Implementation of Kalman filter algorithm to optimize the calculation of ultrasonic sensor distance value in Hooke law props system
DOI:
https://doi.org/10.15587/1729-4061.2024.296667Keywords:
Kalman filter algorithm, distance parameters, ultrasonic sensor, Hooke’s lawAbstract
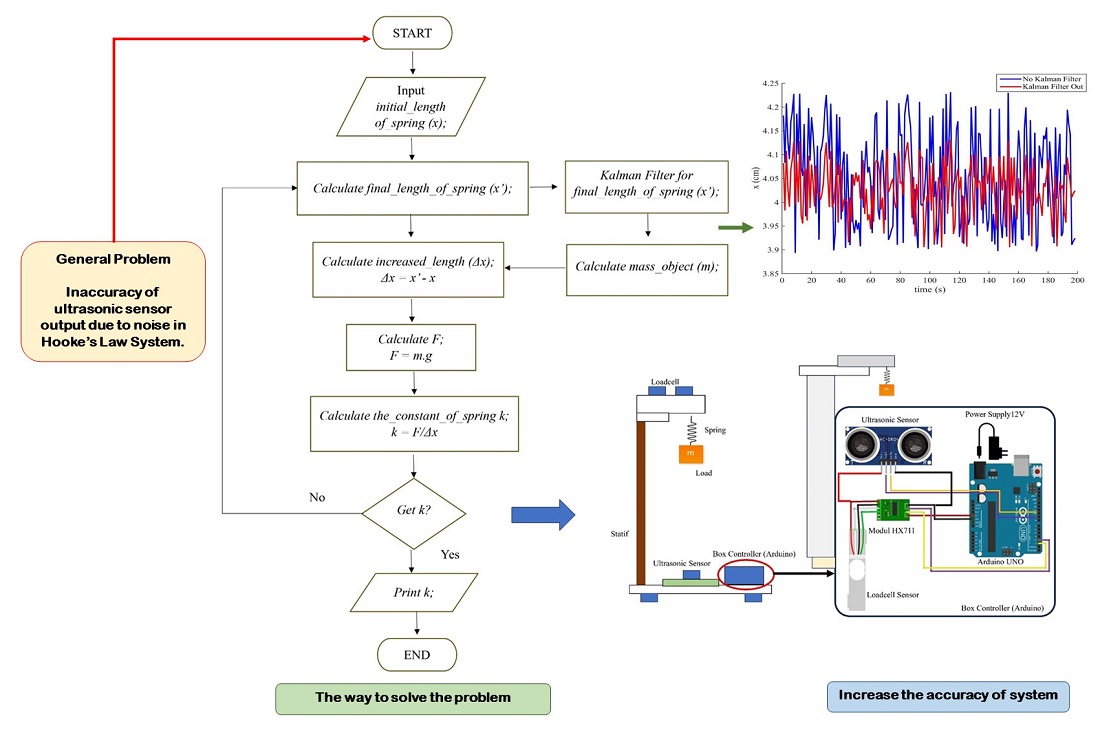
The Kalman filter algorithm is very important as a recursive algorithm method to optimize sensor output from physical parameter measurement systems, especially physics practicum demonstration systems. One of the distance parameter measurement demonstration systems used in Hooke’s law demonstration system is applied in physics practicum, the system has problems related to fluctuating or unstable sensor output. This research implements the Kalman filter algorithm on the Arduino IDE sketch to reduce noise that appears at the ultrasonic sensor output. The methodology used in this study includes the application of the Kalman filter algorithm to the Arduino IDE sketch with the variable value of the Kalman filter algorithm equation modified with a value of R=10, H=1, and Q=1, and returns the filtered Kalman out value. The Arduino output results are exported to Ms. Excel for further analysis and generate a filtered ultrasonic sensor output signal graph compared without using the Kalman filter. The ultrasonic sensor output noise filtration effectively reduces noise by showing a decrease in the mean squared error (MSE) value and obtaining the best performance of up to 89.23 %. The accuracy of Kalman filter filtration results can be seen from the calculation that the spring constant of filtered metal materials is smaller than the conventional measurement spring constant. Accurate and effective results with the implementation of the Kalman filter algorithm can be developed for the variation values of distance parameters and Kalman filter algorithm variables (R, Q, and H) with other value variations, especially variables that produce filtering curves close to straight lines. It was concluded that the Kalman filter algorithm was able to improve the performance of Hooke’s law prop system
Supporting Agency
- We express our gratitude to Jenderal Soedirman University Indonesia for supporting the implementation of this research so that this research runs well and smoothly.
