Multi-criteria optimization of heterogeneous UAV fleet composition under probabilistic counteraction from surrounding environment based on mathematical and simulation modeling
DOI:
https://doi.org/10.15587/1729-4061.2026.365567Keywords:
unmanned aerial vehicles, heterogeneous fleet, multi-criteria optimization, Monte Carlo methodAbstract
This study considers a heterogeneous fleet of unmanned aerial vehicles (UAVs), consisting of two types of vehicles – main and auxiliary, operating under conditions of probabilistic medium resistance. The task addressed is to rationalize the informed selection of ratio between the main and auxiliary UAVs, which predetermines the survivability of the system, the level of possible losses, as well total resource costs.
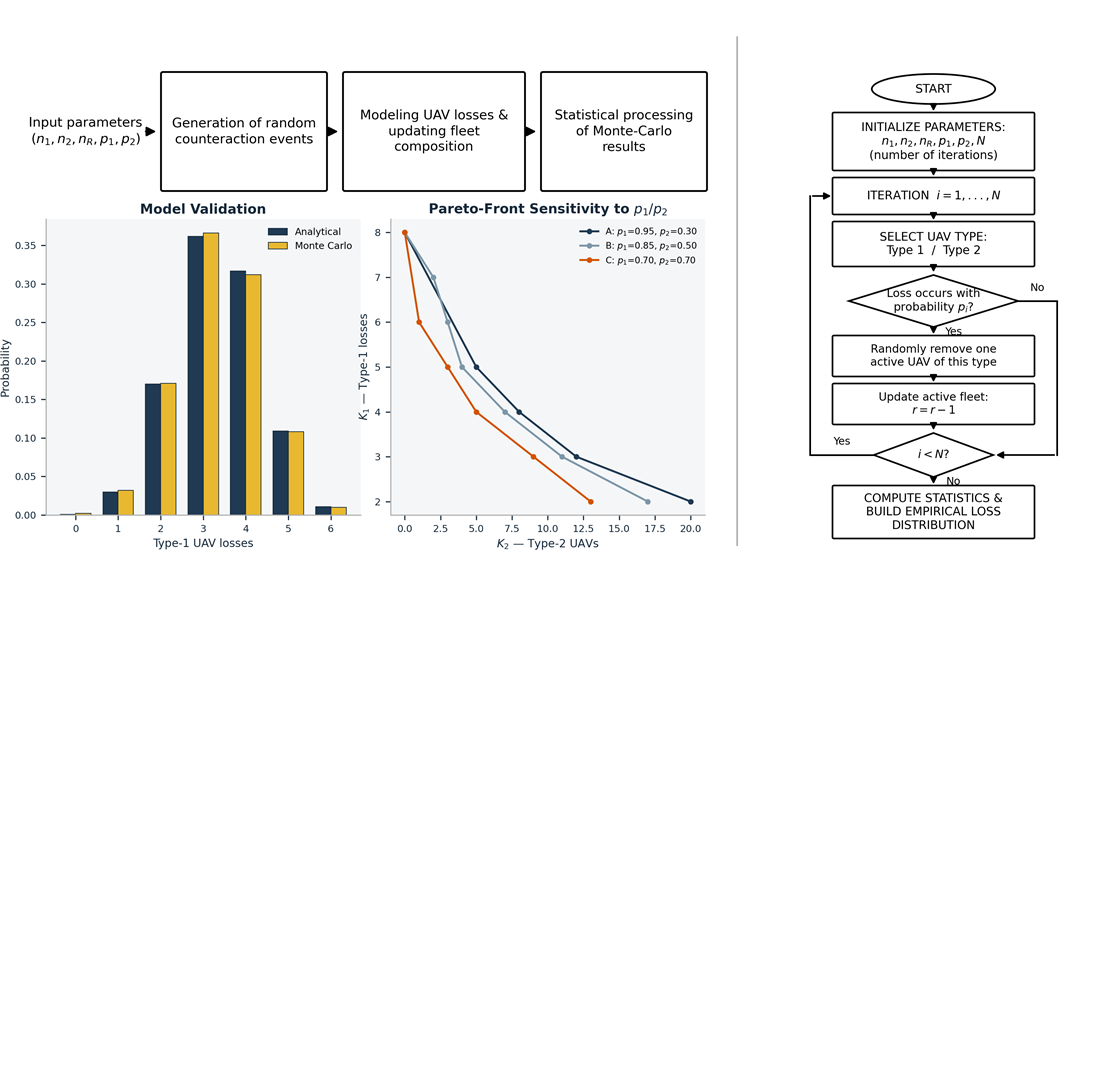
A two-criteria discrete mathematical statement of the problem has been proposed, which minimizes the most probable number of losses of main vehicles and the number of auxiliary UAVs. Considering a heterogeneous fleet of UAVs, the probability of losing any element in this fleet is different, especially given the various types of UAVs in it. This significantly complicates the possibility of predicting the integrity of the system over a certain period of its operation; therefore, a simulation model was built by using the Monte Carlo method. It reproduces the sequential nature of events, taking into account the change in the composition of elements after each probable loss. In its architecture, modules for generating random scenarios, modeling losses of fleet elements, and statistical processing of results can be distinguished.
