Розробка програмного забезпечення керування для самоорганізації розумних мобільних роботів
DOI:
https://doi.org/10.15587/1729-4061.2023.277840Ключові слова:
мультиагентна система, мобільні роботи, управління формуванням, формування шаблонуАнотація
Збереження певної геометричної форми під час руху має вирішальне значення для мультиагентних систем мобільних роботів у різних застосуваннях. Належна координація може призвести до зниження витрат на систему, підвищення надійності та ефективності, а також адаптивності та гнучкості системи.
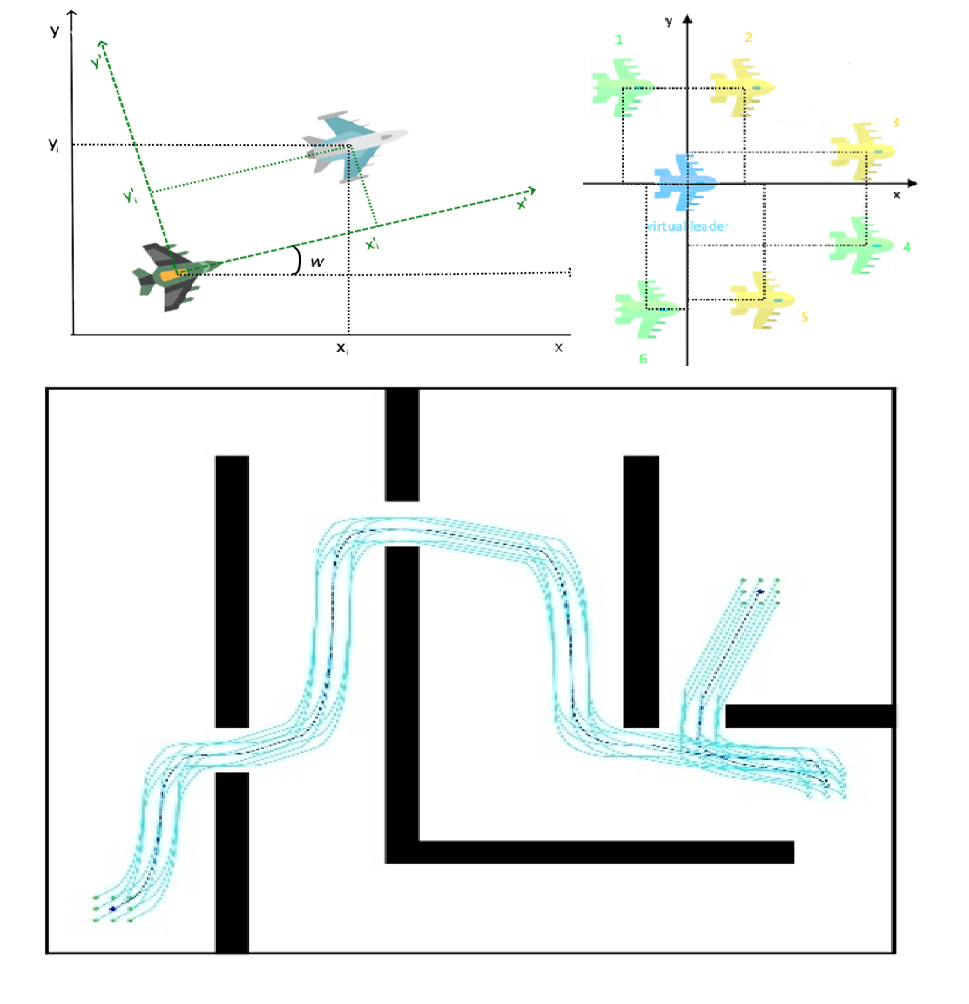
Це дослідження пропонує новий метод координації руху для самокерованих мультиагентних систем інтелектуальних мобільних роботів. Запропонований метод використовує техніку «лідер-слідувач» з віртуальним лідером для підтримки певної геометричної структури. Крім того, для уникнення циклів використовується жадібний алгоритм epsilon. Щоб зменшити енергоспоживання, пропонується вмикати лише кілька лідарів роботів одночасно. Вони могли керувати всіма роботами в групі, дозволяючи їм досягти мети, не стикаючись з перешкодами.
Щоб перевірити ефективність методу, були проведені експерименти на складній карті з дев’ятьма роботами. Було оцінено рівень успіху досягнення рою цільової позиції та кількість необхідних кроків. Тестування змінюваних кутових швидкостей від 1 до 20 градусів і лінійних швидкостей від 0,1 до 5,5 м/с. Результати показують, що метод ефективно керує роботами без зіткнень.
Цей метод дозволяє групі самокерованих мультиагентних систем інтелектуальних мобільних роботів підтримувати бажану форму, уникаючи перешкод і зменшуючи енергоспоживання. Результати експериментального дослідження демонструють потенціал методу для реалізації в реальних місіях і системах управління трафіком для підвищення ефективності та зниження витрат.
