Development of control software for self-organizing intelligent mobile robots
DOI:
https://doi.org/10.15587/1729-4061.2023.277840Keywords:
multiagent system, mobile robots, formation control, pattern formationAbstract
Maintaining a specific geometric formation during the movement is crucial for multiagent systems of mobile robots in various applications. Proper coordination can lead to reduced system costs, increased reliability and efficiency, and system adaptability and flexibility.
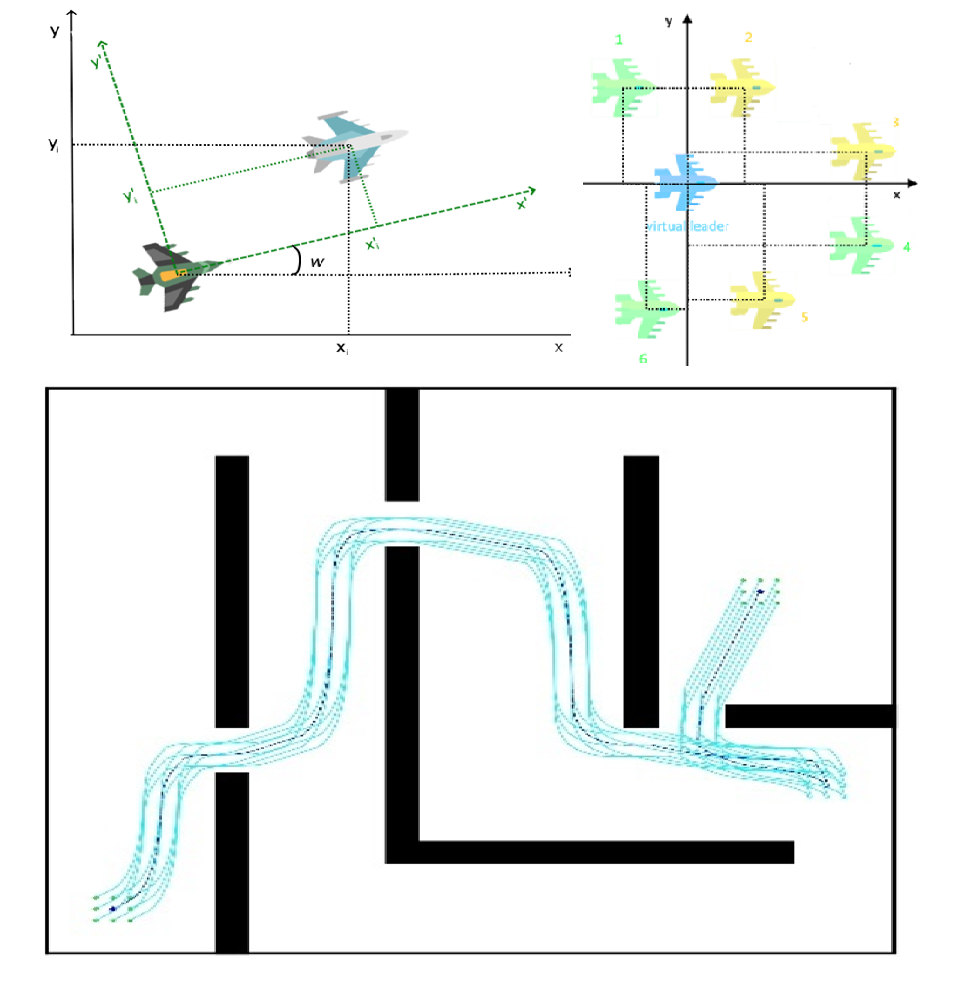
This research proposes a novel movement coordination method for self-governing multiagent systems of intelligent mobile robots. The proposed method uses a leader-follower technique with a virtual leader to maintain a specific geometric structure. Additionally, the epsilon greedy algorithm is utilized to avoid loops. To reduce power consumption, it is proposed to turn on only a few robots' lidars at a time. They could drive all the robots in the group, allowing them to reach the goal without colliding with obstacles.
Experiments on a complex map with nine robots were conducted to test the method's effectiveness. The success rate of the swarm reaching the target position and the number of steps needed were evaluated. Testing varied angular velocities of 1 to 20 degrees and linear velocities of 0.1 to 5.5 m/s. Results show the method effectively guides the robots without collisions.
This method enables a group of self-governing multiagent systems of intelligent mobile robots to maintain a desired formation while avoiding obstacles and reducing power consumption. The results of the experimental study demonstrate the method's potential to be implemented in real-world missions and traffic management systems to increase efficiency and reduce costs.
The proposed method can be utilized in military missions and traffic management systems, where maintaining a specific geometric formation is crucial. The method's ability to avoid obstacles and reduce power consumption can also lead to reduced costs and increased efficiency.
