B. (2018). A gain scheduled robust linear quadratic regulator for vehicle direct yaw moment Control. Mechatronics, 51, 31–45. doi: https://doi.org/10.1016/j.mechatronics.2018.01.013
- Sandler, A., Budashko, V. (2022). Improving tools for diagnosing technical condition of ship electric power installations. Eastern-European Journal of Enterprise Technologies, 5 (5 (119)), 25–33. doi: https://doi.org/10.15587/1729-4061.2022.266267
- Caron, F., Duflos, E., Pomorski, D., Vanheeghe, P. (2006). GPS/IMU data fusion using multisensor Kalman filtering: introduction of contextual aspects. Information Fusion, 7 (2), 221–230. doi: https://doi.org/10.1016/j.inffus.2004.07.002
- Ccolque-Churquipa, A., Cutipa-Luque, J. C., Aco-Cardenas, D. Y. (2018). Implementation of a Measurement System for the Attitude, Heading and Position of a USV Using IMUs and GPS. 2018 IEEE ANDESCON. doi: https://doi.org/10.1109/andescon.2018.8564668
- Chrif, L., Kadda, Z. M. (2014). Aircraft Control System Using LQG and LQR Controller with Optimal Estimation-Kalman Filter Design. Procedia Engineering, 80, 245–257. doi: https://doi.org/10.1016/j.proeng.2014.09.084
- Budashko, V. V. (2016). Increasing control’s efficiency for the ship’s two-mass electric drive. Electrical Engineering & Electromechanics, 4, 34–42. doi: https://doi.org/10.20998/2074-272x.2016.4.05
- Gibson, J. D. (2003). Performance effects of optimal LQG eigenvalue placement in ship control. IECON’03. 29th Annual Conference of the IEEE Industrial Electronics Society (IEEE Cat. No.03CH37468). doi: https://doi.org/10.1109/iecon.2003.1279991
- Jerrelind E. (2021). Linear Quadratic Control of a Marine Vehicle with Azimuth Propulsion, Internet, Dissertation. Available from: http://urn.kb.se/resolve?urn=urn:nbn:se:liu:diva-178007
- Sir Elkhatem, A., Naci Engin, S. (2022). Robust LQR and LQR-PI control strategies based on adaptive weighting matrix selection for a UAV position and attitude tracking control. Alexandria Engineering Journal, 61 (8), 6275–6292. doi: https://doi.org/10.1016/j.aej.2021.11.057
- Gandhi, P., Adarsh, S., Ramachandran, K. I. (2017). Performance Analysis of Half Car Suspension Model with 4 DOF using PID, LQR, FUZZY and ANFIS Controllers. Procedia Computer Science, 115, 2–13. doi: https://doi.org/10.1016/j.procs.2017.09.070
- Linder, J. (2014). Graybox Modelling of Ships Using Indirect Input Measurements. Linköping. doi: https://doi.org/10.3384/lic.diva-111095
- Oosterveld, M. W. C., van Oossanen, P. (1975). Further computer-analyzed data of the Wageningen B-screw series. International Shipbuilding Progress, 22 (251), 251–262. doi: https://doi.org/10.3233/isp-1975-2225102
- Sáez, D., Cipriano, A. (1998). Fuzzy Linear Quadratic Regulator Applied to the Real Time Control of an Inverted Pendulum. IFAC Proceedings Volumes, 31 (4), 155–160. doi: https://doi.org/10.1016/s1474-6670(17)42150-1
- Sørensen, A. J., Ådnanes, A. (1997). High Performance Thrust Allocation Scheme in Positioning of Ships Based on Power and Torque Control. Marine Technology Society. Available at: https://www.researchgate.net/publication/255649795_High_Performance_Thrust_Allocation_Scheme_in_Positioning_of_Ships_Based_on_Power_and_Torque_Control
- Myrhorod, V., Hvozdeva, I., Budashko, V. (2020). Multi-parameter Diagnostic Model of the Technical Conditions Changes of Ship Diesel Generator Sets. 2020 IEEE Problems of Automated Electrodrive. Theory and Practice (PAEP). doi: https://doi.org/10.1109/paep49887.2020.9240905