To verify the model, an analytical distribution was performed for the base scenario, and a Pareto-optimal set of heterogeneous fleet configurations was constructed. The maximum discrepancy between the empirical and analytical distributions is 0.49% at N = 50,000 iterations. These results reflect the dependence on the reduction of losses for the main group of fleet elements and the number of auxiliary devices, which are considered cheaper and play the role of increasing stability for the system.
The results could prove useful for preliminary analysis when designing a heterogeneous UAV fleet with elements of different types, different functional purpose, and cost
References
- Golembo, V., Melnikov, R. (2018). Organization of work for a group of drones. Computer Systems and Network, 1 (905), 56–64. https://doi.org/10.23939/csn2018.905.056
- Petritoli, E., Leccese, F., Ciani, L. (2018). Reliability and Maintenance Analysis of Unmanned Aerial Vehicles. Sensors, 18 (9), 3171. https://doi.org/10.3390/s18093171
- Zaitseva, E., Levashenko, V., Mukhamediev, R., Brinzei, N., Kovalenko, A., Symagulov, A. (2023). Review of Reliability Assessment Methods of Drone Swarm (Fleet) and a New Importance Evaluation Based Method of Drone Swarm Structure Analysis. Mathematics, 11 (11), 2551. https://doi.org/10.3390/math11112551
- Zaitseva, E., Mukhamediev, R., Levashenko, V., Kovalenko, A., Kvassay, M., Kuchin, Y. et al. (2024). Comparative Reliability Analysis of Unmanned Aerial Vehicle Swarm Based on Mathematical Models of Binary-State and Multi-State Systems. Electronics, 13 (22), 4509. https://doi.org/10.3390/electronics13224509
- Zaitseva, E., Levashenko, V., Kvassay, M., Kharchenko, V. (2020). Reliability Evaluation of Heterogeneous Drone Fleet by Structure Function based Method. Proceedings of the 30th European Safety and Reliability Conference and 15th Probabilistic Safety Assessment and Management Conference, 4883–4889. https://doi.org/10.3850/978-981-14-8593-0_5145-cd
- Raychaudhuri, S. (2008). Introduction to Monte Carlo simulation. 2008 Winter Simulation Conference, 91–100. https://doi.org/10.1109/wsc.2008.4736059
- Dui, H., Zhang, C., Bai, G., Chen, L. (2021). Mission reliability modeling of UAV swarm and its structure optimization based on importance measure. Reliability Engineering & System Safety, 215, 107879. https://doi.org/10.1016/j.ress.2021.107879
- Barabash, O., Musienko, A., Svynchuk, O. (2021). Teoriya ymovirnostei. Kyiv: KPI im. Ihoria Sikorskoho, 193. Available at: https://ela.kpi.ua/server/api/core/bitstreams/d605e9e7-d1dc-4ee1-88ad-32a08fc6d570/content
- Zhao, J., Sun, J., Cai, Z., Wang, Y., Wu, K. (2022). Distributed coordinated control scheme of UAV swarm based on heterogeneous roles. Chinese Journal of Aeronautics, 35 (1), 81–97. https://doi.org/10.1016/j.cja.2021.01.014
- Hohmann, N., Bujny, M., Adamy, J., Olhofer, M. (2021). Hybrid Evolutionary Approach to Multi-objective Path Planning for UAVs. 2021 IEEE Symposium Series on Computational Intelligence (SSCI), 1–8. https://doi.org/10.1109/ssci50451.2021.9660187
- Kartashov, M. V. (2008). Imovirnist, protsesy, statystyka. Kyiv: VPTs «Kyivskyi universytet», 494. Available at: https://www.scribd.com/document/773774638/Kartashov
- Ehrgott, M. (2000). Multicriteria Optimization. Springer Berlin Heidelberg. https://doi.org/10.1007/978-3-662-22199-0
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Viktor Kornieiev, Oleh Yaremko

This work is licensed under a Creative Commons Attribution 4.0 International License.
The consolidation and conditions for the transfer of copyright (identification of authorship) is carried out in the License Agreement. In particular, the authors reserve the right to the authorship of their manuscript and transfer the first publication of this work to the journal under the terms of the Creative Commons CC BY license. At the same time, they have the right to conclude on their own additional agreements concerning the non-exclusive distribution of the work in the form in which it was published by this journal, but provided that the link to the first publication of the article in this journal is preserved.
A license agreement is a document in which the author warrants that he/she owns all copyright for the work (manuscript, article, etc.).
The authors, signing the License Agreement with TECHNOLOGY CENTER PC, have all rights to the further use of their work, provided that they link to our edition in which the work was published.
According to the terms of the License Agreement, the Publisher TECHNOLOGY CENTER PC does not take away your copyrights and receives permission from the authors to use and dissemination of the publication through the world's scientific resources (own electronic resources, scientometric databases, repositories, libraries, etc.).
In the absence of a signed License Agreement or in the absence of this agreement of identifiers allowing to identify the identity of the author, the editors have no right to work with the manuscript.
It is important to remember that there is another type of agreement between authors and publishers – when copyright is transferred from the authors to the publisher. In this case, the authors lose ownership of their work and may not use it in any way.