References
- T. Shao, Z. Duan, Q. Ge, and H. Liu, “Recursive performance ranking of Kalman filter with mismatched noise covariances,” IET Control Theory Appl., vol. 13, no. 4, pp. 459–466, Mar. 2019, doi: 10.1049/iet-cta.2018.5064.
- M. Masyruhan, U. Pratiwi, and Y. Al Hakim, “Perancangan Alat Peraga Hukum Hooke Berbasis Mikrokontroler Arduino Sebagai Media Pembelajaran Fisika,” SPEKTRA J. Kaji. Pendidik. Sains, vol. 6, no. 2, pp. 134–145, 2020.
- J. Xu, Y. Wang, K. Xu, and T. Zhang, “Feature genes selection using fuzzy rough uncertainty metric for tumor diagnosis,” Comput. Math. Methods Med., vol. 2019, 2019, doi: 10.1155/2019/6705648.
- S. Ura and A. K. Ghosh, “Time latency‐centric signal processing: A perspective of smart manufacturing,” Sensors, vol. 21, no. 21, 2021, doi: 10.3390/s21217336.
- E. N. Budisusila, S. A. D. Prasetyowati, B. Y. Suprapto, and Z. Nawawi, “Neural network training for serial multisensor of autonomous vehicle system,” Int. J. Electr. Comput. Eng., vol. 12, no. 5, pp. 5415–5426, 2022, doi: 10.11591/ijece.v12i5.pp5415-5426.
- A. E. Elwakeel et al., “Design and Validation of a Variable-Rate Control Metering Mechanism and Smart Monitoring System for a High-Precision Sugarcane Transplanter,” Agric., vol. 13, no. 12, pp. 1–20, 2023, doi: 10.3390/agriculture13122218.
- S. R. Utama, A. Firdausi, and G. P. N. Hakim, “Control and Monitoring Automatic Floodgate Based on NodeMCU and IOT with Fuzzy Logic Testing,” J. Robot. Control, vol. 3, no. 1, pp. 14–17, 2022, doi: 10.18196/jrc.v3i1.11199.
- B. Khan, S. Nizamani, N. H. Kazi, S. Nizamani, and S. Nizamani, “A Prototype of Obstacle Avoidance for Autonomous Vehicle,” Iraqi J. Sci., vol. 63, no. 5, pp. 2203–2210, 2022, doi: 10.24996/ijs.2022.63.5.33.
- J. Price, E. Aaberg, C. Mo, and J. Miller, “Tracking Sensor Location by Video Analysis in Double-Shell Tank Inspections,” Appl. Sci., vol. 13, no. 15, 2023, doi: 10.3390/app13158708.
- Z. Czaja, “Simple Measurement Method for Resistive Sensors Based on ADCs of Microcontrollers,” IEEE Sens. J., pp. 1–1, 2023, doi: 10.1109/JSEN.2023.3341214.
- W. Jiang, Z. Luo, W. Wang, J. Liu, and L. Zhang, “Dynamic Sensitivity Evaluation for Force Transducers by Using a Gray-Bootstrap Method,” IEEE Sens. J., vol. 23, no. 23, pp. 29019–29028, Dec. 2023, doi: 10.1109/JSEN.2023.3323783.
- K. M. Khaled and R. S. Hegazy, “Metrological Characterization of Spring Impact Hammer Calibration,” Instrum. Mes. Métrologie, vol. 22, no. 5, pp. 215–221, Oct. 2023, doi: 10.18280/i2m.220505.
- J. R. Barber, “Eigenstrains and Inclusions,” 2022, pp. 457–474.
- U. B. Pili, “Work-based measurement of k with a spring-mass system: a demo of the work done by a variable force,” Phys. Educ., vol. 58, no. 4, p. 043002, Jul. 2023, doi: 10.1088/1361-6552/acdbb2.
- M. S. Al-Din Tahir, S. S. Hassan, and J. S. Chiad, “The mathematical model for lateral stiffness of variable length conical spring,” Pollack Period., vol. 17, no. 2, pp. 31–35, Jun. 2022, doi: 10.1556/606.2021.00494.
- C. Fang, J. Zhang, Y. Huang, X. Liu, and X. Dong, “Orientation dependence of elastic properties of Mg binary alloys: A first-principles study,” Comput. Condens. Matter, vol. 22, p. e00447, Mar. 2020, doi: 10.1016/j.cocom.2019.e00447.
- J. Zhang et al., “Insight into the Influence of Alloying Elements on the Elastic Properties and Strengthening of Copper: A High-Throughput First-Principles Calculations,” Metals (Basel)., vol. 13, no. 5, p. 875, May 2023, doi: 10.3390/met13050875.