References
- Kereyev, A. K., Atanov, S. K., Aman, K. P., Kulmagambetova, Z. K., Kulzhagarova, B. T. (2020). Navigation system based on bluetooth beacons: Implementation and experimental estimation. Journal of Theoretical and Applied Information Technology, 98 (8), 1187–1200. Available at: http://www.jatit.org/volumes/Vol98No8/6Vol98No8.pdf
- Ioannidi, K., Christakis, Ch., Sautbekov, S., Frangos, P., Atanov, S. K. (2014). The Radiation Problem from a Vertical Hertzian Dipole Antenna above Flat and Lossy Ground: Novel Formulation in the Spectral Domain with Closed-Form Analytical Solution in the High Frequency Regime. International Journal of Antennas and Propagation, 2014, 1–9. doi: https://doi.org/10.1155/2014/989348
- Ouiazzane, S., Barramou, F., Addou, M. (2020). Towards a Multi-Agent based Network Intrusion Detection System for a Fleet of Drones. International Journal of Advanced Computer Science and Applications, 11 (10). doi: https://doi.org/10.14569/ijacsa.2020.0111044
- Sakurama, K., Azuma, S.-I., Sugie, T. (2019). Multiagent Coordination Via Distributed Pattern Matching. IEEE Transactions on Automatic Control, 64 (8), 3210–3225. doi: https://doi.org/10.1109/tac.2018.2885491
- Babazadeh, R., Selmic, R. (2020). Distance-Based Multiagent Formation Control With Energy Constraints Using SDRE. IEEE Transactions on Aerospace and Electronic Systems, 56 (1), 41–56. doi: https://doi.org/10.1109/taes.2019.2910361
- Ermekbayuly Kyzyrkanov, A., Kubeisinovich Atanov, S., Abdel Rahman Aljawarneh, S. (2021). Formation control and coordination of swarm robotic systems. The 7th International Conference on Engineering & MIS 2021. doi: https://doi.org/10.1145/3492547.3492704
- Li, Y., Zhang, J., Tong, S. (2022). Fuzzy Adaptive Optimized Leader-Following Formation Control for Second-Order Stochastic Multiagent Systems. IEEE Transactions on Industrial Informatics, 18 (9), 6026–6037. doi: https://doi.org/10.1109/tii.2021.3133927
- He, S., Wang, M., Dai, S.-L., Luo, F. (2019). Leader–Follower Formation Control of USVs With Prescribed Performance and Collision Avoidance. IEEE Transactions on Industrial Informatics, 15 (1), 572–581. doi: https://doi.org/10.1109/tii.2018.2839739
- Yan, J., Guan, X., Luo, X., Chen, C. (2017). Formation Control and Obstacle Avoidance for Multi-Agent Systems Based on Virtual Leader-Follower Strategy. International Journal of Information Technology & Decision Making, 16 (03), 865–880. doi: https://doi.org/10.1142/s0219622014500151
- Darintsev, O. V., Migranov, A. B. (2019). The Use of Genetic Algorithms for Distribution of Tasks in Groups of Mobile Robots with Minimization of Energy Consumption. 2019 International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon). doi: https://doi.org/10.1109/fareastcon.2019.8934927
- Simon, D., Kapellos, K., Espiau, B. (1998). Control laws, tasks and procedures with ORCCAD: application to the control of an underwater arm. International Journal of Systems Science, 29 (10), 1081–1098. doi: https://doi.org/10.1080/00207729808929599
- Nagy, I., Bencsik, A. L. (2007). A Simulation System for Behaviour based Potential Field Building in Multi-Agent Mobile Robot System. CI '07: Proceedings of the Third IASTED International Conference on Computational Intelligence, 7–12. Available at: https://dl.acm.org/doi/abs/10.5555/1672041.1672044
- Chang, Y., Yamamoto, Y. (2008). On‐line path planning strategy integrated with collision and dead‐lock avoidance schemes for wheeled mobile robot in indoor environments. Industrial Robot: An International Journal, 35 (5), 421–434. doi: https://doi.org/10.1108/01439910810893590
- Bulut, V. (2022). Optimal path planning method based on epsilon-greedy Q-learning algorithm. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 44 (3). doi: https://doi.org/10.1007/s40430-022-03399-w
- Liu, X., Zhang, P., Fang, H., Zhou, Y. (2021). Multi-Objective Reactive Power Optimization Based on Improved Particle Swarm Optimization With ε-Greedy Strategy and Pareto Archive Algorithm. IEEE Access, 9, 65650–65659. doi: https://doi.org/10.1109/access.2021.3075777
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Daulet Toibazarov, Gani Baiseitov, Abzal Kyzyrkanov, Shadi Aljawarneh, Sabyrzhan Atanov

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.