Запропонований метод може бути використаний у військових місіях і системах управління дорожнім рухом, де підтримка певної геометричної форми є вирішальною. Здатність методу уникати перешкод і зменшувати споживання електроенергії також може призвести до зниження витрат і підвищення ефективності.
Посилання
- Kereyev, A. K., Atanov, S. K., Aman, K. P., Kulmagambetova, Z. K., Kulzhagarova, B. T. (2020). Navigation system based on bluetooth beacons: Implementation and experimental estimation. Journal of Theoretical and Applied Information Technology, 98 (8), 1187–1200. Available at: http://www.jatit.org/volumes/Vol98No8/6Vol98No8.pdf
- Ioannidi, K., Christakis, Ch., Sautbekov, S., Frangos, P., Atanov, S. K. (2014). The Radiation Problem from a Vertical Hertzian Dipole Antenna above Flat and Lossy Ground: Novel Formulation in the Spectral Domain with Closed-Form Analytical Solution in the High Frequency Regime. International Journal of Antennas and Propagation, 2014, 1–9. doi: https://doi.org/10.1155/2014/989348
- Ouiazzane, S., Barramou, F., Addou, M. (2020). Towards a Multi-Agent based Network Intrusion Detection System for a Fleet of Drones. International Journal of Advanced Computer Science and Applications, 11 (10). doi: https://doi.org/10.14569/ijacsa.2020.0111044
- Sakurama, K., Azuma, S.-I., Sugie, T. (2019). Multiagent Coordination Via Distributed Pattern Matching. IEEE Transactions on Automatic Control, 64 (8), 3210–3225. doi: https://doi.org/10.1109/tac.2018.2885491
- Babazadeh, R., Selmic, R. (2020). Distance-Based Multiagent Formation Control With Energy Constraints Using SDRE. IEEE Transactions on Aerospace and Electronic Systems, 56 (1), 41–56. doi: https://doi.org/10.1109/taes.2019.2910361
- Ermekbayuly Kyzyrkanov, A., Kubeisinovich Atanov, S., Abdel Rahman Aljawarneh, S. (2021). Formation control and coordination of swarm robotic systems. The 7th International Conference on Engineering & MIS 2021. doi: https://doi.org/10.1145/3492547.3492704
- Li, Y., Zhang, J., Tong, S. (2022). Fuzzy Adaptive Optimized Leader-Following Formation Control for Second-Order Stochastic Multiagent Systems. IEEE Transactions on Industrial Informatics, 18 (9), 6026–6037. doi: https://doi.org/10.1109/tii.2021.3133927
- He, S., Wang, M., Dai, S.-L., Luo, F. (2019). Leader–Follower Formation Control of USVs With Prescribed Performance and Collision Avoidance. IEEE Transactions on Industrial Informatics, 15 (1), 572–581. doi: https://doi.org/10.1109/tii.2018.2839739
- Yan, J., Guan, X., Luo, X., Chen, C. (2017). Formation Control and Obstacle Avoidance for Multi-Agent Systems Based on Virtual Leader-Follower Strategy. International Journal of Information Technology & Decision Making, 16 (03), 865–880. doi: https://doi.org/10.1142/s0219622014500151
- Darintsev, O. V., Migranov, A. B. (2019). The Use of Genetic Algorithms for Distribution of Tasks in Groups of Mobile Robots with Minimization of Energy Consumption. 2019 International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon). doi: https://doi.org/10.1109/fareastcon.2019.8934927
- Simon, D., Kapellos, K., Espiau, B. (1998). Control laws, tasks and procedures with ORCCAD: application to the control of an underwater arm. International Journal of Systems Science, 29 (10), 1081–1098. doi: https://doi.org/10.1080/00207729808929599
- Nagy, I., Bencsik, A. L. (2007). A Simulation System for Behaviour based Potential Field Building in Multi-Agent Mobile Robot System. CI '07: Proceedings of the Third IASTED International Conference on Computational Intelligence, 7–12. Available at: https://dl.acm.org/doi/abs/10.5555/1672041.1672044
- Chang, Y., Yamamoto, Y. (2008). On‐line path planning strategy integrated with collision and dead‐lock avoidance schemes for wheeled mobile robot in indoor environments. Industrial Robot: An International Journal, 35 (5), 421–434. doi: https://doi.org/10.1108/01439910810893590
- Bulut, V. (2022). Optimal path planning method based on epsilon-greedy Q-learning algorithm. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 44 (3). doi: https://doi.org/10.1007/s40430-022-03399-w
- Liu, X., Zhang, P., Fang, H., Zhou, Y. (2021). Multi-Objective Reactive Power Optimization Based on Improved Particle Swarm Optimization With ε-Greedy Strategy and Pareto Archive Algorithm. IEEE Access, 9, 65650–65659. doi: https://doi.org/10.1109/access.2021.3075777
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2023 Daulet Toibazarov, Gani Baiseitov, Abzal Kyzyrkanov, Shadi Aljawarneh, Sabyrzhan Atanov

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.