- Y. Wei and Z. Chong, “A More Efficient Approach to Demonstrate Hooke’s Law,” Phys. Teach., vol. 60, no. 6, pp. 444–444, Sep. 2022, doi: 10.1119/5.0043860.
- G. A. Garcia, K. M. Wakumoto, and J. J. Brown, “Large-Deflection Nonlinear Mechanics of Curved Cantilevers Under Contact Point Loading,” J. Appl. Mech., vol. 88, no. 12, Dec. 2021, doi: 10.1115/1.4052000.
- V. Ivchenko, “Exploring statically indeterminate: examples allowing a simple resolution,” Phys. Educ., vol. 56, no. 4, p. 043007, Jul. 2021, doi: 10.1088/1361-6552/abf74a.
- J. J. Bissell, A. Ali, and B. J. Postle, “Illustrating dimensionless scaling with Hooke’s law,” Phys. Educ., vol. 57, no. 2, p. 023008, Mar. 2022, doi: 10.1088/1361-6552/ac45c9.
- R. Ahmad, B. Rinner, R. Wazirali, S. K. M. Abujayyab, and R. Almajalid, “Two-Level Sensor Self-Calibration Based on Interpolation and Autoregression for Low-Cost Wireless Sensor Networks,” IEEE Sens. J., vol. 23, no. 20, pp. 25242–25253, Oct. 2023, doi: 10.1109/JSEN.2023.3309759.
- V. M. Deshpande and R. Bhattacharya, “Guaranteed Robust Performance of $mathcal {H}_{infty }$ Filters With Sparse and Low Precision Sensing,” IEEE Trans. Automat. Contr., pp. 1–8, 2023, doi: 10.1109/TAC.2023.3276824.
- G. Schönfelder, “Signal Processing and Calibration,” in Sensors in Science and Technology, Wiesbaden: Springer Fachmedien Wiesbaden, 2022, pp. 745–755.
- S. Kanagasabapathi and M. Thushara, “FORWARD AND BACKWARD STATIC ANALYSIS FOR CRITICAL NUMERICAL ACCURACY IN FLOATING POINT PROGRAMS,” Comput. Sci., vol. 21, no. 2, Apr. 2020, doi: 10.7494/csci.2020.21.2.3421.
- J. Radosz and D. Pleban, “Ultrasonic noise measurements in the work environment,” J. Acoust. Soc. Am., vol. 144, no. 4, pp. 2532–2538, Oct. 2018, doi: 10.1121/1.5063812.
- S. Zhang, Y. Huang, X. Li, and H. Jeong, “Modeling of wave fields generated by ultrasonic transducers using a quasi-Monte Carlo method,” J. Acoust. Soc. Am., vol. 149, no. 1, pp. 7–15, Jan. 2021, doi: 10.1121/10.0002972.
- X. Chen, “Research on Optimal Control Method of Tennis Racket String Diameter Based on Kalman Filter Algorithm,” J. Electr. Comput. Eng., vol. 2022, 2022, doi: 10.1155/2022/9356608.
- X. Li and G. Hao, “Event-Triggered Kalman Filter and Its Performance Analysis,” Sensors, vol. 23, no. 4, pp. 1–13, 2023, doi: 10.3390/s23042202.
- L. Hu, R. Hu, Z. Ma, and W. Jiang, “State of Charge Estimation and Evaluation of Lithium Battery Using Kalman Filter Algorithms,” Materials (Basel)., vol. 15, no. 24, 2022, doi: 10.3390/ma15248744.
- X. Liu and X. Zhang, “State of Charge Estimation for Power Battery Using Improved Extended Kalman Filter Method Based on Neural Network,” Appl. Sci., vol. 13, no. 18, 2023, doi: 10.3390/app131810547.
- Q. Yang, K. Ma, L. Xu, L. Song, X. Li, and Y. Li, “A Joint Estimation Method Based on Kalman Filter of Battery State of Charge and State of Health,” Coatings, vol. 12, no. 8, 2022, doi: 10.3390/coatings12081047.
- Y. Zha, X. Liu, F. Ma, and C. C. Liu, “Vehicle state estimation based on extended Kalman filter and radial basis function neural networks,” Int. J. Distrib. Sens. Networks, vol. 18, no. 6, 2022, doi: 10.1177/15501329221102730.
- D. C. Lucena, R. C. S. Freire, J. M. M. Villanueva, and B. A. Luciano, “An innovative ultrasonic time of flight method based on extended Kalman filter for wind speed measurement,” J. Instrum., vol. 15, no. 04, pp. P04024–P04024, Apr. 2020, doi: 10.1088/1748-0221/15/04/P04024.
