Багатокритеріальна оптимізація складу гетерогенного парку БПЛА в умовах ймовірнісної протидії середовища на основі математичного та імітаційного моделювання
DOI:
https://doi.org/10.15587/1729-4061.2026.365567Ключові слова:
безпілотні літальні апарати, гетерогенний парк, багатокритеріальна оптимізація, метод Монте-КарлоАнотація
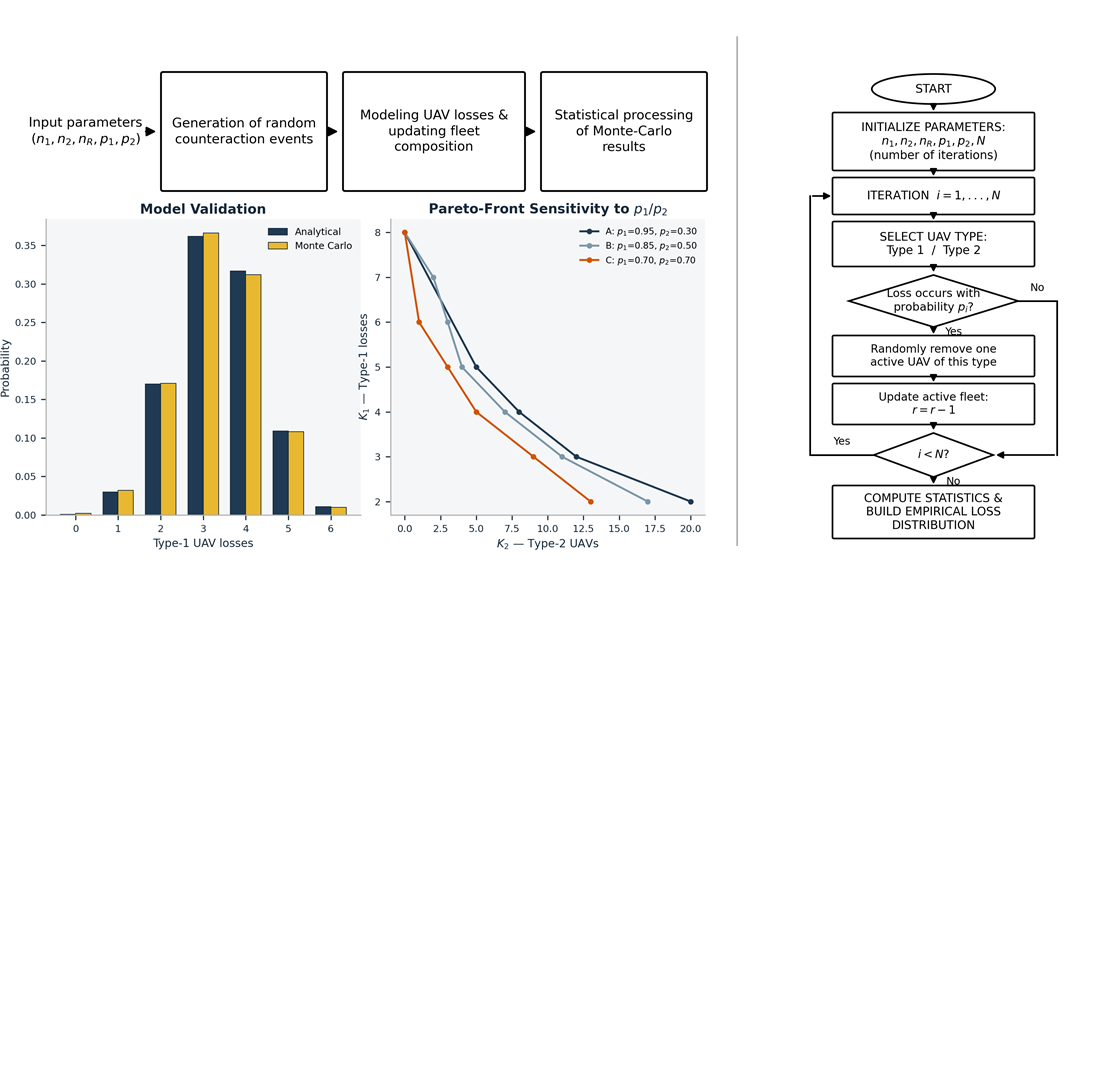
Об’єктом дослідження є гетерогенний парк безпілотних літальних апаратів (БПЛА), що складається з двох типів апаратів – основних та допоміжних, та функціонує в умовах ймовірнісної протидії середовища. Вирішувалась проблема визначення раціонального вибору співвідношення між основними та допоміжними БПЛА, від якого залежать живучість системи, рівень можливих втрат і загальні ресурсні витрати. Запропоновано двокритеріальну дискретну математичну постановку задачі, у якій мінімізуються найімовірніше число втрат основних апаратів та кількість допоміжних БПЛА. Розглядаючи гетерогенний парк БПЛА, ймовірність втрати будь-якого з елементів цього парку є різною, особливо враховуючи, що типи БПЛА можуть бути різними в ньому. Це суттєво ускладнює можливість передбачення цілісності системи при певному періоді її експлуатації, тому було розроблено імітаційну модель методом Монте-Карло. За допомогою неї відтворюється послідовний характер подій, враховуючи зміну складу елементів після кожної ймовірної втрати. В її архітектурі можна виділити блоки генерації випадкових сценаріїв, моделювання втрат елементів парку та статистичну обробку результатів. Для її перевірки було зроблено аналітичний розподіл для базового сценарію та побудовано Парето-оптимальну множину конфігурацій гетерогенного парку. Максимальна розбіжність емпіричного та аналітичного розподілів становить 0,49% при N = 50000 ітерацій. Ці результати відображають залежність від зменшення втрат для основної групи елементів парку та кількості допоміжних апаратів, які вважаються дешевшими та виконують роль підвищення стійкості для системи. Отримані результати придатні для попереднього аналізу при проєктуванні гетерогенного парку БПЛА з елементами різних типів, різного функціонального призначення та вартості
Посилання
- Golembo, V., Melnikov, R. (2018). Organization of work for a group of drones. Computer Systems and Network, 1 (905), 56–64. https://doi.org/10.23939/csn2018.905.056
- Petritoli, E., Leccese, F., Ciani, L. (2018). Reliability and Maintenance Analysis of Unmanned Aerial Vehicles. Sensors, 18 (9), 3171. https://doi.org/10.3390/s18093171
- Zaitseva, E., Levashenko, V., Mukhamediev, R., Brinzei, N., Kovalenko, A., Symagulov, A. (2023). Review of Reliability Assessment Methods of Drone Swarm (Fleet) and a New Importance Evaluation Based Method of Drone Swarm Structure Analysis. Mathematics, 11 (11), 2551. https://doi.org/10.3390/math11112551
- Zaitseva, E., Mukhamediev, R., Levashenko, V., Kovalenko, A., Kvassay, M., Kuchin, Y. et al. (2024). Comparative Reliability Analysis of Unmanned Aerial Vehicle Swarm Based on Mathematical Models of Binary-State and Multi-State Systems. Electronics, 13 (22), 4509. https://doi.org/10.3390/electronics13224509
- Zaitseva, E., Levashenko, V., Kvassay, M., Kharchenko, V. (2020). Reliability Evaluation of Heterogeneous Drone Fleet by Structure Function based Method. Proceedings of the 30th European Safety and Reliability Conference and 15th Probabilistic Safety Assessment and Management Conference, 4883–4889. https://doi.org/10.3850/978-981-14-8593-0_5145-cd