- Budashko, V., Shevchenko, V. (2021). The synthesis of control system to synchronize ship generator assemblies. Eastern-European Journal of Enterprise Technologies, 1 (2 (109)), 45–63. doi: https://doi.org/10.15587/1729-4061.2021.225517
- Zanchetta, M., Tavernini, D., Sorniotti, A., Gruber, P., Lenzo, B., Ferrara, A. et al. (2019). Trailer control through vehicle yaw moment control: Theoretical analysis and experimental assessment. Mechatronics, 64, 102282. doi: https://doi.org/10.1016/j.mechatronics.2019.102282
- Budashko, V., Shevchenko, V. (2018). Synthesis of the Management Strategy of the Ship Power Plant for the Combined Propulsion Complex. 2018 IEEE 5th International Conference on Methods and Systems of Navigation and Motion Control (MSNMC). doi: https://doi.org/10.1109/msnmc.2018.8576266
- Hvozdeva, I., Myrhorod, V., Budashko, V., Shevchenko, V. (2020). Problems of Improving the Diagnostic Systems of Marine Diesel Generator Sets. 2020 IEEE 15th International Conference on Advanced Trends in Radioelectronics, Telecommunications and Computer Engineering (TCSET). doi: https://doi.org/10.1109/tcset49122.2020.235453
- Budashko, V. (2020). Thrusters Physical Model Formalization with regard to Situational and Identification Factors of Motion Modes. 2020 International Conference on Electrical, Communication, and Computer Engineering (ICECCE). doi: https://doi.org/10.1109/icecce49384.2020.9179301
- Wu, T.-S., Karkoub, M., Yu, W.-S., Chen, C.-T., Her, M.-G., Wu, K.-W. (2016). Anti-sway tracking control of tower cranes with delayed uncertainty using a robust adaptive fuzzy control. Fuzzy Sets and Systems, 290, 118–137. doi: https://doi.org/10.1016/j.fss.2015.01.010
- Sandler, A. K., Budashko, V. V. (2022). Volokonno-optychnyi inklinometr dlia diahnostuvannia elementiv sudnovoho propulsyvnoho kompleksu. XI naukova konferentsiya «Naukovi pidsumky 2022 roku». Kharkiv: Tekhnolohichnyi tsentr, 43–44. Available at: https://entc.com.ua/download/Збірник%20тез_11_Наукової%20конференції_НАУКОВІ%20ПІДСУМКИ%202022%20РОКУ_.pdf
- Budashko, V., Shevchenko, V. (2021). Solving a task of coordinated control over a ship automated electric power system under a changing load. Eastern-European Journal of Enterprise Technologies, 2 (2 (110)), 54–70. doi: https://doi.org/10.15587/1729-4061.2021.229033
- Budashko, V., Sandler, A., Shevchenko, V. (2022). Optimization of the control system for an electric power system operating on a constant-power hyperbole. Eastern-European Journal of Enterprise Technologies, 1 (8 (115)), 6–17. doi: https://doi.org/10.15587/1729-4061.2022.252172
- Budashko, V., Sandler, A., Shevchenko, V. (2022). Diagnosis of the Technical Condition of High-tech Complexes by Probabilistic Methods. TransNav, the International Journal on Marine Navigation and Safety of Sea Transportation, 16 (1), 105–111. doi: https://doi.org/10.12716/1001.16.01.11
- Myrhorod, V., Gvozdeva, I., Budashko, V. (2022). Approximation - markov models of changes in the technical condition parameters of power and energy installations in long-term operation. Aerospace Technic and Technology, 4sup2, 73–79. doi: https://doi.org/10.32620/aktt.2022.4sup2.11
- Hvozdeva, I. M., Myrhorod, V. F., Budasko, V. V. (2021). Two-dimensional singular decomposition of time series components. Applied Questions of Mathematical Modeling, 4, 66–75. doi: https://doi.org/10.32782/kntu2618-0340/2021.4.2.1.6
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2023 Vitalii Budashko, Albert Sandler, Sergii Khniunin

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.