- J. C. Fabiano dos Santos, P. P. Pinheiro, and J. A. de Franca, “Recovering of Corrupted Ultrasonic Waves, for Determination of TOF Using the Zero-Crossing Detection Technique,” IEEE Trans. Instrum. Meas., vol. 68, no. 11, pp. 4234–4241, Nov. 2019, doi: 10.1109/TIM.2018.2890326.
- X. Lin et al., “Wearable Sensor-Based Monitoring of Environmental Exposures and the Associated Health Effects: A Review,” Biosensors, vol. 12, no. 12, p. 1131, Dec. 2022, doi: 10.3390/bios12121131.
- A. and Barhoum and Z. Altintas, Advanced Sensor Technology. Elsevier, 2023.
- E. and Hering and G. Schönfelder, Sensors in Science and Technology. Wiesbaden: Springer Fachmedien Wiesbaden, 2022.
- X. Bi, “Infrared Sensors and Ultrasonic Sensors,” 2021, pp. 143–168.
- O. Stepanov and A. Motorin, “Performance Criteria for the Identification of Inertial Sensor Error Models,” Sensors, vol. 19, no. 9, p. 1997, Apr. 2019, doi: 10.3390/s19091997.
- V. Jotsov, O. Kochan, and S. Jun, “Decreasing Influence of the Error Due to Acquired Inhomogeneity of Sensors by the Means of Artificial Intelligence,” 2018, pp. 89–130.
- P. Mercorelli, “A Fault Detection and Data Reconciliation Algorithm in Technical Processes with the Help of Haar Wavelets Packets,” Algorithms, vol. 10, no. 1, p. 13, Jan. 2017, doi: 10.3390/a10010013.
- P. Khatri, K. K. Gupta, and R. K. Gupta, “Drift compensation of commercial water quality sensors using machine learning to extend the calibration lifetime,” J. Ambient Intell. Humaniz. Comput., vol. 12, no. 2, pp. 3091–3099, Feb. 2021, doi: 10.1007/s12652-020-02469-y.
- P. M. Matyakubova, P. R. Ismatullaev, N. I. Avezova, and M. M. Makhmudzhonov, “Block Diagram of APCS of Installations for Wet-Heat Processing of Grain Products,” J. Eng. Phys. Thermophys., vol. 96, no. 6, pp. 1652–1657, Nov. 2023, doi: 10.1007/s10891-023-02835-5.
- Y. Toyoda, Y. Ishibashi, P. Huang, Y. Tateiwa, and H. Watanabe, “Efficiency of Cooperation between Remote Robot Systems with Force Feedback-Comparison with Cooperation between User and Remote Robot System,” Int. J. Mech. Eng. Robot. Res., pp. 900–905, 2020, doi: 10.18178/ijmerr.9.6.900-905.
- B. Lacaze, “Random propagation times for ultrasonics through polyethyilene,” Ultrasonics, vol. 111, p. 106313, Mar. 2021, doi: 10.1016/j.ultras.2020.106313.
- M. Lv, H. Wei, X. Fu, W. Wang, and D. Zhou, “A Loosely Coupled Extended Kalman Filter Algorithm for Agricultural Scene-Based Multi-Sensor Fusion,” Front. Plant Sci., vol. 13, no. April, 2022, doi: 10.3389/fpls.2022.849260.
- C. Schreppel, A. Pfeiffer, J. Ruggaber, and J. Brembeck, “Implementation of a C Library of Kalman Filters for Application on Embedded Systems,” Computers, vol. 11, no. 11, 2022, doi: 10.3390/computers11110165.
- H. Ma, L. Yan, Y. Xia, and M. Fu, Kalman filtering and information fusion. Springer, 2020.
- K. Fronckova and A. Slaby, “Kalman filter employment in image processing,” in Computational Science and Its Applications–ICCSA 2020: 20th International Conference, Cagliari, Italy, July 1–4, 2020, Proceedings, Part I 20, 2020, pp. 833–844.
- Q. Li, R. Li, K. Ji, and W. Dai, “Kalman filter and its application,” in 2015 8th International Conference on Intelligent Networks and Intelligent Systems (ICINIS), 2015, pp. 74–77.
- J. Shu, F. Hamano, and J. Angus, “Application of extended Kalman filter for improving the accuracy and smoothness of Kinect skeleton-joint estimates,” J. Eng. Math., vol. 88, pp. 161–175, 2014.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2024 Umi Pratiwi, Imam Fadli, Wahyu Tri Cahyanto, Hartono

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.