- Raychaudhuri, S. (2008). Introduction to Monte Carlo simulation. 2008 Winter Simulation Conference, 91–100. https://doi.org/10.1109/wsc.2008.4736059
- Dui, H., Zhang, C., Bai, G., Chen, L. (2021). Mission reliability modeling of UAV swarm and its structure optimization based on importance measure. Reliability Engineering & System Safety, 215, 107879. https://doi.org/10.1016/j.ress.2021.107879
- Barabash, O., Musienko, A., Svynchuk, O. (2021). Teoriya ymovirnostei. Kyiv: KPI im. Ihoria Sikorskoho, 193. Available at: https://ela.kpi.ua/server/api/core/bitstreams/d605e9e7-d1dc-4ee1-88ad-32a08fc6d570/content
- Zhao, J., Sun, J., Cai, Z., Wang, Y., Wu, K. (2022). Distributed coordinated control scheme of UAV swarm based on heterogeneous roles. Chinese Journal of Aeronautics, 35 (1), 81–97. https://doi.org/10.1016/j.cja.2021.01.014
- Hohmann, N., Bujny, M., Adamy, J., Olhofer, M. (2021). Hybrid Evolutionary Approach to Multi-objective Path Planning for UAVs. 2021 IEEE Symposium Series on Computational Intelligence (SSCI), 1–8. https://doi.org/10.1109/ssci50451.2021.9660187
- Kartashov, M. V. (2008). Imovirnist, protsesy, statystyka. Kyiv: VPTs «Kyivskyi universytet», 494. Available at: https://www.scribd.com/document/773774638/Kartashov
- Ehrgott, M. (2000). Multicriteria Optimization. Springer Berlin Heidelberg. https://doi.org/10.1007/978-3-662-22199-0
##submission.downloads##
Опубліковано
Як цитувати
Номер
Розділ
Ліцензія
Авторське право (c) 2026 Viktor Kornieiev, Oleh Yaremko

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Закріплення та умови передачі авторських прав (ідентифікація авторства) здійснюється у Ліцензійному договорі. Зокрема, автори залишають за собою право на авторство свого рукопису та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons CC BY. При цьому вони мають право укладати самостійно додаткові угоди, що стосуються неексклюзивного поширення роботи у тому вигляді, в якому вона була опублікована цим журналом, але за умови збереження посилання на першу публікацію статті в цьому журналі.
Ліцензійний договір – це документ, в якому автор гарантує, що володіє усіма авторськими правами на твір (рукопис, статтю, тощо).
Автори, підписуючи Ліцензійний договір з ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР», мають усі права на подальше використання свого твору за умови посилання на наше видання, в якому твір опублікований. Відповідно до умов Ліцензійного договору, Видавець ПП «ТЕХНОЛОГІЧНИЙ ЦЕНТР» не забирає ваші авторські права та отримує від авторів дозвіл на використання та розповсюдження публікації через світові наукові ресурси (власні електронні ресурси, наукометричні бази даних, репозитарії, бібліотеки тощо).
За відсутності підписаного Ліцензійного договору або за відсутністю вказаних в цьому договорі ідентифікаторів, що дають змогу ідентифікувати особу автора, редакція не має права працювати з рукописом.
Важливо пам’ятати, що існує і інший тип угоди між авторами та видавцями – коли авторські права передаються від авторів до видавця. В такому разі автори втрачають права власності на свій твір та не можуть його використовувати в будь-який спосіб.







